导语:Boston Dynamics 在机器人动力方面堪称翘楚,其由双足或多足机器人组成的机器人天团总是时不时能给我们带来惊喜。上周,Boston Dynamics 又发布了一段视频,并再次推出了一款全新机器人——Handle,这也是Boston Dynamics 首次尝试轮式机器人。从视频中我们可以看到,Handle 机器人能够载重、下蹲和跨越障碍物,比上一款 Atlas 机器人更为先进。Boston Dynamics 公司创始人兼总裁 Marc Raibert 在接受 IEEE Spectrum 采访时表示,双轮仿人形机器人是一个伟大的发明,使用轮腿混合系统是个两全其美的解决方案。
为什么Boston Dynamics 要选择轮腿混合系统,相对于Altas 的双足系统来说突破点在哪里?加了个双轮后,比之前的双腿直立行走控制难度变小了还是变大了?平衡车和Handle的轮子在稳定结构方面有什么不一样的地方?对于这些大家都比较好奇的问题,雷锋网本期公开课我们邀请到浙江大学控制学院机器人实验室博士李超为我们一一解答。
李超
- 浙江大学控制学院机器人实验室博士,“赤兔”四足机器人运动控制负责人,波士顿动力的忠实拥趸,足式机器人实用化方向的创业者。
- 主要研究领域是足式机器人的运动规划与平衡控制。作为核心骨干,研制了目前国内唯一能够实现奔跑的电驱四足机器人“赤兔”, 并获得广泛关注和认可。所在“赤兔”团队专注于足式机器人实用化和产品化的研发和创业。
公开课视频:
文字整理部分:
从这个视频我总结了Handle几个亮点:新的机器人形态:轮+腿;运动更加快速灵活;超强的弹跳能力。
Handle展示的功能包括快速加速和制动;运动过程中转弯和原地的高速转弯;单轮过斜坡,姿态保持稳定;Endpoint Control(Spotmini展示);搬运货物(100lbs);快速下台阶;室外雪地滑行;弹跳。其中第二条、第三条以及最后一条展示的是与腿相关的技术。
Handle主要技术包括腿式机器人;轮式和平衡车;地图构建与定位导航;移动操作(Mobile Manipulation);系统设计与集成。
波士顿动力(Boston Dynamics)
- 波士顿动力发展路线
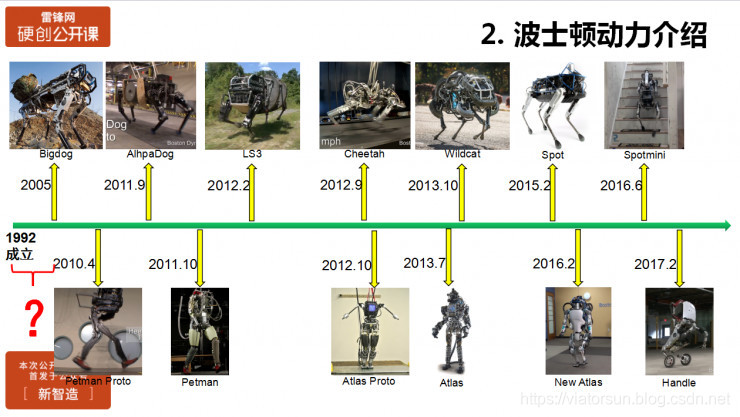
波士顿动力是在1992年创立的,创立时间比在2013年将其收购的谷歌还长(雷锋网注:2016年3月有媒体爆出消息,Google母公司Alphabet计划放弃机器人计划,并出售收购不到3年的波士顿动力。)。创始人Marc Raibert 可以说是我的偶像,他时常穿着一件花衬衣,我总觉得他像一个挺慈祥的老人。
- 波士顿动力创始人Marc Raibert
我一直认为波士顿动力是创业公司但不是初创公司,它的主要产品是双足和四足机器人,而它的相关技术在成立之后很少公开,很多时候参考Raibert在MIT Leglab的工作(雷锋网(公众号:雷锋网)注:1980年Raibert在卡内基•梅隆大学创立了CMU leg实验室,主要从事研究与机器人相关的控制、机器视觉放方面的技术,当时Raibert在这个大学担任副教授,到1986年,当Raibert升任麻省理工学院电子工程与计算机科学系的教授后,他将实验室搬到了麻省理工学院)。
- Marc Raibert在1980s做的机器人研究

这个研究路线是从单腿到双腿到四足,其中单腿是基础,我个人感觉它的运动控制核心是动态平衡(Dynamic Balance)。其实我感觉Boston Dynamics 应该翻译成波士顿动态或者波士顿动力学,而不是波士顿动力。
单腿机器人
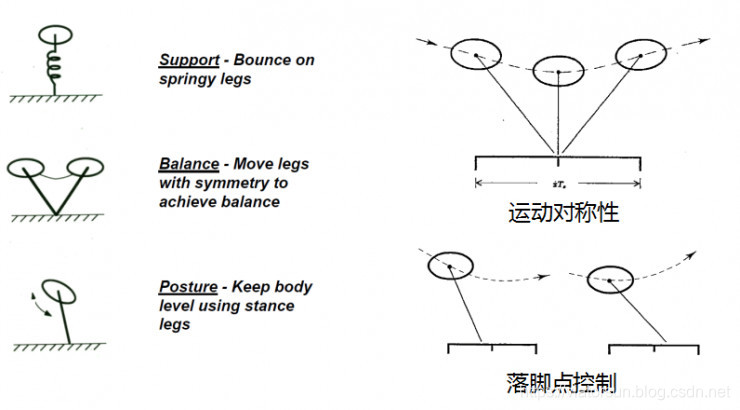
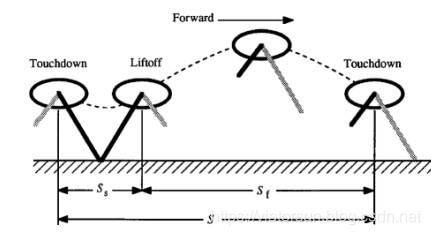
单腿弹跳的原理包括运动对称性和落脚点控制。其中,运动对称性的现象是指单腿机器人以一定速度跳跃落地对应一个特殊的落脚点 (NP点,Neutral Point),机器人落地后的运动状态相对于NP点左右对称,最后机器人会以相同的速度离地。
落脚点控制是核心的。如果机器人需要以当前速度继续运动,就将落脚点控制到NP点着地;如果需要加速,就将落脚点控制到小于NP 点着地;反之,如果需要减速,就需要以大于NP点的落脚点着地。
单腿弹跳的过程其实就像小朋友玩的弹跳器,正常的时候你只要保持弹跳器竖直着地就可以在原地不断弹跳,如果你想向前运动,就需要改变下弹跳器着地的角度就可以的,如果要跳得高一点,就需要人腿的弹跳器着地的时候加下力。
双足机器人
双足跑步
双足跑步可以等效成两条单腿相互交错运动,即两条腿的运动在相位上相差180度,就可以产生向前弹跳的运动。其实双腿从算法和硬件上都比单腿容易,因为飞行相占比少很多。
双足步行

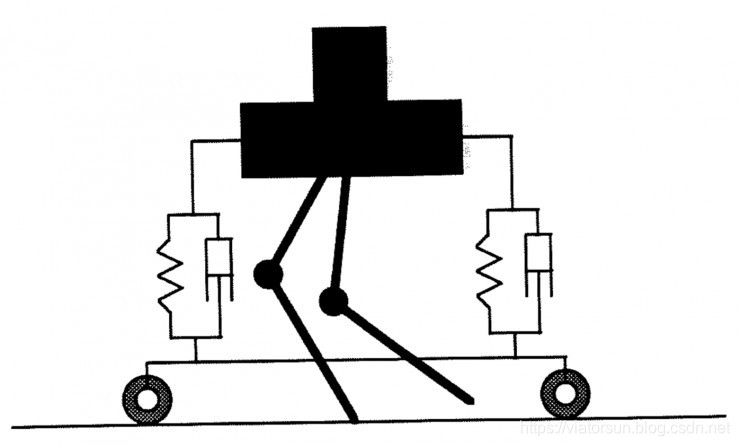
双足行走跟双足跑跳不一样,一般来说,双足行走时身体高度和姿态均保持恒定。此时,腿的作用可以模拟成一个弹簧阻尼系统,完成对身体高度和姿态的闭环控制。水平方向可以等效一个阻尼器牵引身体的运动,完成对水平速度的闭环控制。
双足平衡
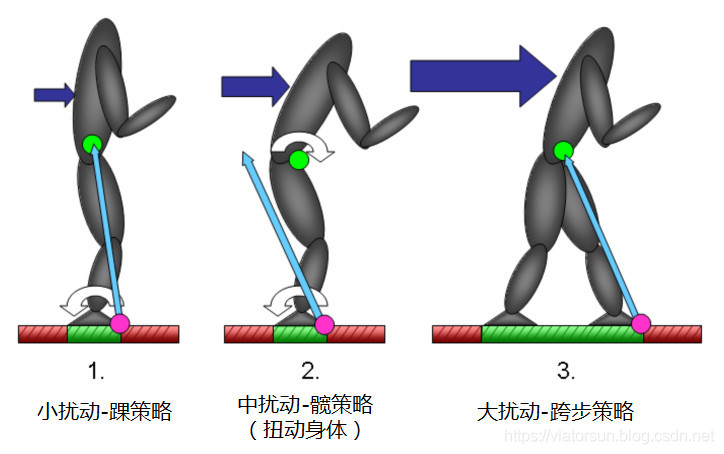
双足平衡控制,按照应对扰动量的大小依次可分为4种策略:踝策略、髋策略、跨步策略以及安全倒策略。外部扰动后,身体的质心投影位置(CoM)依然在脚掌范围内,则通过扭动脚掌踝关节,将身体控制回原位;当CoM超出脚掌范围,则通过髋关节的作用(身体的扭动)将身体拉回原位;当扰动过大超出髋策略的应对范围,则通过迈步的方式在下一步把身体的运动状态控制回来;最后,当扰动过大超出跨步策略的应对范围,机器人的摔倒不可避免,则及时将机器人调整到一个安全的姿态,以避免机器人倒地时受损或过度受损。
四足运动
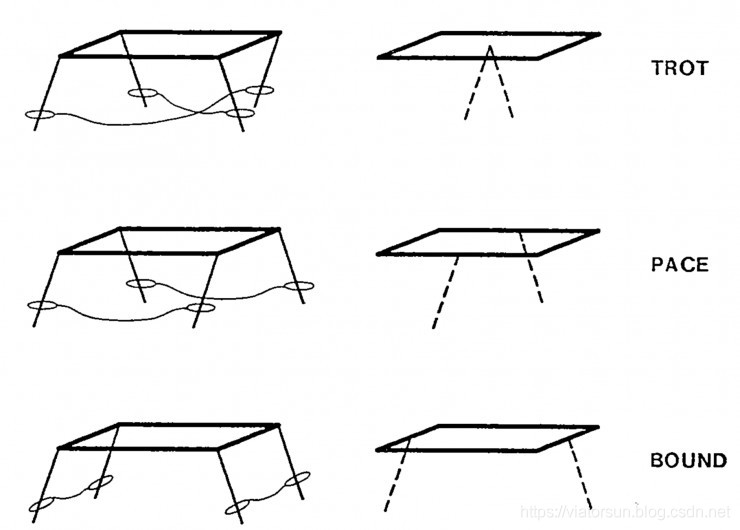
等效双足策略,就是根据四足机器人的不同步态,通过力等效原理将四足机器人等效成不同的双足机器人进行规划控制。
Why轮+腿?
足式机器人优势:
立体复杂路面主要就是台阶和楼梯,相比履带式,足式机器人尺寸小而且更灵活,对地面无损坏。总之,走轮(履)式不能走的路,到轮(履)式到不了的地方!
足式机器人劣势:
-
能量利用效率低
下图是不同物种之间的能量利用效率对比图。比如说人在摄入一定能量后如果走路能走1公里,而骑车能骑3公里,而这个时候还要考虑到另外一个因素就是续航。2013年波士顿动力将动力由汽油改为电池,电池比较小续航时间也就比较短,所以一定要在能量利用效率上做改进。另外,足式机器人在执行任务的时候,面对的绝大部分路面都比较平坦,完全足式效率太低。

-
快速运动能力不足
Handle速度可达24km/h
New Atlas 速度差不多5km/h(猜测) -
结构复杂,控制难度大,成本高
左为Altas,右为Handle
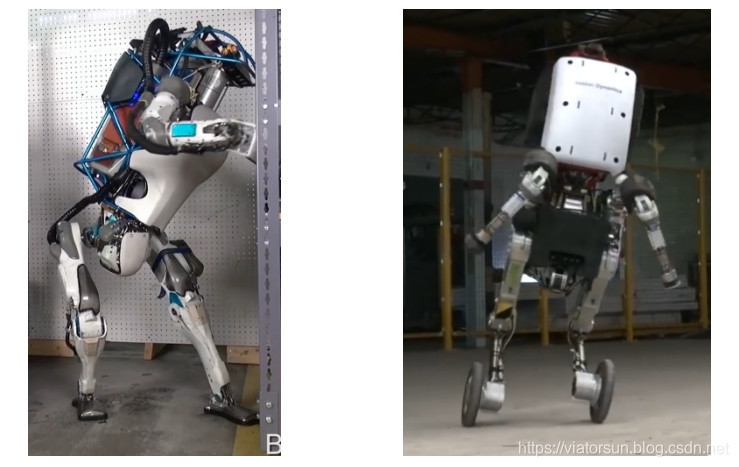
Handle腿部关节只有3个,设计、加工和装配难度都下降
控制难度: 足式步行 >> 轮式运动
Atals腿是3维,Handle腿是2维平面的,算法难度降低
少了三个关节,驱动和加工成本降低
所以,结合这几点波士顿动力选择轮腿结合的方式也是为了扬长避短达到优势互补。在这里我也觉得,轮(履)式结合是足式面向实用化的一个必然趋势!
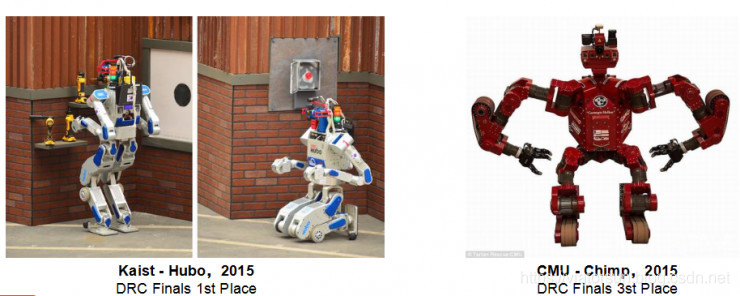
在2015年Darpa机器人挑战赛总决赛中(Darpa Robotics Challenge Finals 2015)获得第一名和第三名的机器人都使用了轮腿式设计。
关于Handle几个问题
Handle基于Atlas的躯干,双轮的轮子,突破点在哪里?
个人理解难度突破并不大,主要是波士顿动力面向实际应用,对双足行走一些固有不足进行完善(行走效率和能量利用效率等)。
目前来看,轮腿(履)混合是足式机器人面向实用化开发的一个方向,包括DRC比赛第一名韩国HUBO机器人,第三名CMU的chimp机器人。
Handle加了个双轮后,很多人觉得比之前的双腿直立行走控制难度变小了,事实是这样的吗?
对比ATLAS,控制难度确实变小了。不仅是控制难度变小了,整个腿部驱动和结构设计难度也小很多。
平衡车和Handle的轮子在稳定结构方面有什么不一样的地方?
平衡车和Handle的最大差异是腿的作用。Handle的腿可以模拟主动悬挂系统,可以改变腿长和支撑力。可以通过改变腿长,改变身体重心高度、左右位置和姿态,提高轮式在复杂路况下的通行能力、身体的平稳性和高速运动转弯时的安全性。另外,因为身体和手臂的扭动可以辅助提高前向运动的稳定性。
Handle倒滑+弹跳背后的技术难不难?
倒滑:按之前波士顿动力腿型的介绍,前向和后向滑动的运动控制几乎没有差异。倒滑的原因是机器人在裆部竖装了一个激光雷达(见下图),前滑时,腿会遮挡视线。

弹跳:对boston dynamcis来说, Handle弹跳的算法难度并不大。见MIT最早双足机器人空翻视频,理论上算法难度远大于Handle ,更不提Wildcat在高速奔跑Gallop的算法难度。主要难度在于硬件方面,包括动力和机构。
Handle的两个轮子,一个轮子在爬坡,一个轮子在平地,速度肯定不一样,请问这是两个轮子的速度和稳定性怎么控制的?
个人对轮式运动不是很了解。但现有的全地形越野车很容易做到这点,甚至可以完成更复杂的任务(并且其悬挂是被动的)。
Handle的优势在于其腿模拟一个主动悬挂,可以主动控制腿长和支撑力。更有利于重心的调整和姿态控制。
两个轮子不转的时候能走路吗?
不行。主要原因:
-
机器人侧向无法平衡。腿部的自由度不够,特别是髋缺少Roll (侧摆)关节。简单来说:走路时。
-
行走方向很难控制。髋缺少Yaw(偏转)关节,轮与地面的接触面不够,难以提供足够摩擦扭矩维持身体方向。
足式机器人未来和挑战
Handle待解决问题:
- 上台阶问题。(易解决)
- 自主移动与自主操作问题。(机器人是一个完整的系统,光有运动能力并不够,待无人车技术、人工智能技术等技术一起成熟)
- 安全性问题。(也是双足应用的最大问题和瓶颈,致命弱点。双足重心较高,稳定性不够。故障时,机器人摔倒,如何对环境的破坏和人员的伤害,基本无解)
- 强调动态平衡/稳定(Dynamics Balance/ Stability),欠缺静稳定(Static Stability)。
- 动态平衡必须实时依靠控制来完成平衡控制,一旦这种掉电或故障,控制失去,机器人就会失去平衡摔倒。
未来实用化方案:
轮腿式四足机器人。我不知道现在说这话是不是有点马后炮,不过我们在一年前就尝试轮腿式机器人,当然,我们期待spotmini的下一代。
我们在做什么?
- 打乒乓球的仿人机器人“悟”和“空”
- 地图构建与定位导航
- 2015亚马逊机器人分拣货物挑战赛(Amazon Robot Picking Challenge, 5st Place)
- 移动操作(Mobile Manipulation)
- 自主行走平衡车
- 腿式机器人


参数
-
PMSM电机
-
http://www.leiphone.com/news/201703/URrR8CG2tmtghNDl.html
-
https://blog.csdn.net/xiangz_csdn/article/details/61614364