💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
📚2 运行结果
🎉3 参考文献
🌈4 Matlab代码实现

💥1 概述
-
使用贝叶斯滤波器通过运动模型和嘈杂的墙壁传感器定位机器人是一种常见的机器人定位方法。贝叶斯滤波器是一种递归滤波器,通过将先验信息和测量信息进行融合,可以估计机器人的位置和姿态。
在这种方法中,运动模型用于预测机器人的下一个位置,考虑机器人的运动方向、速度和加速度等因素。墙壁传感器用于测量机器人与周围墙壁的距离或角度,但由于传感器噪声和不确定性,测量结果可能存在误差。
贝叶斯滤波器的基本步骤如下:
-
初始化:根据先验信息,初始化机器人的位置和姿态的概率分布。
-
运动更新:根据运动模型,预测机器人的下一个位置的概率分布。
-
测量更新:根据墙壁传感器的测量结果,更新机器人位置的概率分布。
-
融合更新:将运动更新和测量更新的概率分布进行融合,得到机器人当前位置的概率分布。
-
重采样:根据融合更新后的概率分布,进行重采样,得到机器人当前位置的估计。
-
重复步骤2-5,实现递归的定位过程。
通过不断迭代运动更新和测量更新,贝叶斯滤波器可以逐步减小定位误差,提高机器人的定位精度。然而,贝叶斯滤波器的性能也受到运动模型和传感器噪声等因素的影响,需要根据具体应用场景进行参数调整和优化。
-
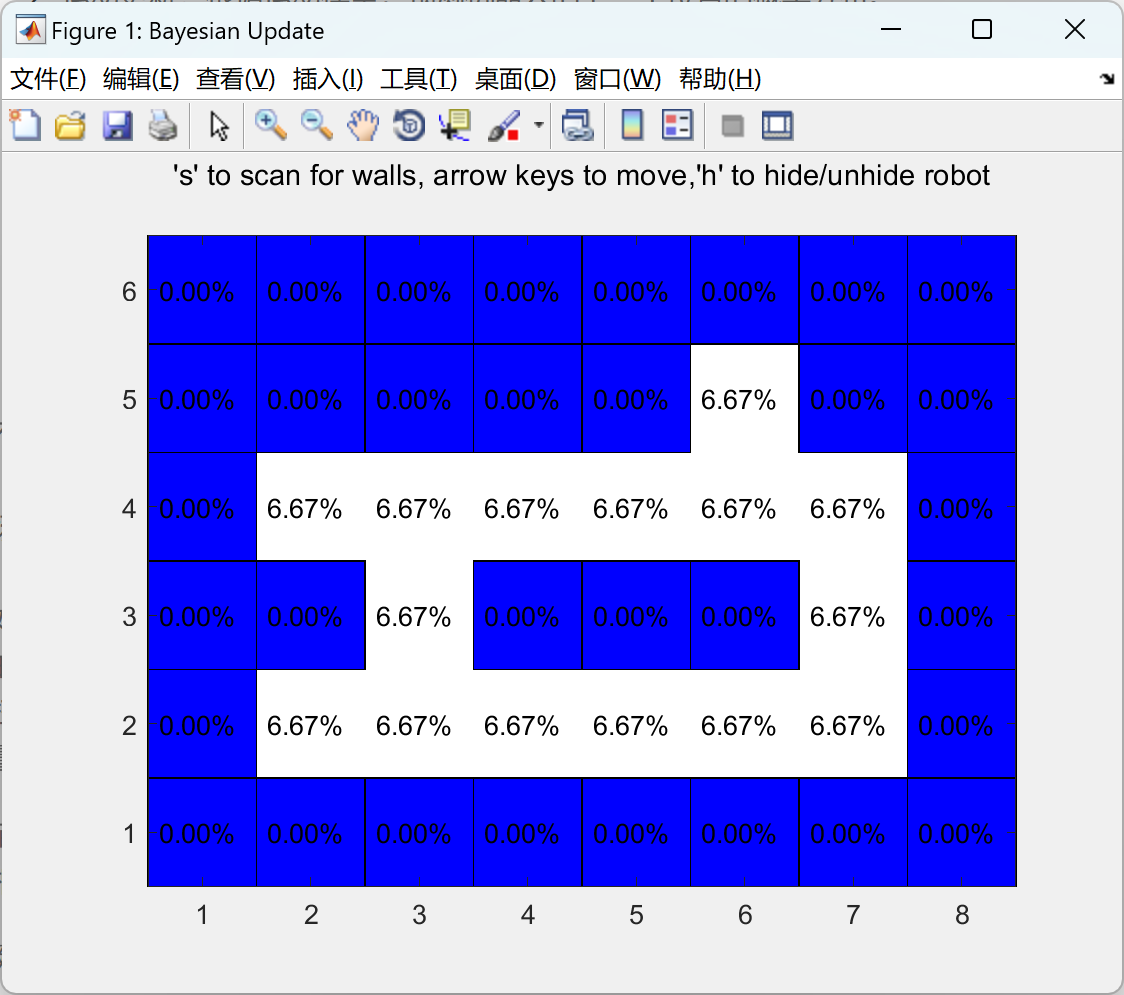
本文演示如何使用贝叶斯滤波器通过运动模型和嘈杂的墙壁传感器定位机器人。环境很简单:一个单位大小的机器人,在由障碍物或自由空间组成的网格世界中。机器人有五个动作:{左,上,右,下,扫描},用于在基本方向上移动或扫描环境。
机器人质量低下,因此概率移动,如函数 moveRobot() 中所述
同样,扫描仪质量低下。“扫描仪”近似于 4 个电容式传感器,可检测(有一定的错误概率)是否与当前单元相邻的墙壁。这在函数 applyScan() 中有所描述。
使用箭头键移动机器人。屏幕显示概率质量函数,障碍物,您可以通过按“h”键隐藏/取消隐藏机器人。
📚2 运行结果
部分代码:
%initialize motion model accuracy. The robot actuators are inaccurate
probStraight = 0.6;
profOffby90Deg = 0.1;
% initialize scanner accuracy. The scanners are imperfect
% wall no wall
% detectwall 0.8 0.4
% ~detectwall 0.2 0.6
sTruePositive = 0.8; % probability scanner detects wall if there is a wall
sTrueNegative = 0.6; % probability scanner detects no wall if no wall
%initialize robot
robotInd = ceil(rand*numFreeSpaces); %robot position drawn from a uniform distribution
posRobot = [freespacex(robotInd),freespacey(robotInd)];
posRobot = [3,2];
bShowRobot = 'off'; %should we show robot on screen? Set to 'off' or 'on'.
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
-
王晓东, 张晓东, & 陈刚. (2019). 基于贝叶斯滤波器的机器人定位方法研究. 机器人技术与应用, 38(4), 1-8.
-
张晓东, & 陈刚. (2018). 基于贝叶斯滤波器的机器人定位算法研究. 机器人技术与应用, 37(4), 1-8.
-
陈刚, 张晓东, & 王晓东. (2017). 基于贝叶斯滤波器的机器人定位研究综述. 机器人技术与应用, 36(4), 1-8.