前言
线性代数(linear algebra)是关于向量空间和线性映射的一个数学分支。它包括对线、面和子空间的研究,同时也涉及到所有的向量空间的一般性质。
本文主要介绍机器学习中所用到的线性代数核心基础概念,供读者学习阶段查漏补缺或是快速学习参考。
线性代数
行列式
1.行列式按行(列)展开定理
(1) 设 A = ( a i j ) n × n A = ( a_{{ij}} )_{n \times n} A=(aij)n×n,则: a i 1 A j 1 + a i 2 A j 2 + ⋯ + a i n A j n = { ∣ A ∣ , i = j 0 , i ≠ j a_{i1}A_{j1} +a_{i2}A_{j2} + \cdots + a_{{in}}A_{{jn}} = \begin{cases}|A|,i=j\\ 0,i \neq j\end{cases} ai1Aj1+ai2Aj2+⋯+ainAjn={∣A∣,i=j0,i=j
或 a 1 i A 1 j + a 2 i A 2 j + ⋯ + a n i A n j = { ∣ A ∣ , i = j 0 , i ≠ j a_{1i}A_{1j} + a_{2i}A_{2j} + \cdots + a_{{ni}}A_{{nj}} = \begin{cases}|A|,i=j\\ 0,i \neq j\end{cases} a1iA1j+a2iA2j+⋯+aniAnj={∣A∣,i=j0,i=j即 A A ∗ = A ∗ A = ∣ A ∣ E , AA^{*} = A^{*}A = \left| A \right|E, AA∗=A∗A=∣A∣E,其中: A ∗ = ( A 11 A 12 … A 1 n A 21 A 22 … A 2 n … … … … A n 1 A n 2 … A n n ) = ( A j i ) = ( A i j ) T A^{*} = \begin{pmatrix} A_{11} & A_{12} & \ldots & A_{1n} \\ A_{21} & A_{22} & \ldots & A_{2n} \\ \ldots & \ldots & \ldots & \ldots \\ A_{n1} & A_{n2} & \ldots & A_{{nn}} \\ \end{pmatrix} = (A_{{ji}}) = {(A_{{ij}})}^{T} A∗= A11A21…An1A12A22…An2…………A1nA2n…Ann =(Aji)=(Aij)T
D n = ∣ 1 1 … 1 x 1 x 2 … x n … … … … x 1 n − 1 x 2 n − 1 … x n n − 1 ∣ = ∏ 1 ≤ j < i ≤ n ( x i − x j ) D_{n} = \begin{vmatrix} 1 & 1 & \ldots & 1 \\ x_{1} & x_{2} & \ldots & x_{n} \\ \ldots & \ldots & \ldots & \ldots \\ x_{1}^{n - 1} & x_{2}^{n - 1} & \ldots & x_{n}^{n - 1} \\ \end{vmatrix} = \prod_{1 \leq j < i \leq n}^{}\,(x_{i} - x_{j}) Dn= 1x1…x1n−11x2…x2n−1…………1xn…xnn−1 =∏1≤j<i≤n(xi−xj)
(2) 设 A , B A,B A,B为 n n n阶方阵,则 ∣ A B ∣ = ∣ A ∣ ∣ B ∣ = ∣ B ∣ ∣ A ∣ = ∣ B A ∣ \left| {AB} \right| = \left| A \right|\left| B \right| = \left| B \right|\left| A \right| = \left| {BA} \right| ∣AB∣=∣A∣∣B∣=∣B∣∣A∣=∣BA∣,但 ∣ A ± B ∣ = ∣ A ∣ ± ∣ B ∣ \left| A \pm B \right| = \left| A \right| \pm \left| B \right| ∣A±B∣=∣A∣±∣B∣不一定成立。
(3) ∣ k A ∣ = k n ∣ A ∣ \left| {kA} \right| = k^{n}\left| A \right| ∣kA∣=kn∣A∣, A A A为 n n n阶方阵。
(4) 设 A A A为 n n n阶方阵, ∣ A T ∣ = ∣ A ∣ ; ∣ A − 1 ∣ = ∣ A ∣ − 1 |A^{T}| = |A|;|A^{- 1}| = |A|^{- 1} ∣AT∣=∣A∣;∣A−1∣=∣A∣−1(若 A A A可逆), ∣ A ∗ ∣ = ∣ A ∣ n − 1 |A^{*}| = |A|^{n - 1} ∣A∗∣=∣A∣n−1
n ≥ 2 n \geq 2 n≥2
(5) ∣ A O O B ∣ = ∣ A C O B ∣ = ∣ A O C B ∣ = ∣ A ∣ ∣ B ∣ \left| \begin{matrix} & {A\quad O} \\ & {O\quad B} \\ \end{matrix} \right| = \left| \begin{matrix} & {A\quad C} \\ & {O\quad B} \\ \end{matrix} \right| = \left| \begin{matrix} & {A\quad O} \\ & {C\quad B} \\ \end{matrix} \right| =| A||B| AOOB = ACOB = AOCB =∣A∣∣B∣
, A , B A,B A,B为方阵,但 ∣ O A m × m B n × n O ∣ = ( − 1 ) m n ∣ A ∣ ∣ B ∣ \left| \begin{matrix} {O} & A_{m \times m} \\ B_{n \times n} & { O} \\ \end{matrix} \right| = ({- 1)}^{{mn}}|A||B| OBn×nAm×mO =(−1)mn∣A∣∣B∣ 。
(6) 范德蒙行列式 D n = ∣ 1 1 … 1 x 1 x 2 … x n … … … … x 1 n − 1 x 2 n 1 … x n n − 1 ∣ = ∏ 1 ≤ j < i ≤ n ( x i − x j ) D_{n} = \begin{vmatrix} 1 & 1 & \ldots & 1 \\ x_{1} & x_{2} & \ldots & x_{n} \\ \ldots & \ldots & \ldots & \ldots \\ x_{1}^{n - 1} & x_{2}^{n 1} & \ldots & x_{n}^{n - 1} \\ \end{vmatrix} = \prod_{1 \leq j < i \leq n}^{}\,(x_{i} - x_{j}) Dn= 1x1…x1n−11x2…x2n1…………1xn…xnn−1 =∏1≤j<i≤n(xi−xj)
设 A A A是 n n n阶方阵, λ i ( i = 1 , 2 ⋯ , n ) \lambda_{i}(i = 1,2\cdots,n) λi(i=1,2⋯,n)是 A A A的 n n n个特征值,则
∣ A ∣ = ∏ i = 1 n λ i |A| = \prod_{i = 1}^{n}\lambda_{i} ∣A∣=∏i=1nλi
矩阵
矩阵: m × n m \times n m×n个数 a i j a_{{ij}} aij排成 m m m行 n n n列的表格 [ a 11 a 12 ⋯ a 1 n a 21 a 22 ⋯ a 2 n ⋯ ⋯ ⋯ ⋯ ⋯ a m 1 a m 2 ⋯ a m n ] \begin{bmatrix} a_{11}\quad a_{12}\quad\cdots\quad a_{1n} \\ a_{21}\quad a_{22}\quad\cdots\quad a_{2n} \\ \quad\cdots\cdots\cdots\cdots\cdots \\ a_{m1}\quad a_{m2}\quad\cdots\quad a_{{mn}} \\ \end{bmatrix} a11a12⋯a1na21a22⋯a2n⋯⋯⋯⋯⋯am1am2⋯amn 称为矩阵,简记为 A A A,或者 ( a i j ) m × n \left( a_{{ij}} \right)_{m \times n} (aij)m×n 。若 m = n m = n m=n,则称 A A A是 n n n阶矩阵或 n n n阶方阵。
矩阵的线性运算
1.矩阵的加法
设 A = ( a i j ) , B = ( b i j ) A = (a_{{ij}}),B = (b_{{ij}}) A=(aij),B=(bij)是两个 m × n m \times n m×n矩阵,则 m × n m \times n m×n 矩阵 C = c i j ) = a i j + b i j C = c_{{ij}}) = a_{{ij}} + b_{{ij}} C=cij)=aij+bij称为矩阵 A A A与 B B B的和,记为 A + B = C A + B = C A+B=C 。
2.矩阵的数乘
设 A = ( a i j ) A = (a_{{ij}}) A=(aij)是 m × n m \times n m×n矩阵, k k k是一个常数,则 m × n m \times n m×n矩阵 ( k a i j ) (ka_{{ij}}) (kaij)称为数 k k k与矩阵 A A A的数乘,记为 k A {kA} kA。
3.矩阵的乘法
设 A = ( a i j ) A = (a_{{ij}}) A=(aij)是 m × n m \times n m×n矩阵, B = ( b i j ) B = (b_{{ij}}) B=(bij)是 n × s n \times s n×s矩阵,那么 m × s m \times s m×s矩阵 C = ( c i j ) C = (c_{{ij}}) C=(cij),其中 c i j = a i 1 b 1 j + a i 2 b 2 j + ⋯ + a i n b n j = ∑ k = 1 n a i k b k j c_{{ij}} = a_{i1}b_{1j} + a_{i2}b_{2j} + \cdots + a_{{in}}b_{{nj}} = \sum_{k =1}^{n}{a_{{ik}}b_{{kj}}} cij=ai1b1j+ai2b2j+⋯+ainbnj=∑k=1naikbkj称为 A B {AB} AB的乘积,记为 C = A B C = AB C=AB 。
4. A T \mathbf{A}^{\mathbf{T}} AT、 A − 1 \mathbf{A}^{\mathbf{-1}} A−1、 A ∗ \mathbf{A}^{\mathbf{*}} A∗三者之间的关系
(1) ( A T ) T = A , ( A B ) T = B T A T , ( k A ) T = k A T , ( A ± B ) T = A T ± B T {(A^{T})}^{T} = A,{(AB)}^{T} = B^{T}A^{T},{(kA)}^{T} = kA^{T},{(A \pm B)}^{T} = A^{T} \pm B^{T} (AT)T=A,(AB)T=BTAT,(kA)T=kAT,(A±B)T=AT±BT
(2) ( A − 1 ) − 1 = A , ( A B ) − 1 = B − 1 A − 1 , ( k A ) − 1 = 1 k A − 1 , \left( A^{- 1} \right)^{- 1} = A,\left( {AB} \right)^{- 1} = B^{- 1}A^{- 1},\left( {kA} \right)^{- 1} = \frac{1}{k}A^{- 1}, (A−1)−1=A,(AB)−1=B−1A−1,(kA)−1=k1A−1,
但 ( A ± B ) − 1 = A − 1 ± B − 1 {(A \pm B)}^{- 1} = A^{- 1} \pm B^{- 1} (A±B)−1=A−1±B−1不一定成立。
(3) ( A ∗ ) ∗ = ∣ A ∣ n − 2 A ( n ≥ 3 ) \left( A^{*} \right)^{*} = |A|^{n - 2}\ A\ \ (n \geq 3) (A∗)∗=∣A∣n−2 A (n≥3), ( A B ) ∗ = B ∗ A ∗ , \left({AB} \right)^{*} = B^{*}A^{*}, (AB)∗=B∗A∗, ( k A ) ∗ = k n − 1 A ∗ ( n ≥ 2 ) \left( {kA} \right)^{*} = k^{n -1}A^{*}{\ \ }\left( n \geq 2 \right) (kA)∗=kn−1A∗ (n≥2)
但 ( A ± B ) ∗ = A ∗ ± B ∗ \left( A \pm B \right)^{*} = A^{*} \pm B^{*} (A±B)∗=A∗±B∗不一定成立。
(4) ( A − 1 ) T = ( A T ) − 1 , ( A − 1 ) ∗ = ( A A ∗ ) − 1 , ( A ∗ ) T = ( A T ) ∗ {(A^{- 1})}^{T} = {(A^{T})}^{- 1},\ \left( A^{- 1} \right)^{*} ={(AA^{*})}^{- 1},{(A^{*})}^{T} = \left( A^{T} \right)^{*} (A−1)T=(AT)−1, (A−1)∗=(AA∗)−1,(A∗)T=(AT)∗
5.有关 A ∗ \mathbf{A}^{\mathbf{*}} A∗的结论
(1) A A ∗ = A ∗ A = ∣ A ∣ E AA^{*} = A^{*}A = |A|E AA∗=A∗A=∣A∣E
(2) ∣ A ∗ ∣ = ∣ A ∣ n − 1 ( n ≥ 2 ) , ( k A ) ∗ = k n − 1 A ∗ , ( A ∗ ) ∗ = ∣ A ∣ n − 2 A ( n ≥ 3 ) |A^{*}| = |A|^{n - 1}\ (n \geq 2),\ \ \ \ {(kA)}^{*} = k^{n -1}A^{*},{{\ \ }\left( A^{*} \right)}^{*} = |A|^{n - 2}A(n \geq 3) ∣A∗∣=∣A∣n−1 (n≥2), (kA)∗=kn−1A∗, (A∗)∗=∣A∣n−2A(n≥3)
(3) 若 A A A可逆,则 A ∗ = ∣ A ∣ A − 1 , ( A ∗ ) ∗ = 1 ∣ A ∣ A A^{*} = |A|A^{- 1},{(A^{*})}^{*} = \frac{1}{|A|}A A∗=∣A∣A−1,(A∗)∗=∣A∣1A
(4) 若 A A A为 n n n阶方阵,则:
r ( A ∗ ) = { n , r ( A ) = n 1 , r ( A ) = n − 1 0 , r ( A ) < n − 1 r(A^*)=\begin{cases}n,\quad r(A)=n\\ 1,\quad r(A)=n-1\\ 0,\quad r(A)<n-1\end{cases} r(A∗)=⎩ ⎨ ⎧n,r(A)=n1,r(A)=n−10,r(A)<n−1
6.有关 A − 1 \mathbf{A}^{\mathbf{- 1}} A−1的结论
A A A可逆 ⇔ A B = E ; ⇔ ∣ A ∣ ≠ 0 ; ⇔ r ( A ) = n ; \Leftrightarrow AB = E; \Leftrightarrow |A| \neq 0; \Leftrightarrow r(A) = n; ⇔AB=E;⇔∣A∣=0;⇔r(A)=n;
⇔ A \Leftrightarrow A ⇔A可以表示为初等矩阵的乘积; ⇔ A ; ⇔ A x = 0 \Leftrightarrow A;\Leftrightarrow Ax = 0 ⇔A;⇔Ax=0。
7.有关矩阵秩的结论
(1) 秩 r ( A ) r(A) r(A)=行秩=列秩;
(2) r ( A m × n ) ≤ min ( m , n ) ; r(A_{m \times n}) \leq \min(m,n); r(Am×n)≤min(m,n);
(3) A ≠ 0 ⇒ r ( A ) ≥ 1 A \neq 0 \Rightarrow r(A) \geq 1 A=0⇒r(A)≥1;
(4) r ( A ± B ) ≤ r ( A ) + r ( B ) ; r(A \pm B) \leq r(A) + r(B); r(A±B)≤r(A)+r(B);
(5) 初等变换不改变矩阵的秩
(6) r ( A ) + r ( B ) − n ≤ r ( A B ) ≤ min ( r ( A ) , r ( B ) ) , r(A) + r(B) - n \leq r(AB) \leq \min(r(A),r(B)), r(A)+r(B)−n≤r(AB)≤min(r(A),r(B)),特别若 A B = O AB = O AB=O
则: r ( A ) + r ( B ) ≤ n r(A) + r(B) \leq n r(A)+r(B)≤n
(7) 若 A − 1 A^{- 1} A−1存在 ⇒ r ( A B ) = r ( B ) ; \Rightarrow r(AB) = r(B); ⇒r(AB)=r(B); 若 B − 1 B^{- 1} B−1存在
⇒ r ( A B ) = r ( A ) ; \Rightarrow r(AB) = r(A); ⇒r(AB)=r(A);
若 r ( A m × n ) = n ⇒ r ( A B ) = r ( B ) ; r(A_{m \times n}) = n \Rightarrow r(AB) = r(B); r(Am×n)=n⇒r(AB)=r(B); 若 r ( A m × s ) = n ⇒ r ( A B ) = r ( A ) r(A_{m \times s}) = n\Rightarrow r(AB) = r\left( A \right) r(Am×s)=n⇒r(AB)=r(A)。
(8) r ( A m × s ) = n ⇔ A x = 0 r(A_{m \times s}) = n \Leftrightarrow Ax = 0 r(Am×s)=n⇔Ax=0只有零解
8.分块求逆公式
( A O O B ) − 1 = ( A − 1 O O B − 1 ) \begin{pmatrix} A & O \\ O & B \\ \end{pmatrix}^{- 1} = \begin{pmatrix} A^{-1} & O \\ O & B^{- 1} \\ \end{pmatrix} (AOOB)−1=(A−1OOB−1); ( A C O B ) − 1 = ( A − 1 − A − 1 C B − 1 O B − 1 ) \begin{pmatrix} A & C \\ O & B \\\end{pmatrix}^{- 1} = \begin{pmatrix} A^{- 1}& - A^{- 1}CB^{- 1} \\ O & B^{- 1} \\ \end{pmatrix} (AOCB)−1=(A−1O−A−1CB−1B−1);
( A O C B ) − 1 = ( A − 1 O − B − 1 C A − 1 B − 1 ) \begin{pmatrix} A & O \\ C & B \\ \end{pmatrix}^{- 1} = \begin{pmatrix} A^{- 1}&{O} \\ - B^{- 1}CA^{- 1} & B^{- 1} \\\end{pmatrix} (ACOB)−1=(A−1−B−1CA−1OB−1); ( O A B O ) − 1 = ( O B − 1 A − 1 O ) \begin{pmatrix} O & A \\ B & O \\ \end{pmatrix}^{- 1} =\begin{pmatrix} O & B^{- 1} \\ A^{- 1} & O \\ \end{pmatrix} (OBAO)−1=(OA−1B−1O)
这里 A A A, B B B均为可逆方阵。
向量
1.有关向量组的线性表示
(1) α 1 , α 2 , ⋯ , α s \alpha_{1},\alpha_{2},\cdots,\alpha_{s} α1,α2,⋯,αs线性相关 ⇔ \Leftrightarrow ⇔至少有一个向量可以用其余向量线性表示。
(2) α 1 , α 2 , ⋯ , α s \alpha_{1},\alpha_{2},\cdots,\alpha_{s} α1,α2,⋯,αs线性无关, α 1 , α 2 , ⋯ , α s \alpha_{1},\alpha_{2},\cdots,\alpha_{s} α1,α2,⋯,αs, β \beta β线性相关 ⇔ β \Leftrightarrow \beta ⇔β可以由 α 1 , α 2 , ⋯ , α s \alpha_{1},\alpha_{2},\cdots,\alpha_{s} α1,α2,⋯,αs唯一线性表示。
(3) β \beta β可以由 α 1 , α 2 , ⋯ , α s \alpha_{1},\alpha_{2},\cdots,\alpha_{s} α1,α2,⋯,αs线性表示
⇔ r ( α 1 , α 2 , ⋯ , α s ) = r ( α 1 , α 2 , ⋯ , α s , β ) \Leftrightarrow r(\alpha_{1},\alpha_{2},\cdots,\alpha_{s}) =r(\alpha_{1},\alpha_{2},\cdots,\alpha_{s},\beta) ⇔r(α1,α2,⋯,αs)=r(α1,α2,⋯,αs,β) 。
2.有关向量组的线性相关性
(1)部分相关,整体相关;整体无关,部分无关.
(2) ① n n n个 n n n维向量
α 1 , α 2 ⋯ α n \alpha_{1},\alpha_{2}\cdots\alpha_{n} α1,α2⋯αn线性无关 ⇔ ∣ [ α 1 α 2 ⋯ α n ] ∣ ≠ 0 \Leftrightarrow \left|\left\lbrack \alpha_{1}\alpha_{2}\cdots\alpha_{n} \right\rbrack \right| \neq0 ⇔∣[α1α2⋯αn]∣=0, n n n个 n n n维向量 α 1 , α 2 ⋯ α n \alpha_{1},\alpha_{2}\cdots\alpha_{n} α1,α2⋯αn线性相关
⇔ ∣ [ α 1 , α 2 , ⋯ , α n ] ∣ = 0 \Leftrightarrow |\lbrack\alpha_{1},\alpha_{2},\cdots,\alpha_{n}\rbrack| = 0 ⇔∣[α1,α2,⋯,αn]∣=0
。
② n + 1 n + 1 n+1个 n n n维向量线性相关。
③ 若 α 1 , α 2 ⋯ α S \alpha_{1},\alpha_{2}\cdots\alpha_{S} α1,α2⋯αS线性无关,则添加分量后仍线性无关;或一组向量线性相关,去掉某些分量后仍线性相关。
3.有关向量组的线性表示
(1) α 1 , α 2 , ⋯ , α s \alpha_{1},\alpha_{2},\cdots,\alpha_{s} α1,α2,⋯,αs线性相关 ⇔ \Leftrightarrow ⇔至少有一个向量可以用其余向量线性表示。
(2) α 1 , α 2 , ⋯ , α s \alpha_{1},\alpha_{2},\cdots,\alpha_{s} α1,α2,⋯,αs线性无关, α 1 , α 2 , ⋯ , α s \alpha_{1},\alpha_{2},\cdots,\alpha_{s} α1,α2,⋯,αs, β \beta β线性相关 ⇔ β \Leftrightarrow\beta ⇔β 可以由 α 1 , α 2 , ⋯ , α s \alpha_{1},\alpha_{2},\cdots,\alpha_{s} α1,α2,⋯,αs唯一线性表示。
(3) β \beta β可以由 α 1 , α 2 , ⋯ , α s \alpha_{1},\alpha_{2},\cdots,\alpha_{s} α1,α2,⋯,αs线性表示
⇔ r ( α 1 , α 2 , ⋯ , α s ) = r ( α 1 , α 2 , ⋯ , α s , β ) \Leftrightarrow r(\alpha_{1},\alpha_{2},\cdots,\alpha_{s}) =r(\alpha_{1},\alpha_{2},\cdots,\alpha_{s},\beta) ⇔r(α1,α2,⋯,αs)=r(α1,α2,⋯,αs,β)
4.向量组的秩与矩阵的秩之间的关系
设 r ( A m × n ) = r r(A_{m \times n}) =r r(Am×n)=r,则 A A A的秩 r ( A ) r(A) r(A)与 A A A的行列向量组的线性相关性关系为:
(1) 若 r ( A m × n ) = r = m r(A_{m \times n}) = r = m r(Am×n)=r=m,则 A A A的行向量组线性无关。
(2) 若 r ( A m × n ) = r < m r(A_{m \times n}) = r < m r(Am×n)=r<m,则 A A A的行向量组线性相关。
(3) 若 r ( A m × n ) = r = n r(A_{m \times n}) = r = n r(Am×n)=r=n,则 A A A的列向量组线性无关。
(4) 若 r ( A m × n ) = r < n r(A_{m \times n}) = r < n r(Am×n)=r<n,则 A A A的列向量组线性相关。
5. n \mathbf{n} n维向量空间的基变换公式及过渡矩阵
若 α 1 , α 2 , ⋯ , α n \alpha_{1},\alpha_{2},\cdots,\alpha_{n} α1,α2,⋯,αn与 β 1 , β 2 , ⋯ , β n \beta_{1},\beta_{2},\cdots,\beta_{n} β1,β2,⋯,βn是向量空间 V V V的两组基,则基变换公式为:
( β 1 , β 2 , ⋯ , β n ) = ( α 1 , α 2 , ⋯ , α n ) [ c 11 c 12 ⋯ c 1 n c 21 c 22 ⋯ c 2 n ⋯ ⋯ ⋯ ⋯ c n 1 c n 2 ⋯ c n n ] = ( α 1 , α 2 , ⋯ , α n ) C (\beta_{1},\beta_{2},\cdots,\beta_{n}) = (\alpha_{1},\alpha_{2},\cdots,\alpha_{n})\begin{bmatrix} c_{11}& c_{12}& \cdots & c_{1n} \\ c_{21}& c_{22}&\cdots & c_{2n} \\ \cdots & \cdots & \cdots & \cdots \\ c_{n1}& c_{n2} & \cdots & c_{{nn}} \\\end{bmatrix} = (\alpha_{1},\alpha_{2},\cdots,\alpha_{n})C (β1,β2,⋯,βn)=(α1,α2,⋯,αn) c11c21⋯cn1c12c22⋯cn2⋯⋯⋯⋯c1nc2n⋯cnn =(α1,α2,⋯,αn)C
其中 C C C是可逆矩阵,称为由基 α 1 , α 2 , ⋯ , α n \alpha_{1},\alpha_{2},\cdots,\alpha_{n} α1,α2,⋯,αn到基 β 1 , β 2 , ⋯ , β n \beta_{1},\beta_{2},\cdots,\beta_{n} β1,β2,⋯,βn的过渡矩阵。
6.坐标变换公式
若向量 γ \gamma γ在基 α 1 , α 2 , ⋯ , α n \alpha_{1},\alpha_{2},\cdots,\alpha_{n} α1,α2,⋯,αn与基 β 1 , β 2 , ⋯ , β n \beta_{1},\beta_{2},\cdots,\beta_{n} β1,β2,⋯,βn的坐标分别是
X = ( x 1 , x 2 , ⋯ , x n ) T X = {(x_{1},x_{2},\cdots,x_{n})}^{T} X=(x1,x2,⋯,xn)T,
Y = ( y 1 , y 2 , ⋯ , y n ) T Y = \left( y_{1},y_{2},\cdots,y_{n} \right)^{T} Y=(y1,y2,⋯,yn)T 即: γ = x 1 α 1 + x 2 α 2 + ⋯ + x n α n = y 1 β 1 + y 2 β 2 + ⋯ + y n β n \gamma =x_{1}\alpha_{1} + x_{2}\alpha_{2} + \cdots + x_{n}\alpha_{n} = y_{1}\beta_{1} +y_{2}\beta_{2} + \cdots + y_{n}\beta_{n} γ=x1α1+x2α2+⋯+xnαn=y1β1+y2β2+⋯+ynβn,则向量坐标变换公式为 X = C Y X = CY X=CY 或 Y = C − 1 X Y = C^{- 1}X Y=C−1X,其中 C C C是从基 α 1 , α 2 , ⋯ , α n \alpha_{1},\alpha_{2},\cdots,\alpha_{n} α1,α2,⋯,αn到基 β 1 , β 2 , ⋯ , β n \beta_{1},\beta_{2},\cdots,\beta_{n} β1,β2,⋯,βn的过渡矩阵。
7.向量的内积
( α , β ) = a 1 b 1 + a 2 b 2 + ⋯ + a n b n = α T β = β T α (\alpha,\beta) = a_{1}b_{1} + a_{2}b_{2} + \cdots + a_{n}b_{n} = \alpha^{T}\beta = \beta^{T}\alpha (α,β)=a1b1+a2b2+⋯+anbn=αTβ=βTα
8.Schmidt 正交化
若 α 1 , α 2 , ⋯ , α s \alpha_{1},\alpha_{2},\cdots,\alpha_{s} α1,α2,⋯,αs线性无关,则可构造 β 1 , β 2 , ⋯ , β s \beta_{1},\beta_{2},\cdots,\beta_{s} β1,β2,⋯,βs使其两两正交,且 β i \beta_{i} βi仅是 α 1 , α 2 , ⋯ , α i \alpha_{1},\alpha_{2},\cdots,\alpha_{i} α1,α2,⋯,αi的线性组合 ( i = 1 , 2 , ⋯ , n ) (i= 1,2,\cdots,n) (i=1,2,⋯,n),再把 β i \beta_{i} βi单位化,记 γ i = β i ∣ β i ∣ \gamma_{i} =\frac{\beta_{i}}{\left| \beta_{i}\right|} γi=∣βi∣βi,则 γ 1 , γ 2 , ⋯ , γ i \gamma_{1},\gamma_{2},\cdots,\gamma_{i} γ1,γ2,⋯,γi是规范正交向量组。其中
β 1 = α 1 \beta_{1} = \alpha_{1} β1=α1, β 2 = α 2 − ( α 2 , β 1 ) ( β 1 , β 1 ) β 1 \beta_{2} = \alpha_{2} -\frac{(\alpha_{2},\beta_{1})}{(\beta_{1},\beta_{1})}\beta_{1} β2=α2−(β1,β1)(α2,β1)β1 , β 3 = α 3 − ( α 3 , β 1 ) ( β 1 , β 1 ) β 1 − ( α 3 , β 2 ) ( β 2 , β 2 ) β 2 \beta_{3} =\alpha_{3} - \frac{(\alpha_{3},\beta_{1})}{(\beta_{1},\beta_{1})}\beta_{1} -\frac{(\alpha_{3},\beta_{2})}{(\beta_{2},\beta_{2})}\beta_{2} β3=α3−(β1,β1)(α3,β1)β1−(β2,β2)(α3,β2)β2 ,
…
β s = α s − ( α s , β 1 ) ( β 1 , β 1 ) β 1 − ( α s , β 2 ) ( β 2 , β 2 ) β 2 − ⋯ − ( α s , β s − 1 ) ( β s − 1 , β s − 1 ) β s − 1 \beta_{s} = \alpha_{s} - \frac{(\alpha_{s},\beta_{1})}{(\beta_{1},\beta_{1})}\beta_{1} - \frac{(\alpha_{s},\beta_{2})}{(\beta_{2},\beta_{2})}\beta_{2} - \cdots - \frac{(\alpha_{s},\beta_{s - 1})}{(\beta_{s - 1},\beta_{s - 1})}\beta_{s - 1} βs=αs−(β1,β1)(αs,β1)β1−(β2,β2)(αs,β2)β2−⋯−(βs−1,βs−1)(αs,βs−1)βs−1
9.正交基及规范正交基
向量空间一组基中的向量如果两两正交,就称为正交基;若正交基中每个向量都是单位向量,就称其为规范正交基。
线性方程组
1.克莱姆法则
线性方程组 { a 11 x 1 + a 12 x 2 + ⋯ + a 1 n x n = b 1 a 21 x 1 + a 22 x 2 + ⋯ + a 2 n x n = b 2 ⋯ ⋯ ⋯ ⋯ ⋯ ⋯ ⋯ ⋯ ⋯ a n 1 x 1 + a n 2 x 2 + ⋯ + a n n x n = b n \begin{cases} a_{11}x_{1} + a_{12}x_{2} + \cdots +a_{1n}x_{n} = b_{1} \\ a_{21}x_{1} + a_{22}x_{2} + \cdots + a_{2n}x_{n} =b_{2} \\ \quad\cdots\cdots\cdots\cdots\cdots\cdots\cdots\cdots\cdots \\ a_{n1}x_{1} + a_{n2}x_{2} + \cdots + a_{{nn}}x_{n} = b_{n} \\ \end{cases} ⎩ ⎨ ⎧a11x1+a12x2+⋯+a1nxn=b1a21x1+a22x2+⋯+a2nxn=b2⋯⋯⋯⋯⋯⋯⋯⋯⋯an1x1+an2x2+⋯+annxn=bn,如果系数行列式 D = ∣ A ∣ ≠ 0 D = \left| A \right| \neq 0 D=∣A∣=0,则方程组有唯一解, x 1 = D 1 D , x 2 = D 2 D , ⋯ , x n = D n D x_{1} = \frac{D_{1}}{D},x_{2} = \frac{D_{2}}{D},\cdots,x_{n} =\frac{D_{n}}{D} x1=DD1,x2=DD2,⋯,xn=DDn,其中 D j D_{j} Dj是把 D D D中第 j j j列元素换成方程组右端的常数列所得的行列式。
2. n n n阶矩阵 A A A可逆 ⇔ A x = 0 \Leftrightarrow Ax = 0 ⇔Ax=0只有零解。 ⇔ ∀ b , A x = b \Leftrightarrow\forall b,Ax = b ⇔∀b,Ax=b总有唯一解,一般地, r ( A m × n ) = n ⇔ A x = 0 r(A_{m \times n}) = n \Leftrightarrow Ax= 0 r(Am×n)=n⇔Ax=0只有零解。
3.非奇次线性方程组有解的充分必要条件,线性方程组解的性质和解的结构
(1) 设 A A A为 m × n m \times n m×n矩阵,若 r ( A m × n ) = m r(A_{m \times n}) = m r(Am×n)=m,则对 A x = b Ax =b Ax=b而言必有 r ( A ) = r ( A ⋮ b ) = m r(A) = r(A \vdots b) = m r(A)=r(A⋮b)=m,从而 A x = b Ax = b Ax=b有解。
(2) 设 x 1 , x 2 , ⋯ x s x_{1},x_{2},\cdots x_{s} x1,x2,⋯xs为 A x = b Ax = b Ax=b的解,则 k 1 x 1 + k 2 x 2 ⋯ + k s x s k_{1}x_{1} + k_{2}x_{2}\cdots + k_{s}x_{s} k1x1+k2x2⋯+ksxs当 k 1 + k 2 + ⋯ + k s = 1 k_{1} + k_{2} + \cdots + k_{s} = 1 k1+k2+⋯+ks=1时仍为 A x = b Ax =b Ax=b的解;但当 k 1 + k 2 + ⋯ + k s = 0 k_{1} + k_{2} + \cdots + k_{s} = 0 k1+k2+⋯+ks=0时,则为 A x = 0 Ax =0 Ax=0的解。特别 x 1 + x 2 2 \frac{x_{1} + x_{2}}{2} 2x1+x2为 A x = b Ax = b Ax=b的解; 2 x 3 − ( x 1 + x 2 ) 2x_{3} - (x_{1} +x_{2}) 2x3−(x1+x2)为 A x = 0 Ax = 0 Ax=0的解。
(3) 非齐次线性方程组 A x = b {Ax} = b Ax=b无解 ⇔ r ( A ) + 1 = r ( A ‾ ) ⇔ b \Leftrightarrow r(A) + 1 =r(\overline{A}) \Leftrightarrow b ⇔r(A)+1=r(A)⇔b不能由 A A A的列向量 α 1 , α 2 , ⋯ , α n \alpha_{1},\alpha_{2},\cdots,\alpha_{n} α1,α2,⋯,αn线性表示。
4.奇次线性方程组的基础解系和通解,解空间,非奇次线性方程组的通解
(1) 齐次方程组 A x = 0 {Ax} = 0 Ax=0恒有解(必有零解)。当有非零解时,由于解向量的任意线性组合仍是该齐次方程组的解向量,因此 A x = 0 {Ax}= 0 Ax=0的全体解向量构成一个向量空间,称为该方程组的解空间,解空间的维数是 n − r ( A ) n - r(A) n−r(A),解空间的一组基称为齐次方程组的基础解系。
(2) η 1 , η 2 , ⋯ , η t \eta_{1},\eta_{2},\cdots,\eta_{t} η1,η2,⋯,ηt是 A x = 0 {Ax} = 0 Ax=0的基础解系,即:
-
η 1 , η 2 , ⋯ , η t \eta_{1},\eta_{2},\cdots,\eta_{t} η1,η2,⋯,ηt是 A x = 0 {Ax} = 0 Ax=0的解;
-
η 1 , η 2 , ⋯ , η t \eta_{1},\eta_{2},\cdots,\eta_{t} η1,η2,⋯,ηt线性无关;
-
A x = 0 {Ax} = 0 Ax=0的任一解都可以由 η 1 , η 2 , ⋯ , η t \eta_{1},\eta_{2},\cdots,\eta_{t} η1,η2,⋯,ηt线性表出.
k 1 η 1 + k 2 η 2 + ⋯ + k t η t k_{1}\eta_{1} + k_{2}\eta_{2} + \cdots + k_{t}\eta_{t} k1η1+k2η2+⋯+ktηt是 A x = 0 {Ax} = 0 Ax=0的通解,其中 k 1 , k 2 , ⋯ , k t k_{1},k_{2},\cdots,k_{t} k1,k2,⋯,kt是任意常数。
矩阵的特征值和特征向量
1.矩阵的特征值和特征向量的概念及性质
(1) 设 λ \lambda λ是 A A A的一个特征值,则 k A , a A + b E , A 2 , A m , f ( A ) , A T , A − 1 , A ∗ {kA},{aA} + {bE},A^{2},A^{m},f(A),A^{T},A^{- 1},A^{*} kA,aA+bE,A2,Am,f(A),AT,A−1,A∗有一个特征值分别为
k λ , a λ + b , λ 2 , λ m , f ( λ ) , λ , λ − 1 , ∣ A ∣ λ , {kλ},{aλ} + b,\lambda^{2},\lambda^{m},f(\lambda),\lambda,\lambda^{- 1},\frac{|A|}{\lambda}, kλ,aλ+b,λ2,λm,f(λ),λ,λ−1,λ∣A∣,且对应特征向量相同( A T A^{T} AT 例外)。
(2)若 λ 1 , λ 2 , ⋯ , λ n \lambda_{1},\lambda_{2},\cdots,\lambda_{n} λ1,λ2,⋯,λn为 A A A的 n n n个特征值,则 ∑ i = 1 n λ i = ∑ i = 1 n a i i , ∏ i = 1 n λ i = ∣ A ∣ \sum_{i= 1}^{n}\lambda_{i} = \sum_{i = 1}^{n}a_{{ii}},\prod_{i = 1}^{n}\lambda_{i}= |A| ∑i=1nλi=∑i=1naii,∏i=1nλi=∣A∣ ,从而 ∣ A ∣ ≠ 0 ⇔ A |A| \neq 0 \Leftrightarrow A ∣A∣=0⇔A没有特征值。
(3)设 λ 1 , λ 2 , ⋯ , λ s \lambda_{1},\lambda_{2},\cdots,\lambda_{s} λ1,λ2,⋯,λs为 A A A的 s s s个特征值,对应特征向量为 α 1 , α 2 , ⋯ , α s \alpha_{1},\alpha_{2},\cdots,\alpha_{s} α1,α2,⋯,αs,
若: α = k 1 α 1 + k 2 α 2 + ⋯ + k s α s \alpha = k_{1}\alpha_{1} + k_{2}\alpha_{2} + \cdots + k_{s}\alpha_{s} α=k1α1+k2α2+⋯+ksαs ,
则: A n α = k 1 A n α 1 + k 2 A n α 2 + ⋯ + k s A n α s = k 1 λ 1 n α 1 + k 2 λ 2 n α 2 + ⋯ k s λ s n α s A^{n}\alpha = k_{1}A^{n}\alpha_{1} + k_{2}A^{n}\alpha_{2} + \cdots +k_{s}A^{n}\alpha_{s} = k_{1}\lambda_{1}^{n}\alpha_{1} +k_{2}\lambda_{2}^{n}\alpha_{2} + \cdots k_{s}\lambda_{s}^{n}\alpha_{s} Anα=k1Anα1+k2Anα2+⋯+ksAnαs=k1λ1nα1+k2λ2nα2+⋯ksλsnαs 。
2.相似变换、相似矩阵的概念及性质
(1) 若 A ∼ B A \sim B A∼B,则
-
A T ∼ B T , A − 1 ∼ B − 1 , , A ∗ ∼ B ∗ A^{T} \sim B^{T},A^{- 1} \sim B^{- 1},,A^{*} \sim B^{*} AT∼BT,A−1∼B−1,,A∗∼B∗
-
∣ A ∣ = ∣ B ∣ , ∑ i = 1 n A i i = ∑ i = 1 n b i i , r ( A ) = r ( B ) |A| = |B|,\sum_{i = 1}^{n}A_{{ii}} = \sum_{i =1}^{n}b_{{ii}},r(A) = r(B) ∣A∣=∣B∣,∑i=1nAii=∑i=1nbii,r(A)=r(B)
-
∣ λ E − A ∣ = ∣ λ E − B ∣ |\lambda E - A| = |\lambda E - B| ∣λE−A∣=∣λE−B∣,对 ∀ λ \forall\lambda ∀λ成立
3.矩阵可相似对角化的充分必要条件
(1)设 A A A为 n n n阶方阵,则 A A A可对角化 ⇔ \Leftrightarrow ⇔对每个 k i k_{i} ki重根特征值 λ i \lambda_{i} λi,有 n − r ( λ i E − A ) = k i n-r(\lambda_{i}E - A) = k_{i} n−r(λiE−A)=ki
(2) 设 A A A可对角化,则由 P − 1 A P = Λ , P^{- 1}{AP} = \Lambda, P−1AP=Λ,有 A = P Λ P − 1 A = {PΛ}P^{-1} A=PΛP−1,从而 A n = P Λ n P − 1 A^{n} = P\Lambda^{n}P^{- 1} An=PΛnP−1
(3) 重要结论
-
若 A ∼ B , C ∼ D A \sim B,C \sim D A∼B,C∼D,则 [ A O O C ] ∼ [ B O O D ] \begin{bmatrix} A & O \\ O & C \\\end{bmatrix} \sim \begin{bmatrix} B & O \\ O & D \\\end{bmatrix} [AOOC]∼[BOOD].
-
若 A ∼ B A \sim B A∼B,则 f ( A ) ∼ f ( B ) , ∣ f ( A ) ∣ ∼ ∣ f ( B ) ∣ f(A) \sim f(B),\left| f(A) \right| \sim \left| f(B)\right| f(A)∼f(B),∣f(A)∣∼∣f(B)∣,其中 f ( A ) f(A) f(A)为关于 n n n阶方阵 A A A的多项式。
-
若 A A A为可对角化矩阵,则其非零特征值的个数(重根重复计算)=秩( A A A)
4.实对称矩阵的特征值、特征向量及相似对角阵
(1)相似矩阵:设 A , B A,B A,B为两个 n n n阶方阵,如果存在一个可逆矩阵 P P P,使得 B = P − 1 A P B =P^{- 1}{AP} B=P−1AP成立,则称矩阵 A A A与 B B B相似,记为 A ∼ B A \sim B A∼B。
(2)相似矩阵的性质:如果 A ∼ B A \sim B A∼B则有:
-
A T ∼ B T A^{T} \sim B^{T} AT∼BT
-
A − 1 ∼ B − 1 A^{- 1} \sim B^{- 1} A−1∼B−1 (若 A A A, B B B均可逆)
-
A k ∼ B k A^{k} \sim B^{k} Ak∼Bk ( k k k为正整数)
-
∣ λ E − A ∣ = ∣ λ E − B ∣ \left| {λE} - A \right| = \left| {λE} - B \right| ∣λE−A∣=∣λE−B∣,从而 A , B A,B A,B
有相同的特征值 -
∣ A ∣ = ∣ B ∣ \left| A \right| = \left| B \right| ∣A∣=∣B∣,从而 A , B A,B A,B同时可逆或者不可逆
-
秩 ( A ) = \left( A \right) = (A)=秩 ( B ) , ∣ λ E − A ∣ = ∣ λ E − B ∣ \left( B \right),\left| {λE} - A \right| =\left| {λE} - B \right| (B),∣λE−A∣=∣λE−B∣, A , B A,B A,B不一定相似
二次型
1. n \mathbf{n} n个变量 x 1 , x 2 , ⋯ , x n \mathbf{x}_{\mathbf{1}}\mathbf{,}\mathbf{x}_{\mathbf{2}}\mathbf{,\cdots,}\mathbf{x}_{\mathbf{n}} x1,x2,⋯,xn的二次齐次函数
f ( x 1 , x 2 , ⋯ , x n ) = ∑ i = 1 n ∑ j = 1 n a i j x i y j f(x_{1},x_{2},\cdots,x_{n}) = \sum_{i = 1}^{n}{\sum_{j =1}^{n}{a_{{ij}}x_{i}y_{j}}} f(x1,x2,⋯,xn)=∑i=1n∑j=1naijxiyj,其中 a i j = a j i ( i , j = 1 , 2 , ⋯ , n ) a_{{ij}} = a_{{ji}}(i,j =1,2,\cdots,n) aij=aji(i,j=1,2,⋯,n),称为 n n n元二次型,简称二次型. 若令 x = [ x 1 x 1 ⋮ x n ] , A = [ a 11 a 12 ⋯ a 1 n a 21 a 22 ⋯ a 2 n ⋯ ⋯ ⋯ ⋯ a n 1 a n 2 ⋯ a n n ] x = \ \begin{bmatrix}x_{1} \\ x_{1} \\ \vdots \\ x_{n} \\ \end{bmatrix},A = \begin{bmatrix} a_{11}& a_{12}& \cdots & a_{1n} \\ a_{21}& a_{22}& \cdots & a_{2n} \\ \cdots &\cdots &\cdots &\cdots \\ a_{n1}& a_{n2} & \cdots & a_{{nn}} \\\end{bmatrix} x= x1x1⋮xn ,A= a11a21⋯an1a12a22⋯an2⋯⋯⋯⋯a1na2n⋯ann ,这二次型 f f f可改写成矩阵向量形式 f = x T A x f =x^{T}{Ax} f=xTAx。其中 A A A称为二次型矩阵,因为 a i j = a j i ( i , j = 1 , 2 , ⋯ , n ) a_{{ij}} =a_{{ji}}(i,j =1,2,\cdots,n) aij=aji(i,j=1,2,⋯,n),所以二次型矩阵均为对称矩阵,且二次型与对称矩阵一一对应,并把矩阵 A A A的秩称为二次型的秩。
2.惯性定理,二次型的标准形和规范形
(1) 惯性定理
对于任一二次型,不论选取怎样的合同变换使它化为仅含平方项的标准型,其正负惯性指数与所选变换无关,这就是所谓的惯性定理。
(2) 标准形
二次型 f = ( x 1 , x 2 , ⋯ , x n ) = x T A x f = \left( x_{1},x_{2},\cdots,x_{n} \right) =x^{T}{Ax} f=(x1,x2,⋯,xn)=xTAx经过合同变换 x = C y x = {Cy} x=Cy化为 f = x T A x = y T C T A C f = x^{T}{Ax} =y^{T}C^{T}{AC} f=xTAx=yTCTAC
y = ∑ i = 1 r d i y i 2 y = \sum_{i = 1}^{r}{d_{i}y_{i}^{2}} y=∑i=1rdiyi2称为 f ( r ≤ n ) f(r \leq n) f(r≤n)的标准形。在一般的数域内,二次型的标准形不是唯一的,与所作的合同变换有关,但系数不为零的平方项的个数由 r ( A ) r(A) r(A)唯一确定。
(3) 规范形
任一实二次型 f f f都可经过合同变换化为规范形 f = z 1 2 + z 2 2 + ⋯ z p 2 − z p + 1 2 − ⋯ − z r 2 f = z_{1}^{2} + z_{2}^{2} + \cdots z_{p}^{2} - z_{p + 1}^{2} - \cdots -z_{r}^{2} f=z12+z22+⋯zp2−zp+12−⋯−zr2,其中 r r r为 A A A的秩, p p p为正惯性指数, r − p r -p r−p为负惯性指数,且规范型唯一。
3.用正交变换和配方法化二次型为标准形,二次型及其矩阵的正定性
设 A A A正定 ⇒ k A ( k > 0 ) , A T , A − 1 , A ∗ \Rightarrow {kA}(k > 0),A^{T},A^{- 1},A^{*} ⇒kA(k>0),AT,A−1,A∗正定; ∣ A ∣ > 0 |A| >0 ∣A∣>0, A A A可逆; a i i > 0 a_{{ii}} > 0 aii>0,且 ∣ A i i ∣ > 0 |A_{{ii}}| > 0 ∣Aii∣>0
A A A, B B B正定 ⇒ A + B \Rightarrow A +B ⇒A+B正定,但 A B {AB} AB, B A {BA} BA不一定正定
A A A正定 ⇔ f ( x ) = x T A x > 0 , ∀ x ≠ 0 \Leftrightarrow f(x) = x^{T}{Ax} > 0,\forall x \neq 0 ⇔f(x)=xTAx>0,∀x=0
⇔ A \Leftrightarrow A ⇔A的各阶顺序主子式全大于零
⇔ A \Leftrightarrow A ⇔A的所有特征值大于零
⇔ A \Leftrightarrow A ⇔A的正惯性指数为 n n n
⇔ \Leftrightarrow ⇔存在可逆阵 P P P使 A = P T P A = P^{T}P A=PTP
⇔ \Leftrightarrow ⇔存在正交矩阵 Q Q Q,使 Q T A Q = Q − 1 A Q = ( λ 1 ⋱ λ n ) , Q^{T}{AQ} = Q^{- 1}{AQ} =\begin{pmatrix} \lambda_{1} & & \\ \begin{matrix} & \\ & \\ \end{matrix} &\ddots & \\ & & \lambda_{n} \\ \end{pmatrix}, QTAQ=Q−1AQ= λ1⋱λn ,
其中 λ i > 0 , i = 1 , 2 , ⋯ , n . \lambda_{i} > 0,i = 1,2,\cdots,n. λi>0,i=1,2,⋯,n.正定 ⇒ k A ( k > 0 ) , A T , A − 1 , A ∗ \Rightarrow {kA}(k >0),A^{T},A^{- 1},A^{*} ⇒kA(k>0),AT,A−1,A∗正定; ∣ A ∣ > 0 , A |A| > 0,A ∣A∣>0,A可逆; a i i > 0 a_{{ii}} >0 aii>0,且 ∣ A i i ∣ > 0 |A_{{ii}}| > 0 ∣Aii∣>0 。
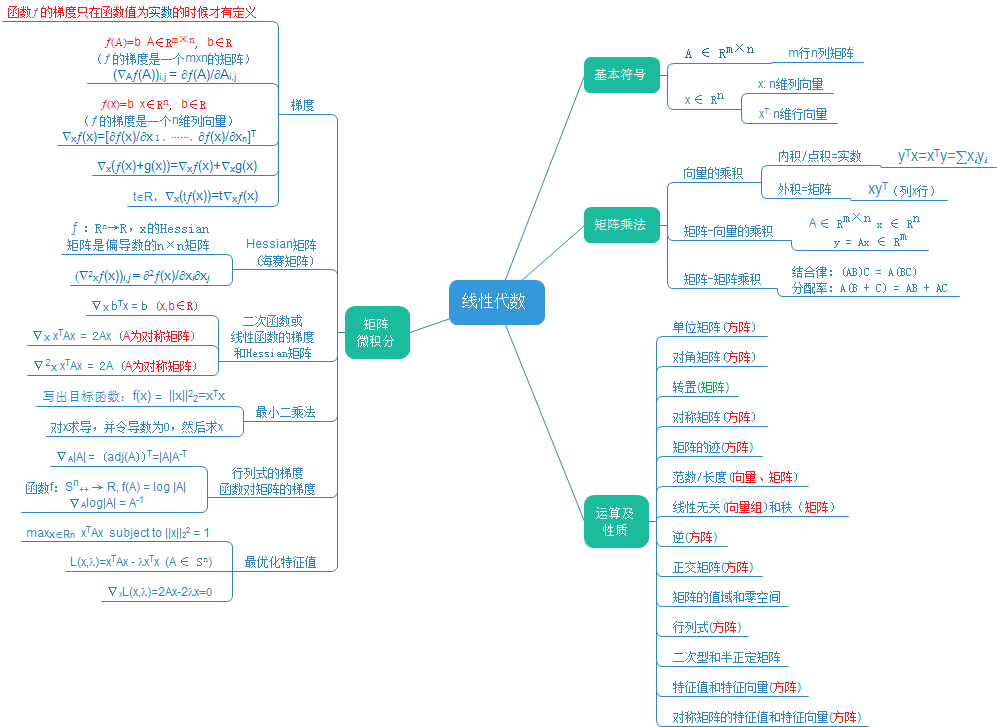
总体框架
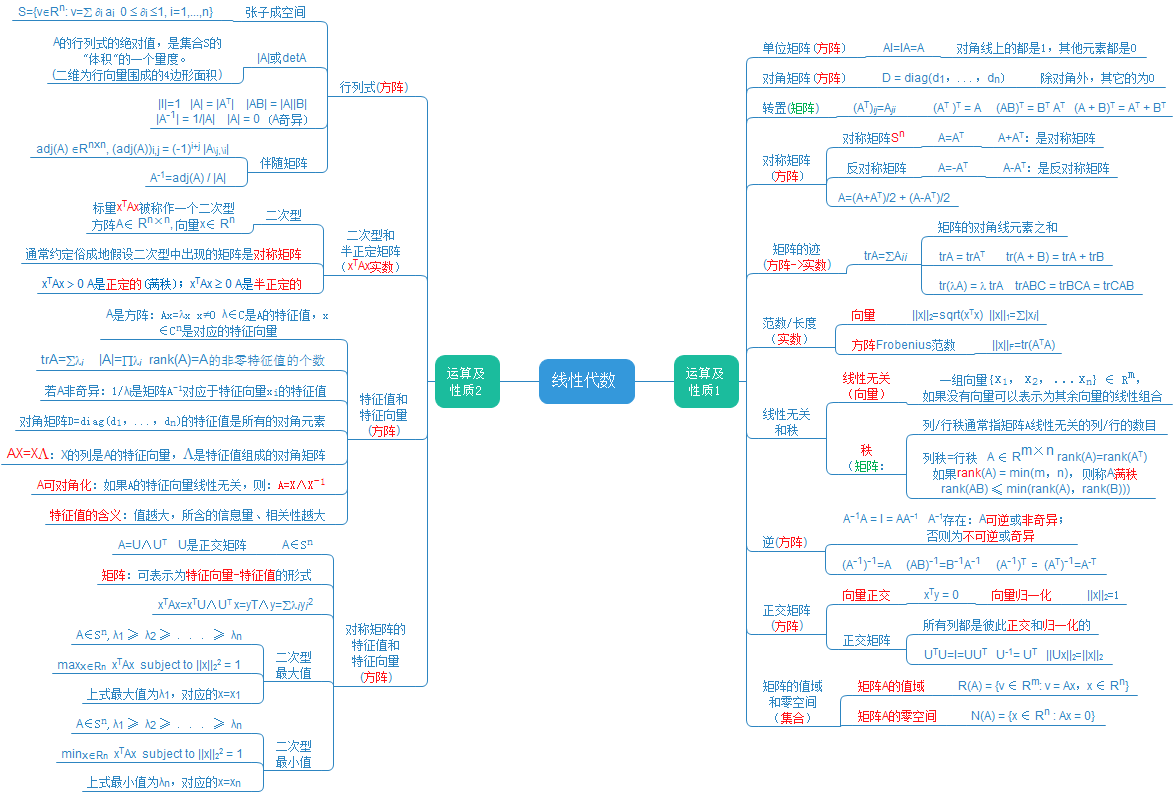
运算性质
参考文章
机器学习的线性代数基础概念 · 机器学习数学基础 (itdiffer.com)
机器学习中的线性代数 - 知乎 (zhihu.com)
线性代数基本知识-思维导图_线性代数思维导图_Arrow的博客-CSDN博客
推荐阅读
【机器学习的数学基础】(一)线性代数(Linear Algebra)(上)_linear algebra for everyone csdn_二进制人工智能的博客-CSDN博客
【机器学习的数学基础】(二)线性代数(Linear Algebra)(中)_二进制人工智能的博客-CSDN博客
【机器学习的数学基础】(三)线性代数(Linear Algebra)(下)_ordered basis线代_二进制人工智能的博客-CSDN博客
考研线性代数最全知识点梳理思维导图 - 知乎 (zhihu.com)
LQLab: Coding Learning Writing — LQLab
本文由博客一文多发平台 OpenWrite 发布!