前言
涵盖之前文章:
- Clion开发STM32之HAL库SPI封装(基础库)
W25Q64驱动
头文件
#ifndef F1XX_TEMPLATE_MODULE_W25Q64_H
#define F1XX_TEMPLATE_MODULE_W25Q64_H#include "sys_core.h"
/* Private typedef -----------------------------------------------------------*/
//#define sFLASH_ID 0xEF3015 //W25X16
//#define sFLASH_ID 0xEF4015 //W25Q16
#define sFLASH_ID 0XEF4017 //W25Q64
//#define sFLASH_ID 0XEF4018 //W25Q128
//#define SPI_FLASH_PageSize 4096
#define SPI_FLASH_PageSize 256
#define SPI_FLASH_PerWritePageSize 256/* Private define ------------------------------------------------------------*/
/*命令定义-开头*******************************/
#define W25X_WriteEnable 0x06
#define W25X_WriteDisable 0x04
#define W25X_ReadStatusReg 0x05
#define W25X_WriteStatusReg 0x01
#define W25X_ReadData 0x03
#define W25X_FastReadData 0x0B
#define W25X_FastReadDual 0x3B
#define W25X_PageProgram 0x02
#define W25X_BlockErase 0xD8
#define W25X_SectorErase 0x20
#define W25X_ChipErase 0xC7
#define W25X_PowerDown 0xB9
#define W25X_ReleasePowerDown 0xAB
#define W25X_DeviceID 0xAB
#define W25X_ManufactDeviceID 0x90
#define W25X_JedecDeviceID 0x9F
#define WIP_Flag 0x01 /* Write In Progress (WIP) flag */
#define Dummy_Byte 0xFF
/*等待超时时间*/
#define SPIT_FLAG_TIMEOUT ((uint32_t)0x5000)
#define SPIT_LONG_TIMEOUT ((uint32_t)(10 * SPIT_FLAG_TIMEOUT))/*** @memberof driver_init 驱动初始化* @memberof cs_low 使能低* @memberof cs_high 使能高* @memberof send_and_rec 发送并接收*/
typedef struct {void (*driver_init)(void);void (*cs_low)(void);void (*cs_high)(void);uint8_t (*send_and_rec)(uint8_t dat);} W25Q64_cnf_t;void W25Q64_cnf_set(W25Q64_cnf_t *cnf);bool W25Q64_Init(void);void SPI_FLASH_SectorErase(uint32_t SectorAddr);void SPI_FLASH_BulkErase(void);void SPI_FLASH_PageWrite(uint8_t *pBuffer, uint32_t WriteAddr, uint16_t NumByteToWrite);void SPI_FLASH_BufferWrite(uint8_t *pBuffer, uint32_t WriteAddr, uint16_t NumByteToWrite);void SPI_FLASH_BufferRead(uint8_t *pBuffer, uint32_t ReadAddr, uint16_t NumByteToRead);uint32_t SPI_FLASH_ReadID(void);uint32_t SPI_FLASH_ReadDeviceID(void);void SPI_FLASH_StartReadSequence(uint32_t ReadAddr);void SPI_Flash_PowerDown(void);void SPI_Flash_WAKEUP(void);uint8_t SPI_FLASH_ReadByte(void);uint8_t SPI_FLASH_SendByte(uint8_t byte);void SPI_FLASH_WriteEnable(void);void SPI_FLASH_WaitForWriteEnd(void);uint16_t SPI_TIMEOUT_UserCallback(uint8_t errorCode);#endif //F1XX_TEMPLATE_MODULE_W25Q64_H源文件
#include "w25q64/module_w25q64.h"#define DBG_ENABLE
#define DBG_SECTION_NAME "w25q64"
#define DBG_LEVEL DBG_LOG // DBG_LOG DBG_INFO DBG_WARNING DBG_ERROR#include "sys_dbg.h"static W25Q64_cnf_t *cnf_ptr = NULL;
#define SPI_FLASH_CS_LOW cnf_ptr->cs_low
#define SPI_FLASH_CS_HIGH cnf_ptr->cs_high
static volatile uint32_t SPITimeout = SPIT_LONG_TIMEOUT;void W25Q64_cnf_set(W25Q64_cnf_t *cnf) {cnf_ptr = cnf;
}bool W25Q64_Init(void) {if (cnf_ptr == NULL) return false;cnf_ptr->driver_init();/*驱动初始化*/SPI_Flash_WAKEUP();/*唤醒*/SPI_FLASH_ReadDeviceID();if (SPI_FLASH_ReadID() == sFLASH_ID) {return true;}return false;
}/*** @brief 擦除FLASH扇区* @param SectorAddr:要擦除的扇区地址* @retval 无*/
void SPI_FLASH_SectorErase(uint32_t SectorAddr) {/* 发送FLASH写使能命令 */SPI_FLASH_WriteEnable();SPI_FLASH_WaitForWriteEnd();/* 擦除扇区 *//* 选择FLASH: CS低电平 */SPI_FLASH_CS_LOW();/* 发送扇区擦除指令*/SPI_FLASH_SendByte(W25X_SectorErase);/*发送擦除扇区地址的高位*/SPI_FLASH_SendByte((SectorAddr & 0xFF0000) >> 16);/* 发送擦除扇区地址的中位 */SPI_FLASH_SendByte((SectorAddr & 0xFF00) >> 8);/* 发送擦除扇区地址的低位 */SPI_FLASH_SendByte(SectorAddr & 0xFF);/* 停止信号 FLASH: CS 高电平 */SPI_FLASH_CS_HIGH();/* 等待擦除完毕*/SPI_FLASH_WaitForWriteEnd();
}/*** @brief 擦除FLASH扇区,整片擦除* @param 无* @retval 无*/
void SPI_FLASH_BulkErase(void) {/* 发送FLASH写使能命令 */SPI_FLASH_WriteEnable();/* 整块 Erase *//* 选择FLASH: CS低电平 */SPI_FLASH_CS_LOW();/* 发送整块擦除指令*/SPI_FLASH_SendByte(W25X_ChipErase);/* 停止信号 FLASH: CS 高电平 */SPI_FLASH_CS_HIGH();/* 等待擦除完毕*/SPI_FLASH_WaitForWriteEnd();
}/*** @brief 对FLASH按页写入数据,调用本函数写入数据前需要先擦除扇区* @param pBuffer,要写入数据的指针* @param WriteAddr,写入地址* @param NumByteToWrite,写入数据长度,必须小于等于SPI_FLASH_PerWritePageSize* @retval 无*/
void SPI_FLASH_PageWrite(uint8_t *pBuffer, uint32_t WriteAddr, uint16_t NumByteToWrite) {/* 发送FLASH写使能命令 */SPI_FLASH_WriteEnable();/* 选择FLASH: CS低电平 */SPI_FLASH_CS_LOW();/* 写页写指令*/SPI_FLASH_SendByte(W25X_PageProgram);/*发送写地址的高位*/SPI_FLASH_SendByte((WriteAddr & 0xFF0000) >> 16);/*发送写地址的中位*/SPI_FLASH_SendByte((WriteAddr & 0xFF00) >> 8);/*发送写地址的低位*/SPI_FLASH_SendByte(WriteAddr & 0xFF);if (NumByteToWrite > SPI_FLASH_PerWritePageSize) {NumByteToWrite = SPI_FLASH_PerWritePageSize;LOG_E("SPI_FLASH_PageWrite too large!");}/* 写入数据*/while (NumByteToWrite--) {/* 发送当前要写入的字节数据 */SPI_FLASH_SendByte(*pBuffer);/* 指向下一字节数据 */pBuffer++;}/* 停止信号 FLASH: CS 高电平 */SPI_FLASH_CS_HIGH();/* 等待写入完毕*/SPI_FLASH_WaitForWriteEnd();
}/*** @brief 对FLASH写入数据,调用本函数写入数据前需要先擦除扇区* @param pBuffer,要写入数据的指针* @param WriteAddr,写入地址* @param NumByteToWrite,写入数据长度* @retval 无*/
void SPI_FLASH_BufferWrite(uint8_t *pBuffer, uint32_t WriteAddr, uint16_t NumByteToWrite) {uint8_t NumOfPage = 0, NumOfSingle = 0, Addr = 0, count = 0, temp = 0;/*mod运算求余,若writeAddr是SPI_FLASH_PageSize整数倍,运算结果Addr值为0*/Addr = WriteAddr % SPI_FLASH_PageSize;/*差count个数据值,刚好可以对齐到页地址*/count = SPI_FLASH_PageSize - Addr;/*计算出要写多少整数页*/NumOfPage = NumByteToWrite / SPI_FLASH_PageSize;/*mod运算求余,计算出剩余不满一页的字节数*/NumOfSingle = NumByteToWrite % SPI_FLASH_PageSize;/* Addr=0,则WriteAddr 刚好按页对齐 aligned */if (Addr == 0) {/* NumByteToWrite < SPI_FLASH_PageSize */if (NumOfPage == 0) {SPI_FLASH_PageWrite(pBuffer, WriteAddr, NumByteToWrite);} else /* NumByteToWrite > SPI_FLASH_PageSize */{/*先把整数页都写了*/while (NumOfPage--) {SPI_FLASH_PageWrite(pBuffer, WriteAddr, SPI_FLASH_PageSize);WriteAddr += SPI_FLASH_PageSize;pBuffer += SPI_FLASH_PageSize;}/*若有多余的不满一页的数据,把它写完*/SPI_FLASH_PageWrite(pBuffer, WriteAddr, NumOfSingle);}}/* 若地址与 SPI_FLASH_PageSize 不对齐 */else {/* NumByteToWrite < SPI_FLASH_PageSize */if (NumOfPage == 0) {/*当前页剩余的count个位置比NumOfSingle小,写不完*/if (NumOfSingle > count) {temp = NumOfSingle - count;/*先写满当前页*/SPI_FLASH_PageWrite(pBuffer, WriteAddr, count);WriteAddr += count;pBuffer += count;/*再写剩余的数据*/SPI_FLASH_PageWrite(pBuffer, WriteAddr, temp);} else /*当前页剩余的count个位置能写完NumOfSingle个数据*/{SPI_FLASH_PageWrite(pBuffer, WriteAddr, NumByteToWrite);}} else /* NumByteToWrite > SPI_FLASH_PageSize */{/*地址不对齐多出的count分开处理,不加入这个运算*/NumByteToWrite -= count;NumOfPage = NumByteToWrite / SPI_FLASH_PageSize;NumOfSingle = NumByteToWrite % SPI_FLASH_PageSize;SPI_FLASH_PageWrite(pBuffer, WriteAddr, count);WriteAddr += count;pBuffer += count;/*把整数页都写了*/while (NumOfPage--) {SPI_FLASH_PageWrite(pBuffer, WriteAddr, SPI_FLASH_PageSize);WriteAddr += SPI_FLASH_PageSize;pBuffer += SPI_FLASH_PageSize;}/*若有多余的不满一页的数据,把它写完*/if (NumOfSingle != 0) {SPI_FLASH_PageWrite(pBuffer, WriteAddr, NumOfSingle);}}}
}/*** @brief 读取FLASH数据* @param pBuffer,存储读出数据的指针* @param ReadAddr,读取地址* @param NumByteToRead,读取数据长度* @retval 无*/
void SPI_FLASH_BufferRead(uint8_t *pBuffer, uint32_t ReadAddr, uint16_t NumByteToRead) {/* 选择FLASH: CS低电平 */SPI_FLASH_CS_LOW();/* 发送 读 指令 */SPI_FLASH_SendByte(W25X_ReadData);/* 发送 读 地址高位 */SPI_FLASH_SendByte((ReadAddr & 0xFF0000) >> 16);/* 发送 读 地址中位 */SPI_FLASH_SendByte((ReadAddr & 0xFF00) >> 8);/* 发送 读 地址低位 */SPI_FLASH_SendByte(ReadAddr & 0xFF);/* 读取数据 */while (NumByteToRead--) {/* 读取一个字节*/*pBuffer = SPI_FLASH_SendByte(Dummy_Byte);/* 指向下一个字节缓冲区 */pBuffer++;}/* 停止信号 FLASH: CS 高电平 */SPI_FLASH_CS_HIGH();
}/*** @brief 读取FLASH ID* @param 无* @retval FLASH ID*/
uint32_t SPI_FLASH_ReadID(void) {uint32_t Temp = 0, Temp0 = 0, Temp1 = 0, Temp2 = 0;/* 开始通讯:CS低电平 */SPI_FLASH_CS_LOW();/* 发送JEDEC指令,读取ID */SPI_FLASH_SendByte(W25X_JedecDeviceID);/* 读取一个字节数据 */Temp0 = SPI_FLASH_SendByte(Dummy_Byte);/* 读取一个字节数据 */Temp1 = SPI_FLASH_SendByte(Dummy_Byte);/* 读取一个字节数据 */Temp2 = SPI_FLASH_SendByte(Dummy_Byte);/* 停止通讯:CS高电平 */SPI_FLASH_CS_HIGH();/*把数据组合起来,作为函数的返回值*/Temp = (Temp0 << 16) | (Temp1 << 8) | Temp2;return Temp;
}/*** @brief 读取FLASH Device ID* @param 无* @retval FLASH Device ID*/
uint32_t SPI_FLASH_ReadDeviceID(void) {uint32_t Temp = 0;/* Select the FLASH: Chip Select low */SPI_FLASH_CS_LOW();/* Send "RDID " instruction */SPI_FLASH_SendByte(W25X_DeviceID);SPI_FLASH_SendByte(Dummy_Byte);SPI_FLASH_SendByte(Dummy_Byte);SPI_FLASH_SendByte(Dummy_Byte);/* Read a byte from the FLASH */Temp = SPI_FLASH_SendByte(Dummy_Byte);/* Deselect the FLASH: Chip Select high */SPI_FLASH_CS_HIGH();return Temp;
}/*******************************************************************************
* Function Name : SPI_FLASH_StartReadSequence
* Description : Initiates a read data byte (READ) sequence from the Flash.
* This is done by driving the /CS line low to select the device,
* then the READ instruction is transmitted followed by 3 bytes
* address. This function exit and keep the /CS line low, so the
* Flash still being selected. With this technique the whole
* content of the Flash is read with a single READ instruction.
* Input : - ReadAddr : FLASH's internal address to read from.
* Output : None
* Return : None
*******************************************************************************/
void SPI_FLASH_StartReadSequence(uint32_t ReadAddr) {/* Select the FLASH: Chip Select low */SPI_FLASH_CS_LOW();/* Send "Read from Memory " instruction */SPI_FLASH_SendByte(W25X_ReadData);/* Send the 24-bit address of the address to read from -----------------------*//* Send ReadAddr high nibble address byte */SPI_FLASH_SendByte((ReadAddr & 0xFF0000) >> 16);/* Send ReadAddr medium nibble address byte */SPI_FLASH_SendByte((ReadAddr & 0xFF00) >> 8);/* Send ReadAddr low nibble address byte */SPI_FLASH_SendByte(ReadAddr & 0xFF);
}/*** @brief 使用SPI读取一个字节的数据* @param 无* @retval 返回接收到的数据*/
uint8_t SPI_FLASH_ReadByte(void) {return (SPI_FLASH_SendByte(Dummy_Byte));
}/*** @brief 使用SPI发送一个字节的数据* @param byte:要发送的数据* @retval 返回接收到的数据*/
uint8_t SPI_FLASH_SendByte(uint8_t byte) {return cnf_ptr->send_and_rec(byte);
// SPITimeout = SPIT_FLAG_TIMEOUT;
//
// /* 等待发送缓冲区为空,TXE事件 */
// while (__HAL_SPI_GET_FLAG(&SpiHandle, SPI_FLAG_TXE) == RESET) {
// if ((SPITimeout--) == 0) return SPI_TIMEOUT_UserCallback(0);
// }
//
// /* 写入数据寄存器,把要写入的数据写入发送缓冲区 */
// WRITE_REG(SpiHandle.Instance->DR, byte);
//
// SPITimeout = SPIT_FLAG_TIMEOUT;
//
// /* 等待接收缓冲区非空,RXNE事件 */
// while (__HAL_SPI_GET_FLAG(&SpiHandle, SPI_FLAG_RXNE) == RESET) {
// if ((SPITimeout--) == 0) return SPI_TIMEOUT_UserCallback(1);
// }
//
// /* 读取数据寄存器,获取接收缓冲区数据 */
// return READ_REG(SpiHandle.Instance->DR);
}/*** @brief 向FLASH发送 写使能 命令* @param none* @retval none*/
void SPI_FLASH_WriteEnable(void) {/* 通讯开始:CS低 */SPI_FLASH_CS_LOW();/* 发送写使能命令*/SPI_FLASH_SendByte(W25X_WriteEnable);/*通讯结束:CS高 */SPI_FLASH_CS_HIGH();
}/*** @brief 等待WIP(BUSY)标志被置0,即等待到FLASH内部数据写入完毕* @param none* @retval none*/
void SPI_FLASH_WaitForWriteEnd(void) {uint8_t FLASH_Status = 0;/* 选择 FLASH: CS 低 */SPI_FLASH_CS_LOW();/* 发送 读状态寄存器 命令 */SPI_FLASH_SendByte(W25X_ReadStatusReg);SPITimeout = SPIT_FLAG_TIMEOUT;/* 若FLASH忙碌,则等待 */do {/* 读取FLASH芯片的状态寄存器 */FLASH_Status = SPI_FLASH_SendByte(Dummy_Byte);{if ((SPITimeout--) == 0) {SPI_TIMEOUT_UserCallback(4);return;}}} while ((FLASH_Status & WIP_Flag) == 1); /* 正在写入标志 *//* 停止信号 FLASH: CS 高 */SPI_FLASH_CS_HIGH();
}//进入掉电模式
void SPI_Flash_PowerDown(void) {/* 选择 FLASH: CS 低 */SPI_FLASH_CS_LOW();/* 发送 掉电 命令 */SPI_FLASH_SendByte(W25X_PowerDown);/* 停止信号 FLASH: CS 高 */SPI_FLASH_CS_HIGH();
}//唤醒
void SPI_Flash_WAKEUP(void) {/*选择 FLASH: CS 低 */SPI_FLASH_CS_LOW();/* 发上 上电 命令 */SPI_FLASH_SendByte(W25X_ReleasePowerDown);/* 停止信号 FLASH: CS 高 */SPI_FLASH_CS_HIGH(); //等待TRES1
}/*** @brief 等待超时回调函数* @param None.* @retval None.*/
uint16_t SPI_TIMEOUT_UserCallback(uint8_t errorCode) {/* 等待超时后的处理,输出错误信息 */LOG_E("%s!errorCode = %d", FILENAME_, errorCode);return 0;
}测试配置
#include "app_conf.h"#define APP_CONF_ENABLE_W25Q64_CNF (1)
#if APP_CONF_ENABLE_W25Q64_CNF#include "w25q64/module_w25q64.h"#define DBG_ENABLE
#define DBG_SECTION_NAME "W25Q64_CNF"
#define DBG_LEVEL DBG_LOG // DBG_LOG DBG_INFO DBG_WARNING DBG_ERROR#include "sys_dbg.h"
#include "stdio.h"#define FLASH_WriteAddress 0x00000
#define FLASH_ReadAddress FLASH_WriteAddress
#define FLASH_SectorToErase FLASH_WriteAddress
/* 获取缓冲区的长度 */
#define countof(a) (sizeof(a) / sizeof(*(a)))
#define BufferSize (countof(Tx_Buffer)-1)uint8_t Tx_Buffer[] = "asdafwer ijfsifhnsow das";
uint8_t Rx_Buffer[BufferSize];
__IO uint32_t FlashID = 0;
/*-********************************************W25Q64_CNF变量定义******************************************-*/
static stm_pin_define_t *w25q64_cs = NULL;
static SPI_HandleTypeDef *w25q64_spi = NULL;
static W25Q64_cnf_t w25q64_cnf;static void w25q64_cs_high(void) { stm32_pin_define_high(w25q64_cs); }static void w25q64_cs_low(void) { stm32_pin_define_low(w25q64_cs); }static void w25q64_driver_init(void);static uint8_t w25q64_send(uint8_t dat);/*-********************************************W25Q64_CNF_pre_init******************************************-*/
static void W25Q64_CNF_pre_init() {w25q64_cs = stm_get_pin(PC0);w25q64_spi = handle_get_by_id(spi1_id);/*这里可以换成自定义spi句柄*/w25q64_cnf.cs_high = w25q64_cs_high;w25q64_cnf.cs_low = w25q64_cs_low;w25q64_cnf.send_and_rec = w25q64_send;w25q64_cnf.driver_init = w25q64_driver_init;W25Q64_cnf_set(&w25q64_cnf);
}sys_pre_init_export(W25Q64_CNF, W25Q64_CNF_pre_init);/*-********************************************W25Q64_CNF_init******************************************-*/
static void W25Q64_CNF_init() {if (W25Q64_Init()) {FlashID = sFLASH_ID;LOG_D("FILE: %s", FILENAME_);}float num = MIN3_(1.3f, 2.3f, 4.3f);LOG_D("MIN %f", num);
}sys_init_export(W25Q64_CNF, W25Q64_CNF_init);/*-***********************************************W25Q64_CNF_after_init***************************************-*/
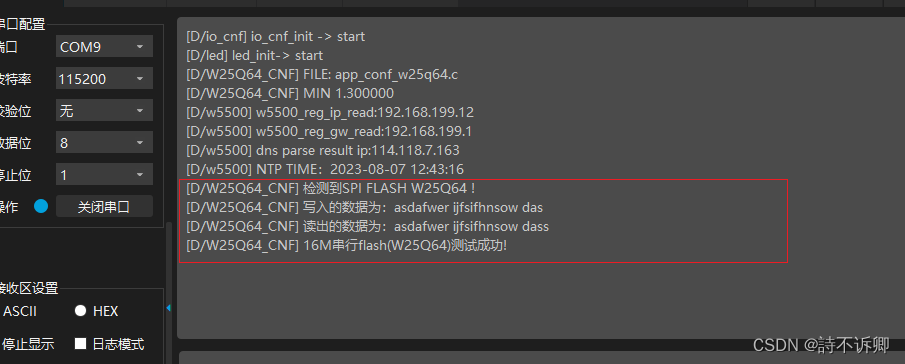
static void W25Q64_CNF_after_init() {/* 获取 Flash Device ID */if (FlashID == sFLASH_ID) {LOG_D("检测到SPI FLASH W25Q64 !");/* 擦除将要写入的 SPI FLASH 扇区,FLASH写入前要先擦除 */SPI_FLASH_SectorErase(FLASH_SectorToErase);/* 将发送缓冲区的数据写到flash中 */SPI_FLASH_BufferWrite(Tx_Buffer, FLASH_WriteAddress, BufferSize);LOG_D("写入的数据为:%s", Tx_Buffer);/* 将刚刚写入的数据读出来放到接收缓冲区中 */SPI_FLASH_BufferRead(Rx_Buffer, FLASH_ReadAddress, BufferSize);LOG_D("读出的数据为:%s", Rx_Buffer);/* 检查写入的数据与读出的数据是否相等 */if (0 == cmp_data(Tx_Buffer, Rx_Buffer, BufferSize)) {LOG_D("16M串行flash(W25Q64)测试成功!");} else {LOG_D("\r\n16M串行flash(W25Q64)测试失败!\n\r");}} else {LOG_D("\r\n获取不到 W25Q64 ID!\n\r");}/*进入掉电模式*/SPI_Flash_PowerDown();
}sys_after_init_export(W25Q64_CNF, W25Q64_CNF_after_init);/*-**************************************W25Q64_CNF内部使用************************************************-*/
static void w25q64_driver_init(void) {/**模式3 CPOL:1,CPHA:1 ; 时钟空闲状态为(高电平),在第二个时钟边沿采数据(时钟上升沿采数据)*/bsp_SpiHandleInit(w25q64_spi, SPI_BAUDRATEPRESCALER_8, spi_mode_3);/*cs 配置*/stm32_pin_define_mode_set(w25q64_cs, pin_mode_output);
}static uint8_t w25q64_send(uint8_t data) {static uint8_t readData = 0;HAL_StatusTypeDef status = HAL_SPI_TransmitReceive(w25q64_spi, &data, &readData, 1, HAL_MAX_DELAY);if (status != HAL_OK) {LOG_E("w25q64_send ERR:%#x", status);return 0;}return readData;
}#endif //APP_CONF_ENABLE_W25Q64_CNF
结果