比起单目初始化,而双目实现地图的初始化非常简单,只需要一帧(左右目图像)即可完成初始化。
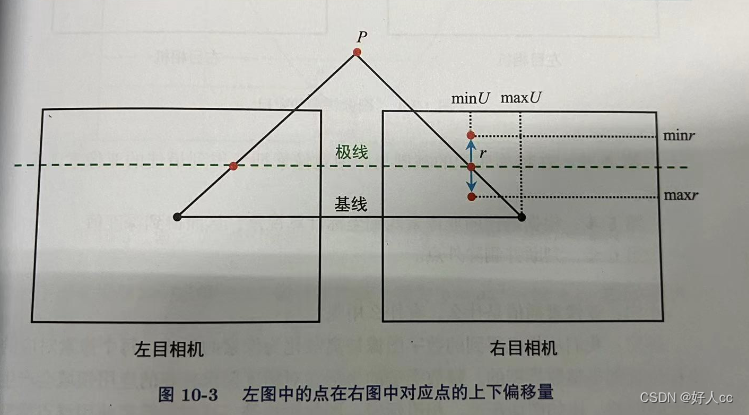
- 行特征点统计。考虑用图像金字塔尺度作为偏移量,在当前点上下正负偏移量(r)内的纵坐标值都认为是匹配点可能存在的行数。之所以这样做,是因为极线矫正后仍然存在一定的误差,通过这种方式可以避免漏匹配。对于左图中极线上的投影像素点,在右图中搜索的纵坐标范围是minr~maxr。
- 粗匹配。在左图中的特征点与右图中的候选匹配点进行逐个比较,得到描述子距离最小的点作为最佳的粗匹配点。根据三维点的距离范围可以将横坐标搜索范围限制在minU~maxU。maxU对应的是三维点位于无穷远处,视差为0时的横坐标,而minU对应的是三维点位于最近距离时的横坐标。
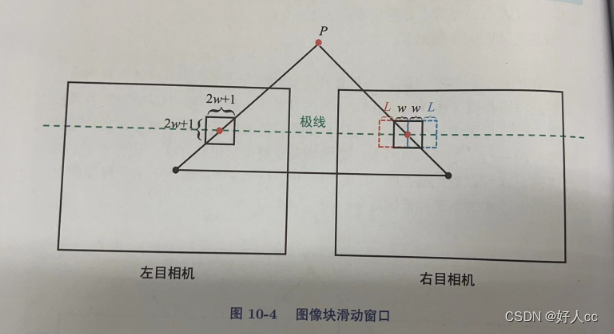
- 在粗匹配的基础上,在图像块滑动窗口内用差的绝对和(Sum of Absolute Differences,SAD)实现精确匹配。此时得到的匹配像素坐标仍然是整数坐标。如图10-4,
/** 双目匹配函数** 为左图的每一个特征点在右图中找到匹配点 \n* 根据基线(有冗余范围)上描述子距离找到匹配, 再进行SAD精确定位 \n ‘* 这里所说的SAD是一种双目立体视觉匹配算法,可参考[https://blog.csdn.net/u012507022/article/details/51446891]* 最后对所有SAD的值进行排序, 剔除SAD值较大的匹配对,然后利用抛物线拟合得到亚像素精度的匹配 \n * 这里所谓的亚像素精度,就是使用这个拟合得到一个小于一个单位像素的修正量,这样可以取得更好的估计结果,计算出来的点的深度也就越准确* 匹配成功后会更新 mvuRight(ur) 和 mvDepth(Z)*/
void Frame::ComputeStereoMatches()
{/*两帧图像稀疏立体匹配(即:ORB特征点匹配,非逐像素的密集匹配,但依然满足行对齐)* 输入:两帧立体矫正后的图像img_left 和 img_right 对应的orb特征点集* 过程:1. 行特征点统计. 统计img_right每一行上的ORB特征点集,便于使用立体匹配思路(行搜索/极线搜索)进行同名点搜索, 避免逐像素的判断.2. 粗匹配. 根据步骤1的结果,对img_left第i行的orb特征点pi,在img_right的第i行上的orb特征点集中搜索相似orb特征点, 得到qi3. 精确匹配. 以点qi为中心,半径为r的范围内,进行块匹配(归一化SAD),进一步优化匹配结果4. 亚像素精度优化. 步骤3得到的视差为uchar/int类型精度,并不一定是真实视差,通过亚像素差值(抛物线插值)获取float精度的真实视差5. 最优视差值/深度选择. 通过胜者为王算法(WTA)获取最佳匹配点。6. 删除离群点(outliers). 块匹配相似度阈值判断,归一化sad最小,并不代表就一定是正确匹配,比如光照变化、弱纹理等会造成误匹配* 输出:稀疏特征点视差图/深度图(亚像素精度)mvDepth 匹配结果 mvuRight*/// 为匹配结果预先分配内存,数据类型为float型// mvuRight存储右图匹配点索引// mvDepth存储特征点的深度信息mvuRight = vector<float>(N,-1.0f);mvDepth = vector<float>(N,-1.0f);// orb特征相似度阈值 -> mean ~= (max + min) / 2const int thOrbDist = (ORBmatcher::TH_HIGH+ORBmatcher::TH_LOW)/2;// 金字塔底层(0层)图像高 nRowsconst int nRows = mpORBextractorLeft->mvImagePyramid[0].rows;// 二维vector存储每一行的orb特征点的列坐标的索引,为什么是vector,因为每一行的特征点有可能不一样,例如// vRowIndices[0] = [1,2,5,8, 11] 第1行有5个特征点,他们的列号(即x坐标)分别是1,2,5,8,11// vRowIndices[1] = [2,6,7,9, 13, 17, 20] 第2行有7个特征点.etcvector<vector<size_t> > vRowIndices(nRows, vector<size_t>());for(int i=0; i<nRows; i++) vRowIndices[i].reserve(200);// 右图特征点数量,N表示数量 r表示右图,且不能被修改const int Nr = mvKeysRight.size();// Step 1. 行特征点统计。 考虑用图像金字塔尺度作为偏移,左图中对应右图的一个特征点可能存在于多行,而非唯一的一行for(int iR = 0; iR < Nr; iR++) {// 获取特征点ir的y坐标,即行号const cv::KeyPoint &kp = mvKeysRight[iR];const float &kpY = kp.pt.y;// 计算特征点ir在行方向上,可能的偏移范围r,即可能的行号为[kpY + r, kpY -r]// 2 表示在全尺寸(scale = 1)的情况下,假设有2个像素的偏移,随着尺度变化,r也跟着变化const float r = 2.0f * mvScaleFactors[mvKeysRight[iR].octave];const int maxr = ceil(kpY + r);const int minr = floor(kpY - r);// 将特征点ir保证在可能的行号中for(int yi=minr;yi<=maxr;yi++)vRowIndices[yi].push_back(iR);}// 下面是 粗匹配 + 精匹配的过程// 对于立体矫正后的两张图,在列方向(x)存在最大视差maxd和最小视差mind// 也即是左图中任何一点p,在右图上的匹配点的范围为应该是[p - maxd, p - mind], 而不需要遍历每一行所有的像素// maxd = baseline * length_focal / minZ// mind = baseline * length_focal / maxZconst float minZ = mb;const float minD = 0; // 最小视差为0,对应无穷远 const float maxD = mbf/minZ; // 最大视差对应的距离是相机的基线// 保存sad块匹配相似度和左图特征点索引vector<pair<int, int> > vDistIdx;vDistIdx.reserve(N);// 为左图每一个特征点il,在右图搜索最相似的特征点irfor(int iL=0; iL<N; iL++) {const cv::KeyPoint &kpL = mvKeys[iL];const int &levelL = kpL.octave;const float &vL = kpL.pt.y;const float &uL = kpL.pt.x;// 获取左图特征点il所在行,以及在右图对应行中可能的匹配点const vector<size_t> &vCandidates = vRowIndices[vL];if(vCandidates.empty()) continue;// 计算理论上的最佳搜索范围const float minU = uL-maxD;const float maxU = uL-minD;// 最大搜索范围小于0,说明无匹配点if(maxU<0) continue;// 初始化最佳相似度,用最大相似度,以及最佳匹配点索引int bestDist = ORBmatcher::TH_HIGH;size_t bestIdxR = 0;const cv::Mat &dL = mDescriptors.row(iL);// Step 2. 粗配准。左图特征点il与右图中的可能的匹配点进行逐个比较,得到最相似匹配点的描述子距离和索引for(size_t iC=0; iC<vCandidates.size(); iC++) {const size_t iR = vCandidates[iC];const cv::KeyPoint &kpR = mvKeysRight[iR];// 左图特征点il与待匹配点ic的空间尺度差超过2,放弃if(kpR.octave<levelL-1 || kpR.octave>levelL+1)continue;// 使用列坐标(x)进行匹配,和stereomatch一样const float &uR = kpR.pt.x;// 超出理论搜索范围[minU, maxU],可能是误匹配,放弃if(uR >= minU && uR <= maxU) {// 计算匹配点il和待匹配点ic的相似度distconst cv::Mat &dR = mDescriptorsRight.row(iR);const int dist = ORBmatcher::DescriptorDistance(dL,dR);//统计最小相似度及其对应的列坐标(x)if( dist<bestDist ) {bestDist = dist;bestIdxR = iR;}}}// Step 3. 图像块滑动窗口用SAD(Sum of absolute differences,差的绝对和)实现精确匹配. if(bestDist<thOrbDist) {// 如果刚才匹配过程中的最佳描述子距离小于给定的阈值// 计算右图特征点x坐标和对应的金字塔尺度const float uR0 = mvKeysRight[bestIdxR].pt.x;const float scaleFactor = mvInvScaleFactors[kpL.octave];// 尺度缩放后的左右图特征点坐标const float scaleduL = round(kpL.pt.x*scaleFactor); const float scaledvL = round(kpL.pt.y*scaleFactor);const float scaleduR0 = round(uR0*scaleFactor);// 滑动窗口搜索, 类似模版卷积或滤波// w表示sad相似度的窗口半径const int w = 5;// 提取左图中,以特征点(scaleduL,scaledvL)为中心, 半径为w的图像块patchcv::Mat IL = mpORBextractorLeft->mvImagePyramid[kpL.octave].rowRange(scaledvL-w,scaledvL+w+1).colRange(scaleduL-w,scaleduL+w+1);IL.convertTo(IL,CV_32F);// 图像块均值归一化,降低亮度变化对相似度计算的影响IL = IL - IL.at<float>(w,w) * cv::Mat::ones(IL.rows,IL.cols,CV_32F);//初始化最佳相似度int bestDist = INT_MAX;// 通过滑动窗口搜索优化,得到的列坐标偏移量int bestincR = 0;//滑动窗口的滑动范围为(-L, L)const int L = 5;// 初始化存储图像块相似度vector<float> vDists;vDists.resize(2*L+1); // 计算滑动窗口滑动范围的边界,因为是块匹配,还要算上图像块的尺寸// 列方向起点 iniu = r0 - 最大窗口滑动范围 - 图像块尺寸// 列方向终点 eniu = r0 + 最大窗口滑动范围 + 图像块尺寸 + 1// 此次 + 1 和下面的提取图像块是列坐标+1是一样的,保证提取的图像块的宽是2 * w + 1// ! 源码: const float iniu = scaleduR0+L-w; 错误// scaleduR0:右图特征点x坐标const float iniu = scaleduR0-L-w;const float endu = scaleduR0+L+w+1;// 判断搜索是否越界if(iniu<0 || endu >= mpORBextractorRight->mvImagePyramid[kpL.octave].cols)continue;// 在搜索范围内从左到右滑动,并计算图像块相似度for(int incR=-L; incR<=+L; incR++) {// 提取右图中,以特征点(scaleduL,scaledvL)为中心, 半径为w的图像快patchcv::Mat IR = mpORBextractorRight->mvImagePyramid[kpL.octave].rowRange(scaledvL-w,scaledvL+w+1).colRange(scaleduR0+incR-w,scaleduR0+incR+w+1);IR.convertTo(IR,CV_32F);// 图像块均值归一化,降低亮度变化对相似度计算的影响IR = IR - IR.at<float>(w,w) * cv::Mat::ones(IR.rows,IR.cols,CV_32F);// sad 计算,值越小越相似float dist = cv::norm(IL,IR,cv::NORM_L1);// 统计最小sad和偏移量if(dist<bestDist) {bestDist = dist;bestincR = incR;}//L+incR 为refine后的匹配点列坐标(x)vDists[L+incR] = dist; }// 搜索窗口越界判断if(bestincR==-L || bestincR==L)continue;// Step 4. 亚像素插值, 使用最佳匹配点及其左右相邻点构成抛物线来得到最小sad的亚像素坐标// 使用3点拟合抛物线的方式,用极小值代替之前计算的最优是差值// \ / <- 由视差为14,15,16的相似度拟合的抛物线// . .(16)// .14 .(15) <- int/uchar最佳视差值// . // (14.5)<- 真实的视差值// deltaR = 15.5 - 16 = -0.5// 公式参考opencv sgbm源码中的亚像素插值公式// 或论文<<On Building an Accurate Stereo Matching System on Graphics Hardware>> 公式7const float dist1 = vDists[L+bestincR-1]; const float dist2 = vDists[L+bestincR];const float dist3 = vDists[L+bestincR+1];const float deltaR = (dist1-dist3)/(2.0f*(dist1+dist3-2.0f*dist2));// 亚像素精度的修正量应该是在[-1,1]之间,否则就是误匹配if(deltaR<-1 || deltaR>1)continue;// 根据亚像素精度偏移量delta调整最佳匹配索引float bestuR = mvScaleFactors[kpL.octave]*((float)scaleduR0+(float)bestincR+deltaR);float disparity = (uL-bestuR);if(disparity>=minD && disparity<maxD) {// 如果存在负视差,则约束为0.01if( disparity <=0 ) {disparity=0.01;bestuR = uL-0.01;}// 根据视差值计算深度信息// 保存最相似点的列坐标(x)信息// 保存归一化sad最小相似度// Step 5. 最优视差值/深度选择.mvDepth[iL]=mbf/disparity;mvuRight[iL] = bestuR;vDistIdx.push_back(pair<int,int>(bestDist,iL));} }}// Step 6. 删除离群点(outliers)// 块匹配相似度阈值判断,归一化sad最小,并不代表就一定是匹配的,比如光照变化、弱纹理、无纹理等同样会造成误匹配// 误匹配判断条件 norm_sad > 1.5 * 1.4 * mediansort(vDistIdx.begin(),vDistIdx.end());const float median = vDistIdx[vDistIdx.size()/2].first;const float thDist = 1.5f*1.4f*median;for(int i=vDistIdx.size()-1;i>=0;i--) {if(vDistIdx[i].first<thDist)break;else {// 误匹配点置为-1,和初始化时保持一直,作为error codemvuRight[vDistIdx[i].second]=-1;mvDepth[vDistIdx[i].second]=-1;}}
}