文章目录
7.4.1 概述
7.4.2 设置集结航点
7.4.3 飞行示例
7.4.4 附录

7.4.1 概述
通常情况下,当固定翼或旋翼飞机进入"返回发射"(Return to Launch (RTL))模式(通常由自动驾驶仪失控保护触发)(failsafe)时,默认行为是返回 Home 原点(Home point),但在某些情况下,这并不可取。例如,这可能是一个充满人员或财产的区域,在 RTL 模式下运行的系统很可能处于需要特别小心的状态!还有一种可能是,飞行计划足够大,如果飞机进入 RTL 模式,则不宜一路返回到起飞点。
因此,我们现在支持创建多个集结点。如果飞机进入 RTL 且已定义集结点,那么它将前往最近的集结点,而不是前往 Home 原点。固定翼将在该位置悬停,而 Copter 将在该位置执行自动降落。

带有集结点的飞行计划。集结点用紫色标记表示。将鼠标移至一个集结点上,就会显示其悬停高度(如上图中的中间点)。
7.4.2 设置集结航点
以下步骤用于在 Mission Planner 中指定集结点:
1. Rally Point 的纬度和经度。要设置集结点的位置,请在飞行计划地图上单击右键,然后在弹出的菜单中选择集结点 > 设置集结点(请注意,这只在飞行计划屏幕上有效,在飞行数据屏幕上无效):

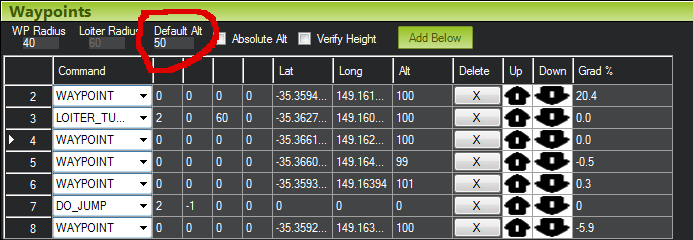
2. 需要指定集结点 Loiter 的海拔高度(注意,集结点的默认高度是默认航点高度值,是相对于 Home 原点位置而言的):

3. 对所有需要的集结点重复上述步骤!
4. 从右键单击弹出菜单中选择集结点 > 上传,上传至飞行器。
使用集结点时应注意以下几点:
1. 如果使用地理围栏(geofence):强烈建议你在活动中使用的集结点位于地理围栏内。
2. 确保集结点的高度足以清除地形和建筑物。
3. 由于 APM2.x 硬件的闪存容量有限,因此固定翼上集结点数量限制为 10 个,旋翼机上集结点数量限制为 6 个,这一限制将来可能会在 Pixhawk 等其他平台上扩大。
4. 在固定翼上,集结点的悬停半径与所有其他悬停点相同,由 WP_LOITER_RAD 参数决定。
5. ALT_HOLD_RTL RTL_ALT 参数不适用于集结点!飞机将以添加集结点时指定的高度飞往集结点。
以下 MAVLink 参数控制集结点行为:
1. RALLY_LIMIT_KM 是集结点距离飞机的最大距离,用于 RTL 事件。如果所有集结点距飞行器的距离都大于此值,则在 RTL 事件中将使用原点位置(在 ALT_HOLD_RTL 高度)。如果为多个飞行区域指定了集结点,该参数用于防止飞离。如果设置为 0,则可以禁用此参数。
2. RALLY_INCL_HOME 允许将"Home原点"包含在"集结点"中,使其在比任何"集结点"都更接近返回"Home原点"。
3. RALLY_TOTAL 是当前指定的集结点数量。在你添加和删除集结点时,地面控制站(如 Mission Planner)将为你设置该参数。手动设置该参数的可能性很小,而且很可能不安全。如果你没有指定任何集结点,RALLY_TOTAL 应该为 0,在这种情况下,RTL 事件将使用 Home 原点位置。
7.4.3 飞行示例
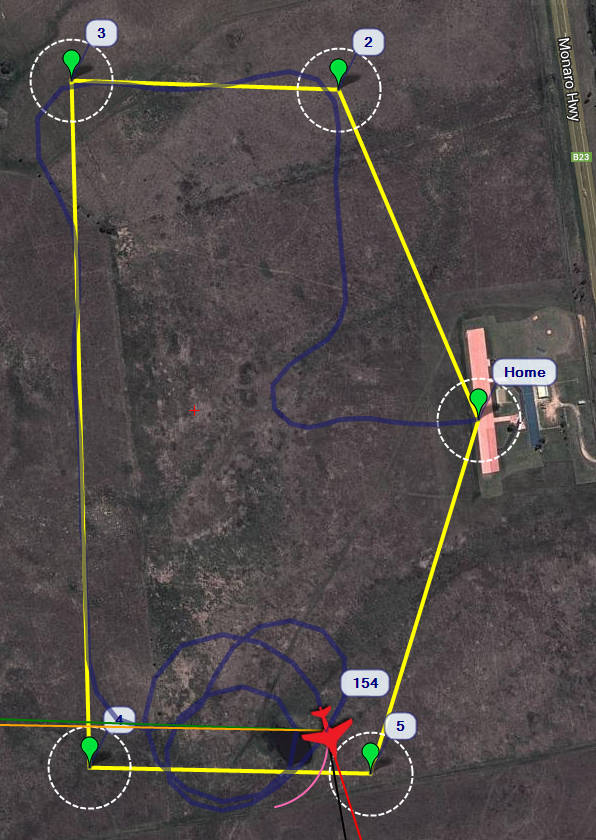
RTL 指挥的飞行接近航路点。固定翼开始在最南端的集结点附近徘徊。

7.4.4 附录
集结点文件中的 RALLY 字段如下:
1. Lat:集结点的纬度;
2. Lon:集结点的经度;
3. Alt:集结点的 AGL 高度,以旋翼飞机/固定翼获得 GPS 锁定的位置为参照;
4. 脱离高度:NPS 固定翼专用;脱离闲逛并飞向着陆航点的点。也以 AGL 表示;
5. 期望航向:在脱离闲逛状态之前,是否要验证固定翼的航向是否正确(见脱离高度);
6. 标志:
- 1 = FAVORABLE_WIND。在要求以顺风着陆时设置的标志。我们在海军研究生院从未实施过这一功能,但基本上可以确定是否要求飞机迎风着陆;
- 2 = LAND_IMMEDIATELY。当固定翼立即下降到脱离高度并在无 GCS 干预的情况下着陆时,设置该标志。如果飞机将在集结点闲逛,直到收到着陆指令,则不设置标志。