0.前言
本篇旨在让每个拿到Viobot设备的用户都能够第一时间测试它的效果,以及将设备配置到自己的环境下面。
1.上电
首先,我们先要把设备接上电源线和网线,最简单的方式就是网线直连电脑。
电源选用12V1.5A设备自带的电源即可。
2.配置网络
设备直连电脑能够通过上位机自动搜索到设备IP,这个功能可以用来解救我们修改IP出错或者是修改了IP后忘记了自己修改的IP的情况。
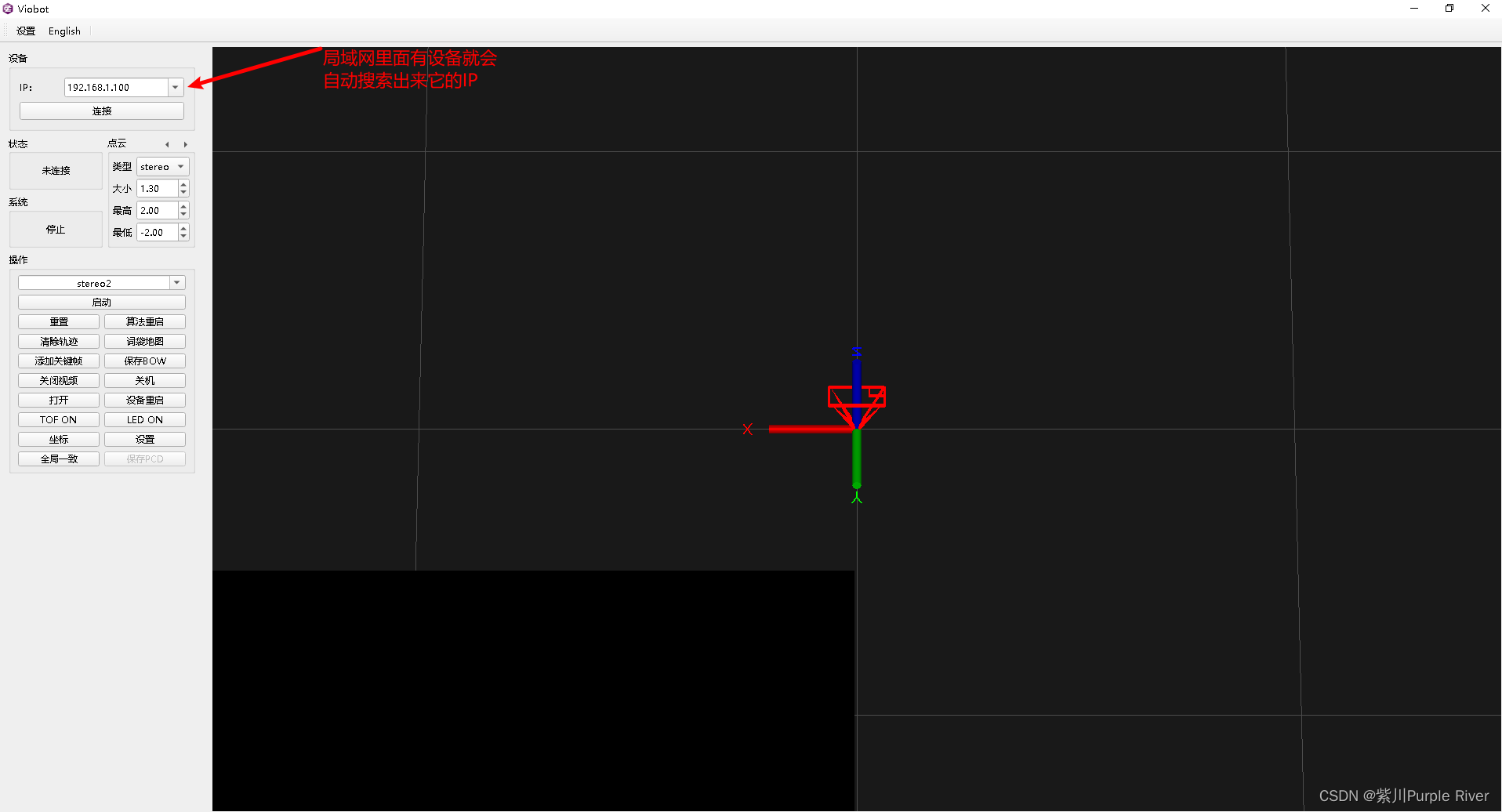
注意:搜索功能只是把设备搜索出来,当你电脑的IP段与设备不一致的时候,是连接不上的,所以我们需要按照下面的方法配置一下自己电脑的IP使得能够通过上位机连接到设备。
设备默认IP是192.168.1.100,我们就把电脑的ip设置为192.168.1.101
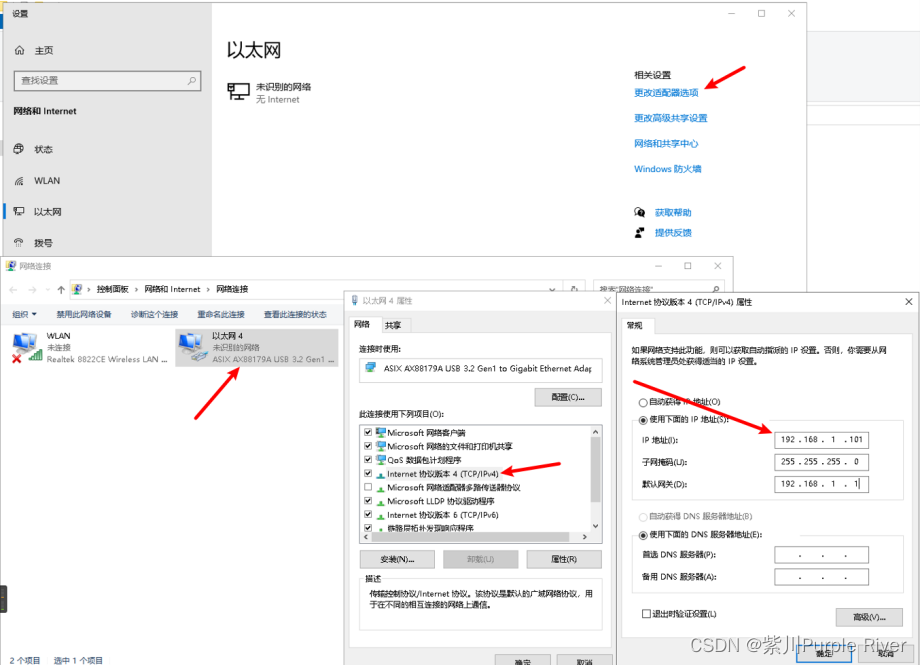
确定之后,开启命令行,试ping一下192.168.1.100 能够ping通则已配置完成。
3.连接设备
能ping通后,点连接即可。
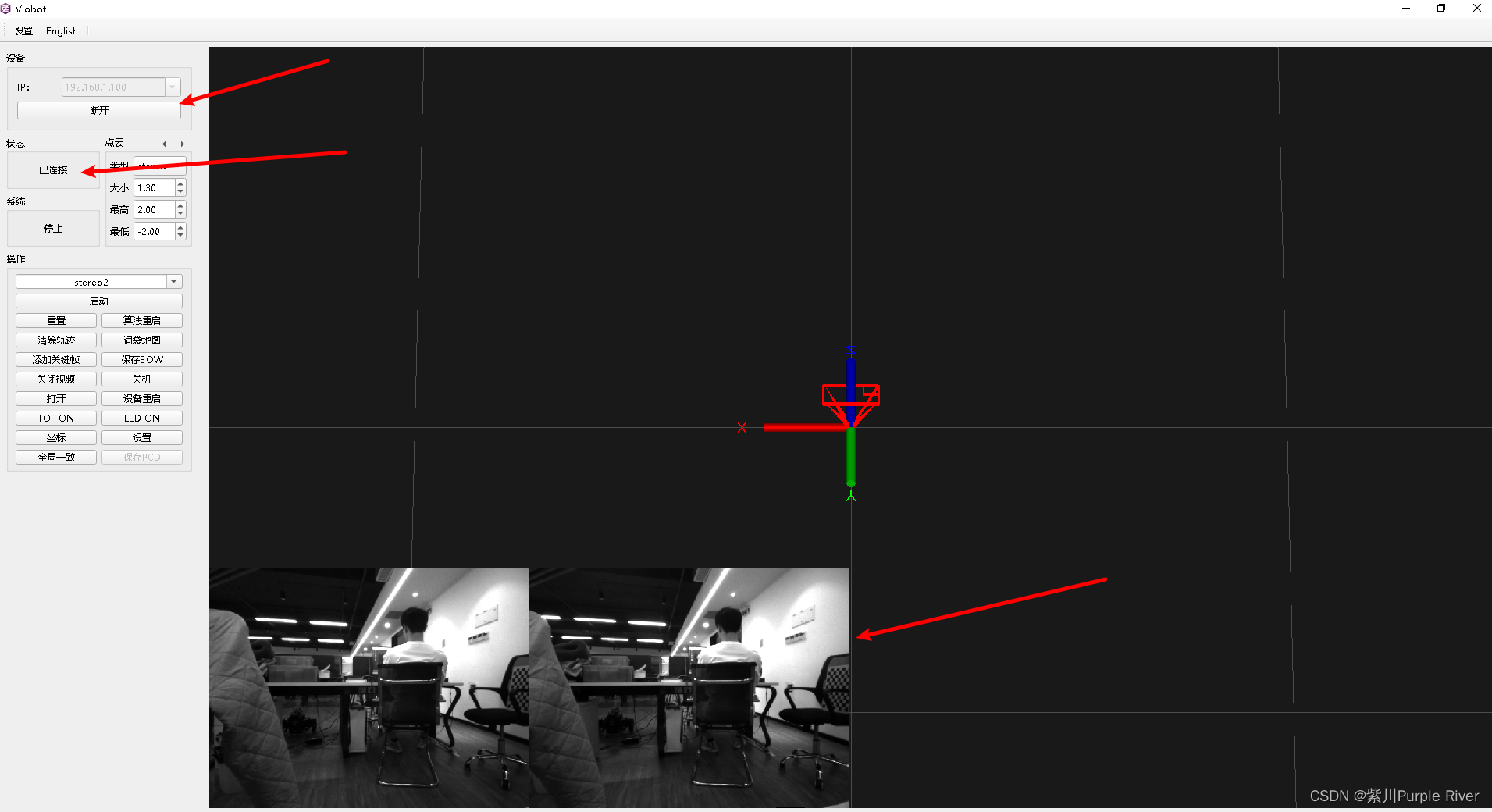
连接成功后,状态栏会变成已连接状态,左下角的视频流会刷新,挪动一下设备,看视频流是否正常、流畅。
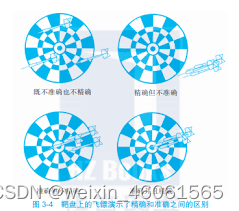
4.启动测试
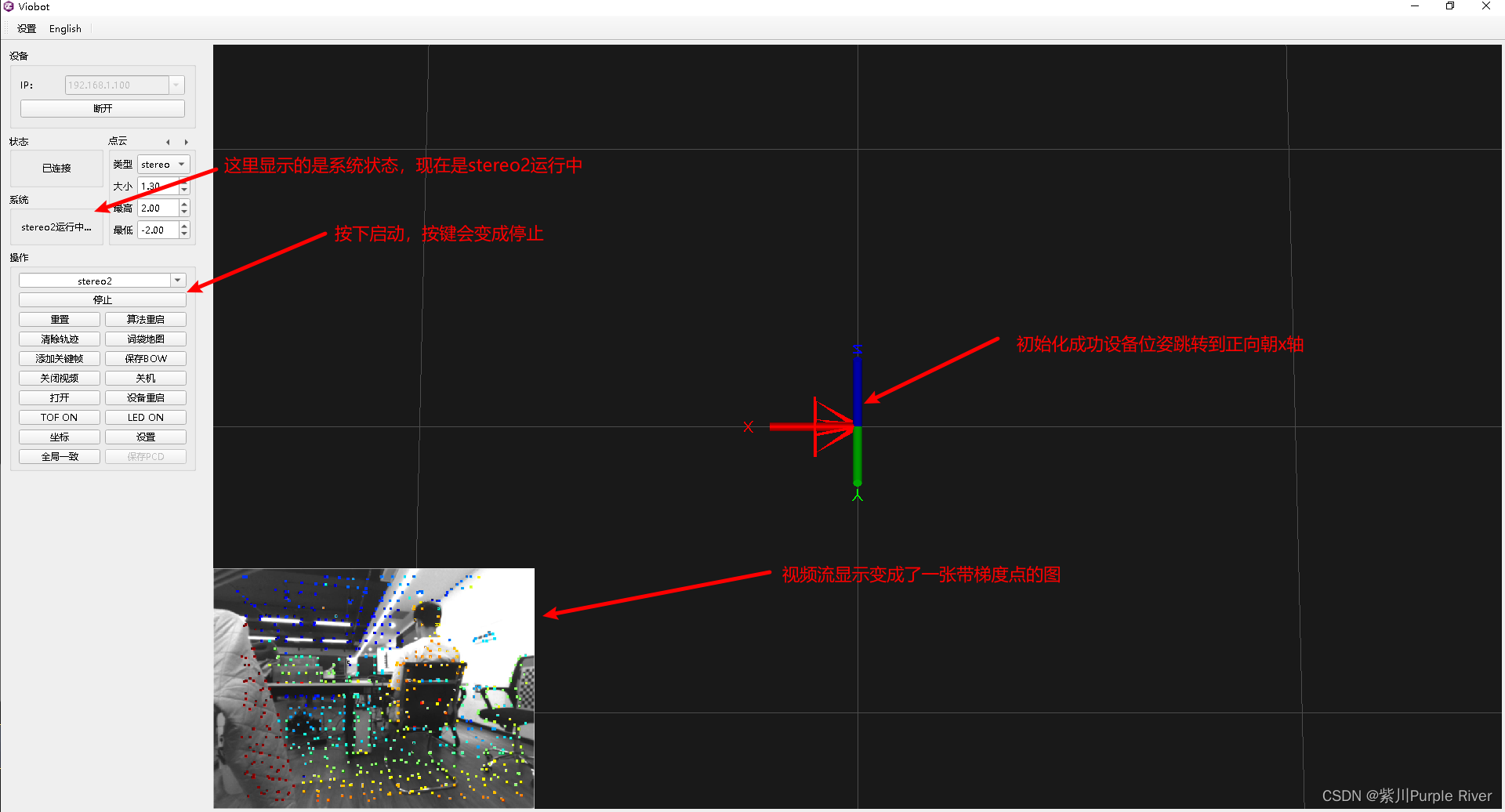
梯度点由近到远颜色次序是:红橙黄绿青蓝紫。我们可以通过这个图片看到算法当前状态的表现,如果图片上的点基本符合上述颜色次序,则运行正常,少量的错点可忽略。如果刚开的时候很多错点,可以稍微挪动一下设备,更新关键帧,即可恢复正常。
接下来,我们就可以将设备运动起来,看它的具体表现(位姿,图片上面的点颜色)是否正常,所有测试都正常,则可以做后面的工作了。(比如说用到自己的场景下,或者直接上车等等)
5.修改ip
实际使用我们可能不会将设备直连电脑,或者就是我的网络下面的IP地址192.168.1.100已经有其他的电脑占用了,故需要修改IP。
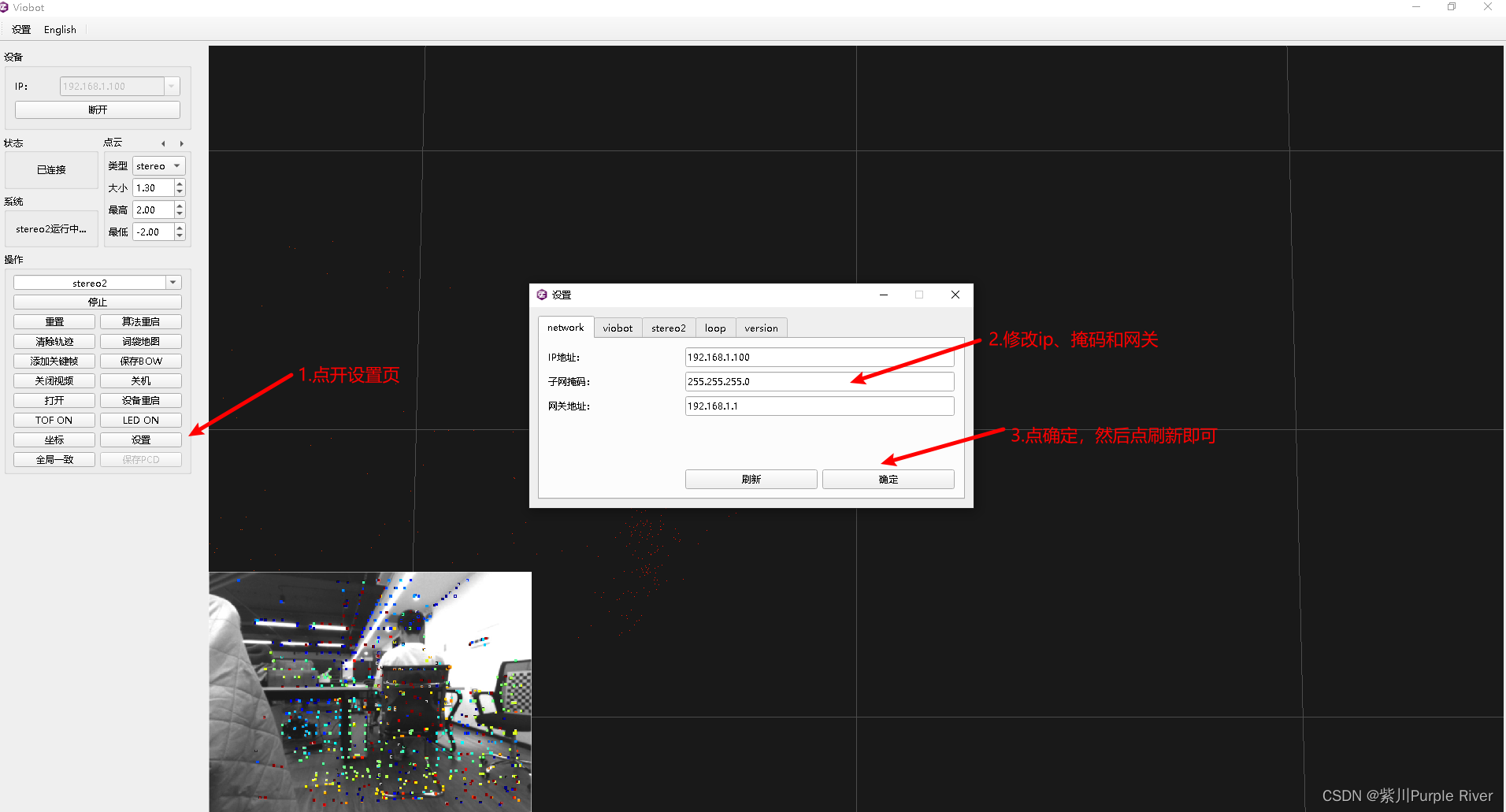
修改IP是需要重启才能够生效的,上位机的按键有一个设备重启的按键,可以直接重启设备。
如果我们设置IP的时候设置错了,或者是忘记了自己设置的IP,可以参照2所说的,上位机会自动搜索到局域网内的设备的IP。