前言
(1)在嵌入式程序设计中,我们常常会要对各类传感器进行数据存储。大多时候的传感器,例如红外光传感器,返回的数据要么是0,要么是1。因此,只需要一bit就能够存储。而很多人却常常使用char型数组存储,这样真正申请到的内存只使用了八分之一。对于MCU这种空间宝贵的微型控制器而言,这是对内存的极大浪费。
(2)因此,我在此介绍一个初学C语言时候讲解的技术——位域,提高空间的利用率。
(3)在入门嵌入式开发的时候,大多数人都是做一个循迹小车,而进行循迹,就需要对光电传感器进行偏差量化。根据偏差量化的值进行输出相应的PWM。(如果是开环控制)进行偏差量化,使用联合体,无疑是最高效的方式。
优化两种状态变量存储
存储
(1)例如,我这个小项目,需要使用上一个12路循迹模块,一个红外遥控器,一个触摸模块(有一种触摸模块你手摸上去,就会返回指定电平)。
(2)为了高效存储这些只有两个状态的变量。我们可以按照下面方式进行存储。
/*--- 存储结构设计 ---*/
typedef struct
{uint8_t track_bit1 :1;uint8_t track_bit2 :1;uint8_t track_bit3 :1;uint8_t track_bit4 :1;uint8_t track_bit5 :1;uint8_t track_bit6 :1;uint8_t track_bit7 :1;uint8_t track_bit8 :1;uint8_t track_bit9 :1;uint8_t track_bit10 :1;uint8_t track_bit11 :1;uint8_t track_bit12 :1; //上面都是灰度传感器控制位uint8_t IRDS_bit13 :1; //红外遥控器控制位uint8_t Touch_bit14 :1; //触摸模块uint8_t bit15 :1; //下面2bit保留uint8_t bit16 :1;
}Bit_field;
访问
(1)现在我们知道如何存储这个如何访问呢?这个其实是C语言位域基础知识,但是为了防止有一些大学这部分不教,所以我还是讲一下。
Bit_field two_status_sensor;
two_status_sensor.track_bit1 = readpin(1); //使用你当前的MCU读取引脚电平函数
two_status_sensor.track_bit2 = readpin(2); //使用你当前的MCU读取引脚电平函数
two_status_sensor.IRDS_bit13 = readpin(13); //使用你当前的MCU读取引脚电平函数
if(two_status_sensor.IRDS_bit13 == 1) //假设遥控器被按下,引脚为高电平
{//...
}
利用共用体进行偏差量化
利用Excel可视化偏差量化
(1)现在我们使用位域对这种2值变量有了一个很好的存储了。但是我们都知道,想循迹模块需要对数据进行处理。而如何进行偏差量化又是一个问题。在此,我推荐使用excl表格,这样能够非常直观的对数据处理。
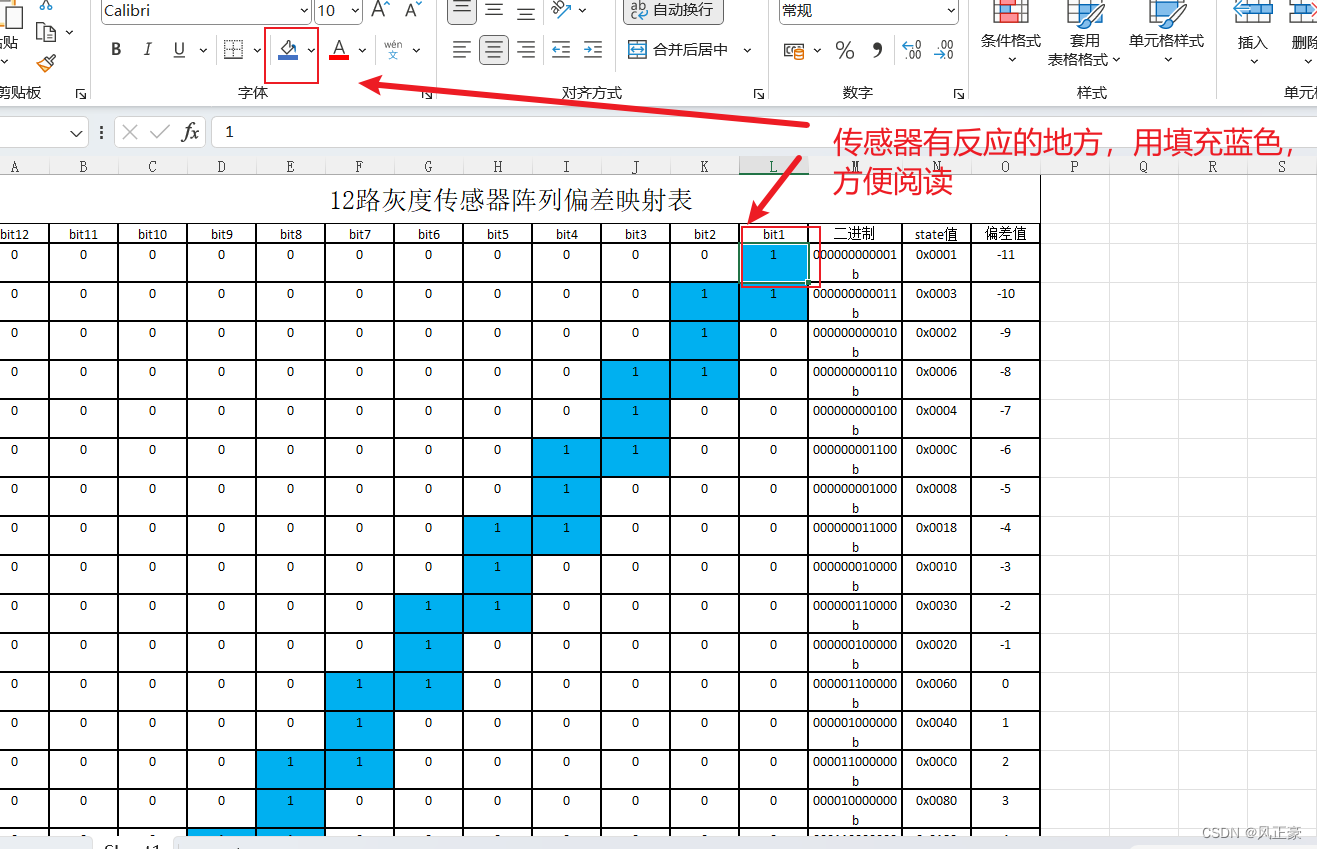
(2)我们有几路循迹,就需要写几格,一个16进制数据之后方便编程,最后是我们偏差量化值,2进制那一格是为了方便转换成16进制而写。
(3)美化表格
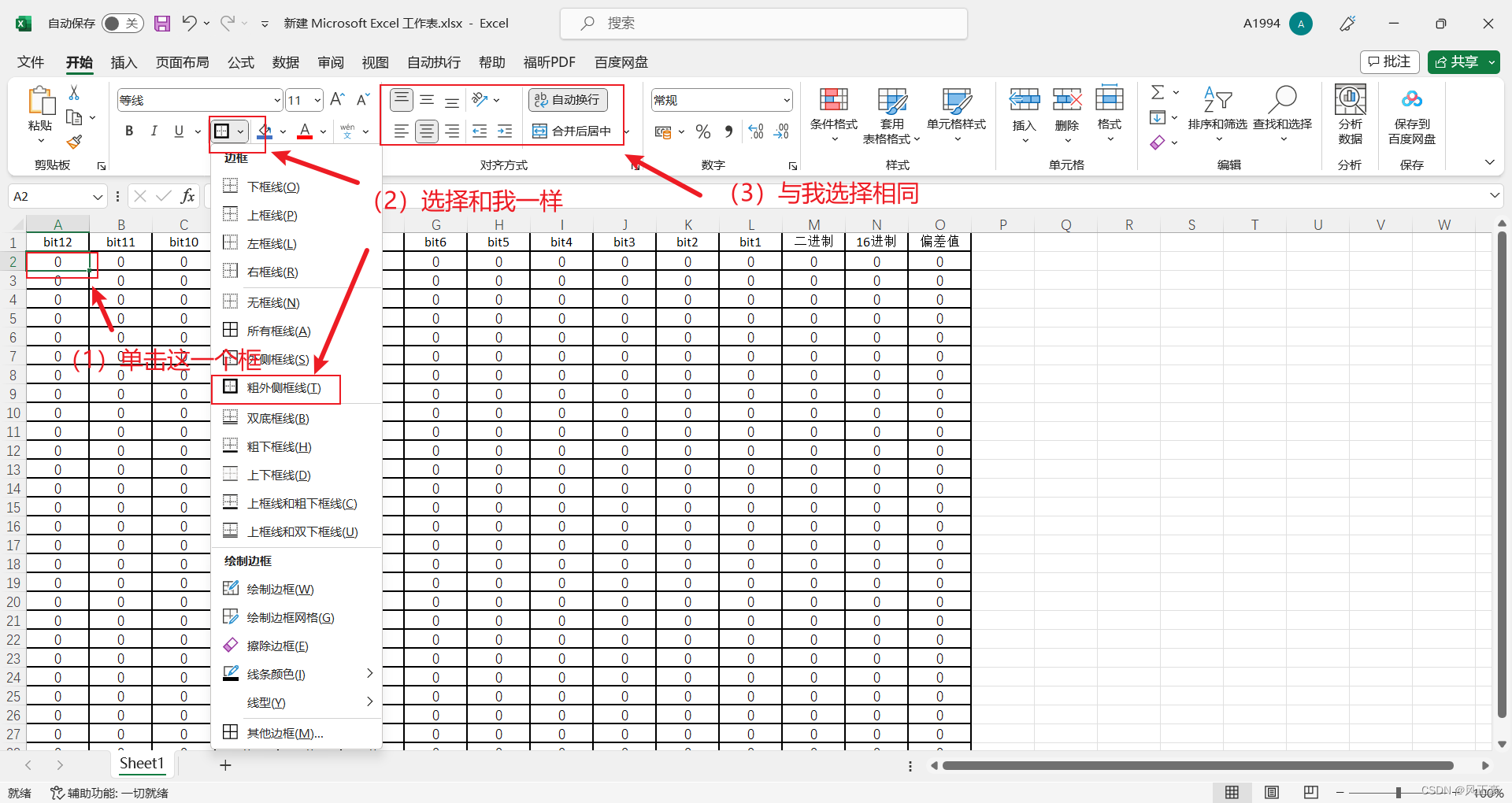
(4)将表格填充

(5)然后自己填写自己设定的偏差量化值,并且将传感器有反应的地方用蓝色填充,这样有利于阅读。
将偏差量化编程出来
大部分人写的垃圾代码
(1)用Excel将传感器的数值偏差量化出来了,但是如何编程了?想必很多同学使用下面这种非常低效方法进行偏差量化。
char deviation; //存储偏差量化值
if(two_status_sensor.track_bit1 == 1) deviation = -11;
if(two_status_sensor.track_bit1 == 1 && two_status_sensor.track_bit2) deviation = -10;
if(two_status_sensor.track_bit1 == 1) deviation = -9;
//...
(2)这种方法,编写起来非常麻烦,而且不方便阅读,可以说,写的相当的垃圾!
利用联合体管控标志位
(1)为了提高代码的观赏性,同时方便我们进行调试。我认为我们可以使用联合体的方法优化代码。这样之后,我们能够发现,对于偏差量化的值就能够进行非常好的管控。
/*--- 利用共用体优化偏差量化 ---*/
typedef union //利用共用体优化偏差量化
{Bit_field sensor_value;uint16_t state;
}_two_status_sensor; /*--- 访问变量 ---*/
char deviation; //存储偏差量化值的当前值
_two_status_sensor two_status_sensor; //定义用于记录传感器的值
two_status_sensor.sensor_value.track_bit1 = readpin(1); //使用你当前的MCU读取引脚电平函数
//... 省略读取传感器的值过程switch(two_status_sensor.state & 0x0FFF)//偏差量化,因为是12路循迹,所以只要低12位
{case 0x0001:deviation=-11;break; //000000000001bcase 0x0003:deviation=-10;break; //000000000011b//... 省略其他偏差量化过程default://其它特殊情况单独判断{//...}
}
利用带参宏进行标志位判断
(1)但是这个还能不能再次进行优化呢?肯定可以,我们知道,这个2值联合体中,有一些是用于循迹,有些是用于遥控器,有些是用于触摸芯片的。为了提高代码的可阅读性。我们是不是可以用几个带参宏来进行定义呢?
/*--- 利用带参宏进行标志位判断 ---*/
#define track_state(x) x & 0x0FFF
#define IRDS_state(x) x & 0x1000
#define Touch_state(x) x & 0x2000
利用?:和条件编译对提高代码对硬件的适配程度
(1)我们有没有发现一个问题,上面循迹代码,检测到黑线是1。那么肯定有人会说了,假如我硬件上检测到黑线是低电平怎么办呢?
(2)为了提高代码对硬件的适配能力,于是我认为可以使用条件编译。
(3)因为,不同的MCU读取电平返回的不一定是0和1,有可能读取到低电平是0,读取到高电平是一个其他的非0值,例如5。所以为了防止1bit存储不下导致溢出问题。我们可以使用?:来处理。
/*--- 提高代码对硬件的适配能力 ---*/
#define track_active_level 1 //高电平有效写1,低电平有效写0
#if track_active_level
two_status_sensor.sensor_value.track_bit1 = readpin(1)!=0?0x01:0x00;
//... 其他11个同理
#else
two_status_sensor.sensor_value.track_bit1 = readpin(1)==0?0x01:0x00;
//... 其他11个同理
#endif
进行错误判断,保护硬件,提高硬件的容错率
(1)看到上面的代码,肯定有骚年觉得已经很好了。但是,我们想想,如果循迹最终的结果返回的数据不是预期数据怎么办?例如小车跑出去了。
(2)为了防止这种异常情况,保护硬件,我们可以加一个标志位worse存储错误次数。如果次数超标就强制停车。
(3)因为小车循迹可能只是刚好偏离路线一点点,或者是硬件突然有点小问题,所以我们还可以建立一个标志位deviation_backup存储偏差量化值的以往值。让小车保持上一次的状态运行提高硬件容错率。
/*--- 提高代码对硬件的适配能力 ---*/
#define track_active_level 1 //高电平有效写1,低电平有效写0
#if track_active_level
two_status_sensor.sensor_value.track_bit1 = readpin(1)!=0?0x01:0x00;
//... 其他11个同理
#else
two_status_sensor.sensor_value.track_bit1 = readpin(1)==0?0x01:0x00;
//... 其他11个同理
#endif
/*--- 利用带参宏进行标志位判断 ---*/
#define track_state(x) x & 0x0FFF
#define IRDS_state(x) x & 0x1000
#define Touch_state(x) x & 0x2000
/*--- 利用共用体优化偏差量化 ---*/
typedef union //利用共用体优化偏差量化
{Bit_field sensor_value;uint16_t state;
}_two_status_sensor; /*--- 访问变量 ---*/
char deviation; //存储偏差量化值的当前值
char deviation_backup,worse;//存储偏差量化值的以往值,循迹错误次数
_two_status_sensor two_status_sensor; //定义用于记录传感器的值
two_status_sensor.sensor_value.track_bit1 = readpin(1); //使用你当前的MCU读取引脚电平函数
//... 省略读取传感器的值过程switch(track_state(two_status_sensor.state))//偏差量化,因为是12路循迹,所以只要低12位
{case 0x0001:deviation=-11;worse/2;break; //000000000001bcase 0x0003:deviation=-10;worse/=2;break; //000000000011b//... 省略其他偏差量化过程default://其它特殊情况单独判断{deviation=deviation_backup;//如果是异常情况,就保持上一个状态worse++;}
}
if(worse == 10) //如果多次循迹错误,说明出现问题了,为了保护硬件,强制停车
{//停车
}







![[保研/考研机试] KY43 全排列 北京大学复试上机题 C++实现](https://img-blog.csdnimg.cn/e247ca364de844d08aac166c17b3086b.png)