ICP算法
迭代最近点(Iterative Closest Point,ICP)算法是一种用于两个三维形状之间几何对齐(也叫做配准)的计算方法。通常,这两个形状至少有一个是点云数据。ICP算法用于最小化源点云与目标点云之间点到点的距离,从而寻找两者之间的最佳匹配变换(通常是刚体变换,但也可能是仿射或其他形式的变换)。
算法流程
初始化:设定初始猜测的变换参数(通常为单位矩阵)。
关联点:对于源点云中的每一个点,找到目标点云中的最近点。
最小化误差:找到一个变换,该变换能最小化源点到对应目标点之间的距离。
更新变换:将找到的变换应用于源点云。
收敛检查:检查误差或变换是否在一定阈值内收敛。如果是,则算法停止。否则,返回步骤2。
数学公式
设源点云 P 和目标点云Q 由 n 个点组成,其中pi∈P 和 qi∈Q。我们想要找到一个变换 T,使得总体误差 E 最小。
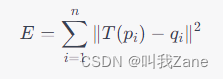
对于刚体变换,T 可以由旋转矩阵 R 和平移矢量 t 组成:
这个算法的优点是简单、直观、实现相对容易,缺点是容易收敛到局部最优解和计算复杂性较高。经常应用到机器人导航、对象识别、三维建模等场景。
代码流程
-
计算模型的质心:使用 VTK 的 vtkCenterOfMass 类计算 STL 模型的质心。这个质心用于后续找出模型中距质心最远的几个点。
-
找出四个距离质心最远的点:迭代遍历模型所有的点,并使用 VTK 的 vtkMath::Distance2BetweenPoints 方法计算每个点与质心的距离。找出四个距离质心最远的点,并保存它们的索引。
-
创建一个新的 vtkPolyData 对象,包含这四个点:使用 vtkPoints 和 vtkCellArray 创建一个新的 vtkPolyData 对象,这个对象只包括距离质心最远的四个点。
-
创建另一个 vtkPolyData 对象,包含在 3D 模型中选定的点:这个对象是算法的目标点集,也是使用 vtkPoints 和 vtkCellArray 创建的。
-
应用 ICP 算法:使用 VTK 的 vtkIterativeClosestPointTransform 类进行 ICP 对齐。设置源点(STL模型中的四个点)和目标点(3D模型中选定的点),并启动算法。
-
应用变换到 STL 模型:通过 vtkTransformPolyDataFilter 将 ICP 算法得出的变换应用到原始的 STL 模型上。
-
更新渲染:最后,更新模型的渲染,以反映应用了 ICP 变换后的新状态。
代码的核心是使用 ICP 算法进行两组点之间的最优对齐。它首先选取 STL 模型中四个特定的点(距离质心最远的点),然后用这些点与 3D 模型中预先选定的点进行对齐。通过这种方式,算法能够找到一个最佳的刚体变换,将 STL 模型与 3D 模型对齐。在这里面,所做的只是一个简单的配准示例。因为两个模型特征点的选取和ICP算法的应用都是比较复杂的,需要不断的尝试和优化,才能得到一个比较好的效果。
void performModelAlignment() {// Calculate Model Centerdouble modelCenter[3];auto centerCalculator = vtkSmartPointer<vtkCenterOfMass>::New();centerCalculator->SetInputData(reader->GetOutput());centerCalculator->SetUseScalarsAsWeights(false);centerCalculator->Update();centerCalculator->GetCenter(modelCenter);// Find Distant Points from Centerauto modelPoints = reader->GetOutput()->GetPoints();std::vector<vtkIdType> distantPoints = findDistantPoints(modelPoints, modelCenter, 4);// Construct PolyData for Distant Points in STLauto stlSelectedPointsData = createPolyDataFromPoints(modelPoints, distantPoints);// Construct PolyData for Selected Points in 3D Modelauto modelSelectedPointsData = createPolyDataFromPoints(featurePoints);// Perform ICPauto icpTransform = vtkSmartPointer<vtkIterativeClosestPointTransform>::New();icpTransform->SetSource(stlSelectedPointsData);icpTransform->SetTarget(modelSelectedPointsData);icpTransform->GetLandmarkTransform()->SetModeToRigidBody();icpTransform->Modified();icpTransform->Update();// Apply TransformationapplyTransformationToModel(icpTransform, reader->GetOutput());}std::vector<vtkIdType> findDistantPoints(vtkSmartPointer<vtkPoints> points, double center[3], int numPoints) {std::vector<vtkIdType> distantPoints;// ... (Same logic to find distant points)return distantPoints;
}vtkSmartPointer<vtkPolyData> createPolyDataFromPoints(vtkSmartPointer<vtkPoints> points, std::vector<vtkIdType> &selectedIds) {auto polyData = vtkSmartPointer<vtkPolyData>::New();auto selectedPoints = vtkSmartPointer<vtkPoints>::New();auto vertices = vtkSmartPointer<vtkCellArray>::New();// ... (Same logic to create PolyData)return polyData;
}void applyTransformationToModel(vtkSmartPointer<vtkIterativeClosestPointTransform> icpTransform, vtkSmartPointer<vtkPolyData> originalData) {auto transformFilter = vtkSmartPointer<vtkTransformPolyDataFilter>::New();transformFilter->SetInputData(originalData);transformFilter->SetTransform(icpTransform);transformFilter->Update();vtkPolyDataMapper::SafeDownCast(m_modelActor->GetMapper())->SetInputData(transformFilter->GetOutput());
}