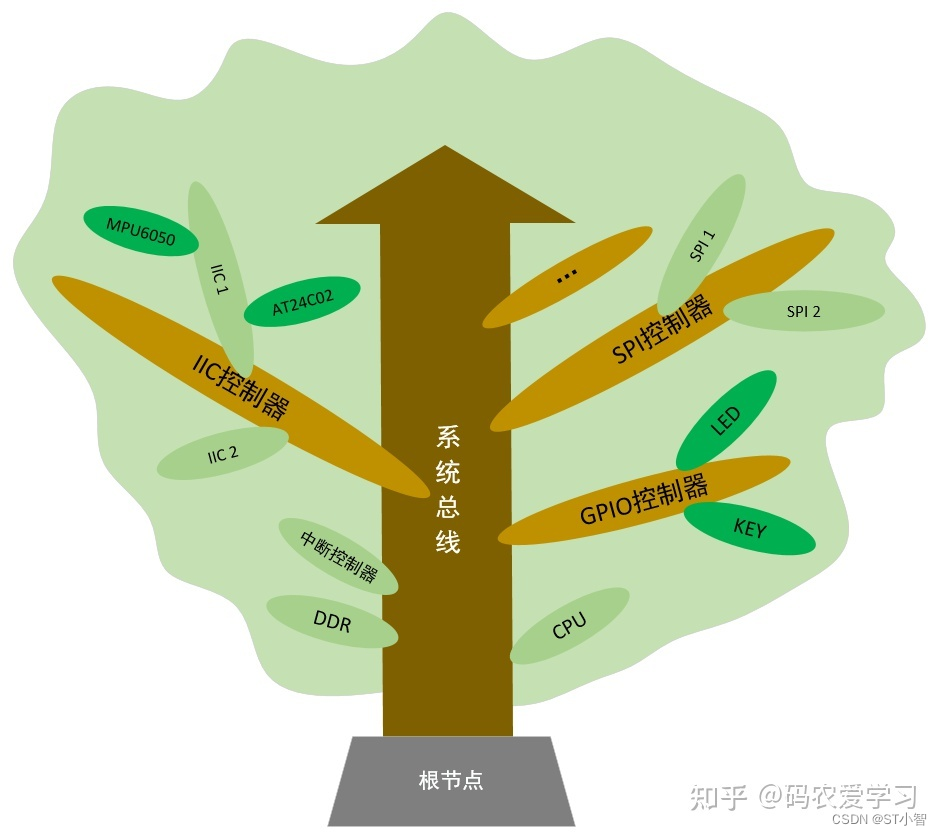
设备树(DTS:device tree source),字面意思就是一块电路板上设备如上图中CPU、DDR、I2C、GPIO、SPI等,按照树形结构描绘成的一棵树。按照策略和功能分离的思路,就是驱动代码(功能)和设备树DTS配置文件(策略)分开来进行设计,这样针对不同的电路板,Linux驱动代码就不用动了,只需要改改DTS就可以,DTS中的配置会决定哪些驱动去运行。
Linux相关知识在嵌入式领域中很重要,要学习可以找一个能运行Linux代码的环境,最好有一个开发板,也可以用qemu在ubuntu上运行。
1. 设备树起源
在Linux 2.6中,ARM架构的板极硬件细节过多地被硬编码在arch/arm/plat-xxx和arch/arm/mach-xxx中,如果外设发生相应的变化,那么驱动代码就需要改动。
2011年,Linux之父Linus Torvalds发现这个问题后,就通过邮件向ARM-Linux开发社区发了一封邮件,不禁的发出了一句“This whole ARM thing is a f*cking pain in the ass”。之后,ARM社区就引入了PowerPC等架构已经采用的设备树(Flattened Device Tree)机制,将板级信息内容都从Linux内核中分离开来,用一个专属的文件格式来描述,即现在的.dts文件。
从 3.x 版本之后开始支持使用设备树,这样做的意义重大,可以实现驱动代码与设备的硬件信息相互的隔离,减少了代码中的耦合性。通过设备树对硬件信息的抽象,驱动代码只要负责处理逻辑,而关于设备的具体信息存放到设备树文件中,这样,如果只是硬件接口信息的变化而没有驱动逻辑的变化,开发者只需要修改设备树文件信息,不需要改写驱动代码。
设备树由一系列被命名的节点(Node)和属性(Property)组成,而节点本身可包含子节点。在设备树中,可描述的信息包括:
-
CPU的数量和类别。
-
内存基地址和大小。
-
总线和桥。
-
外设连接。
-
中断控制器和中断使用情况。
-
GPIO控制器和GPIO使用情况。
-
时钟控制器和时钟使用情况。
基本上就是画一棵电路板上CPU、总线、设备组成的树,Bootloader会将这棵树传递给内核,然后内核可以识别这棵树,并根据它展开出Linux内核中的platform_device、i2c_client、spi_device等设备,而这些设备用到的内存、IRQ等资源,也被传递给了内核,内核会将这些资源绑定给展开的相应的设备。
2. 基本概念介绍

2.1 dts
dts(device tree source设备树源文件)文件是一种ASCII文本格式的设备树描述文件,此文件适合人类阅读,主要是给用户看的。
硬件的相应信息都会写在.dts为后缀的文件中,每一款硬件可以单独写一份xxxx.dts,一般在Linux源码中存在大量的dts文件,对于 arm 架构可以在arch/arm/boot/dts找到相应的dts,另外mips则在arch/mips/boot/dts,powerpc在arch/powerpc/boot/dts。
对于imx6ull开发板
arch/arm/boot/dts/100ask_imx6ull_qemu.dts
dts中一般会包一个公共部分的dtsi文件,如下:
#include "imx6ull.dtsi"
2.2 dtsi
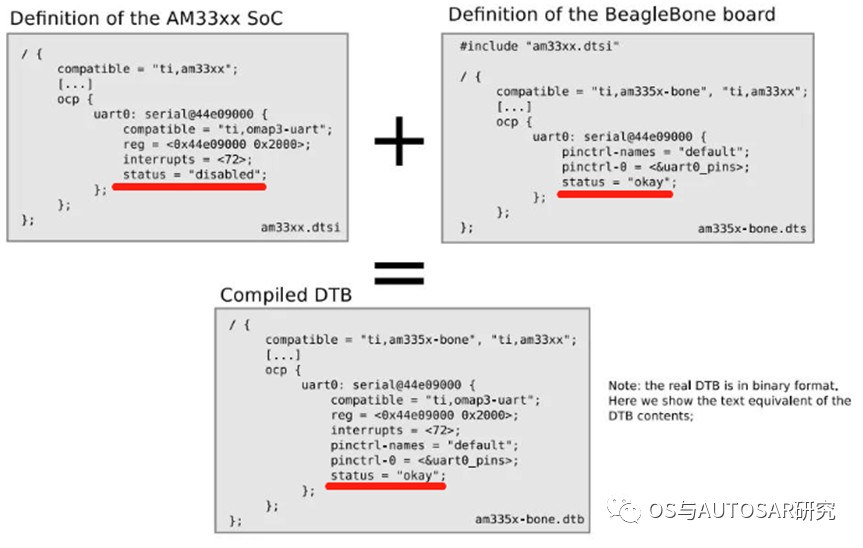
值得一提的是,对于一些相同的dts配置可以抽象到dtsi文件中,然后类似于 C 语言的方式可以include到dts文件中,对于imx6ull开发板arch/arm/boot/dts/imx6ull.dtsi
对于同一个节点的设置情况,dts中的配置会覆盖dtsi中的配置。具体如下图所示;
2.3 dtc
dtc是编译dts的工具,可以在Ubuntu系统上通过指令apt-get install device-tree-compiler安装dtc工具,不过在内核源码scripts/dtc路径下已经包含了dtc工具;
2.4 dtb
dtb(Device Tree Blob),dts经过dtc编译之后会得到dtb文件,dtb通过Bootloader引导程序加载到内核。所以Bootloader需要支持设备树才行;Kernel 也需要加入设备树的支持;
dtb文件布局如下:
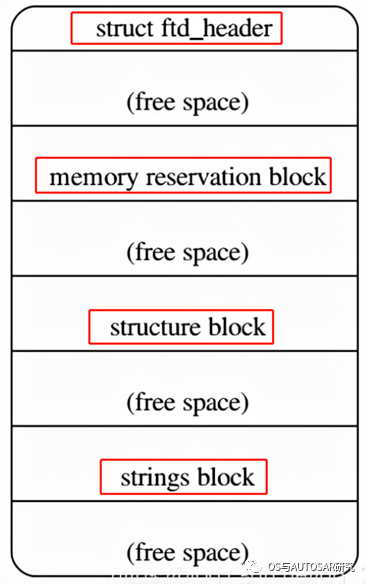
从上图可以看出,DTB文件主要包含四部分内容:
-
struct ftdheader:用来表明各个分部的偏移地址,整个文件的大小,版本号等;
-
memory reservation block:在设备树中使用/memreserve/ 定义的保留内存信息;
-
structure block:保存节点的信息,节点的结构;
-
strings block:保存属性的名字,单独作为字符串保存;
dtb文件代码级别的解析可以参考:
https://cloud.tencent.com/developer/article/1887823
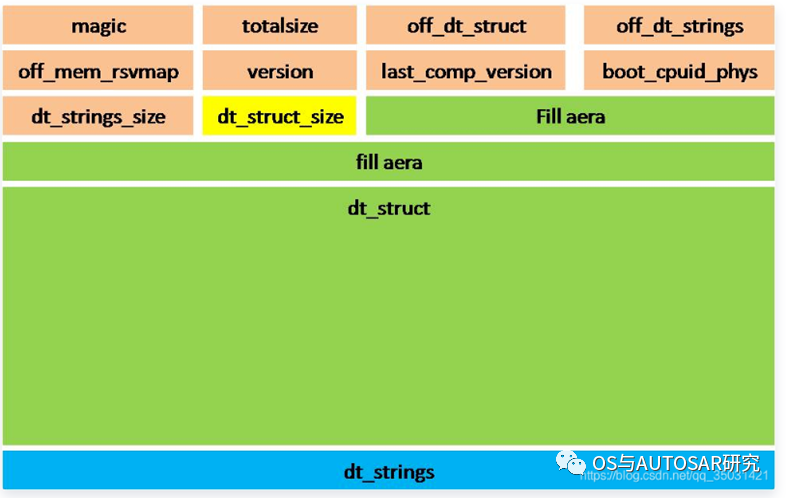
(1) dtb 文件的结构图如下:
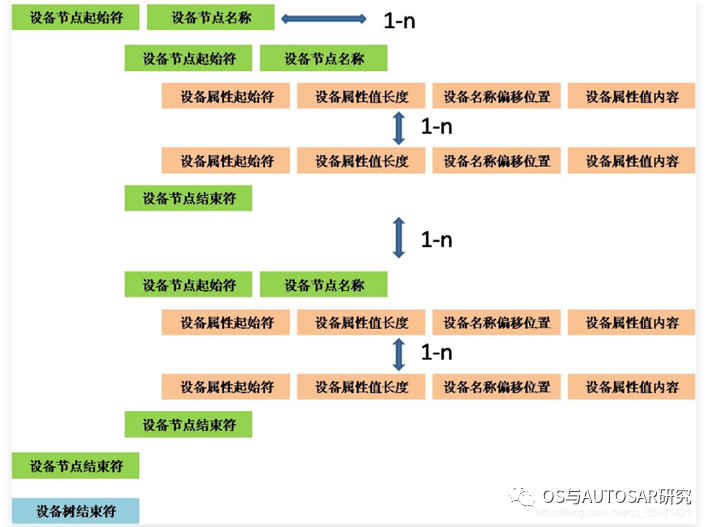
(2) 设备节点的结构图如下:
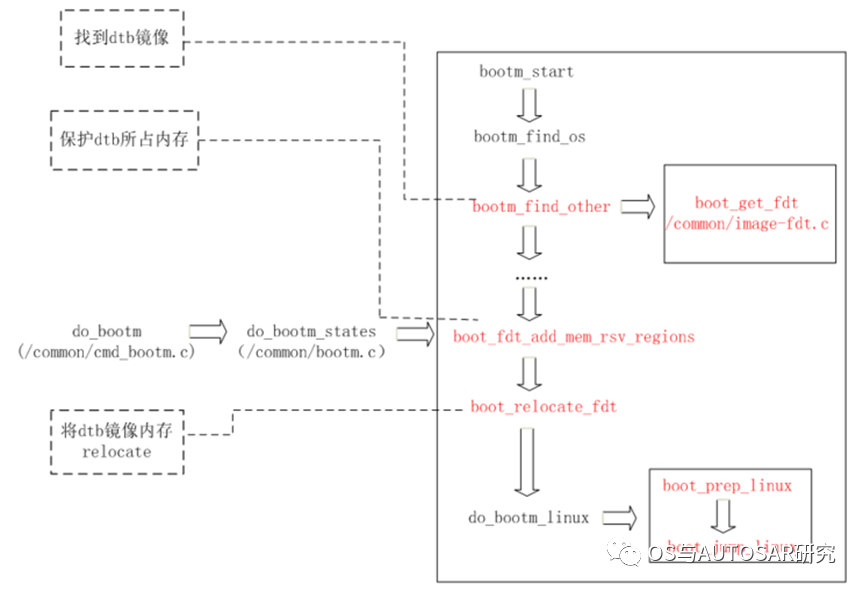
2.5 DTB加载及解析过程
U-Boot处理如下:
3. DTS基本框架
下图是一个设备树文件的基本架构;大概看了一下有点类似于XML文件,简单概括一下有这几个部分;
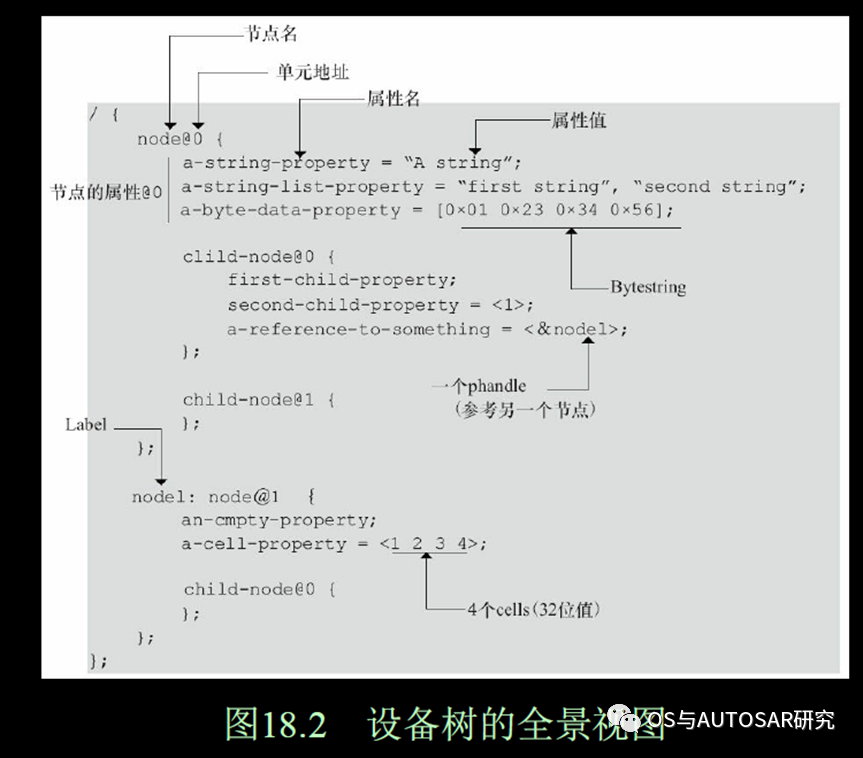
一个例子:
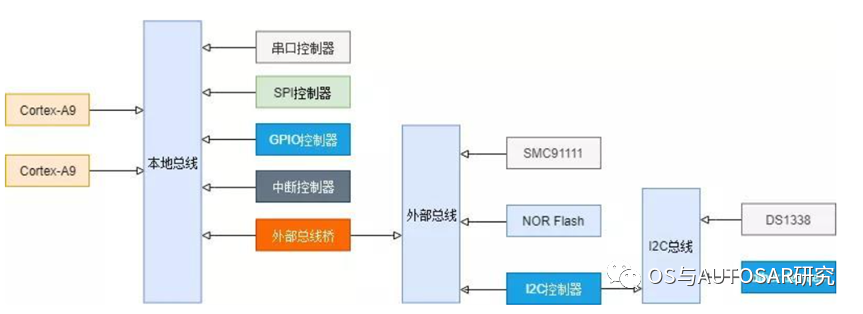
1 个双核ARM Cortex-A932 位处理器;ARM 本地总线上的内存映射区域分布有
两个串口(分别位于0x101F1000和0x101F2000)
GPIO控制器(位于0x101F3000)
SPI控制器(位于0x10170000)
中断控制器(位于0x10140000)
外部总线桥上连接的设备如下:
SMC SMC91111以太网(位于0x10100000)
I2C控制器(位于0x10160000)
64MB NOR Flash(位于0x30000000)
外部总线桥上连接的 I2C 控制器所对应的 I2C 总线上又连接了Maxim DS1338实时钟(I2C 地址为0x58)具体如下图所示;
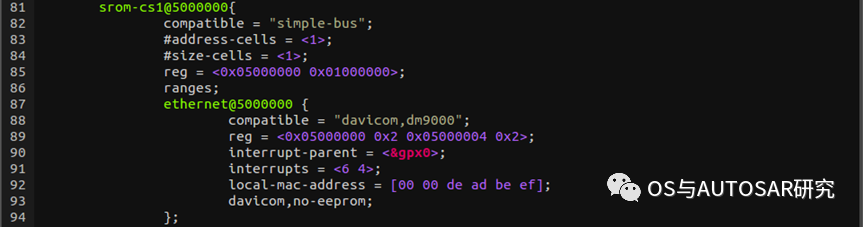
一个移植网卡的例子:
比如dm9000网卡,就需要首先将示例信息挂接到我们的板级设备树上,并根据芯片手册和电路原理图将相应的属性进行配置,再配置相应的驱动。需要注意的是,dm9000的地址线一般是接在片选线上的,所以设备树中就应该归属与相应片选线节点,我这里用的exynos4412,接在了bank1,所以是"<0x50000000 0x2 0x50000004 0x2>"
最终的配置结果是:
然后make menuconfig勾选相应的选项将dm9000的驱动编译进内核。
[*] Networking support ---> Networking options ---> <*> Packet socket <*>Unix domain sockets [*] TCP/IP networking [*] IP: kernel level autoconfigurationDevice Drivers ---> [*] Network device support ---> [*] Ethernet driver support (NEW) ---> <*> DM9000 supportFile systems ---> [*] Network File Systems (NEW) ---> <*> NFS client support [*] NFS client support for NFS version 3 [*] NFS client support for the NFSv3 ACL protocol extension [*] Root file system on NFS执行make uImage;make dtbs,tftp下载,成功加载nfs根文件系统并进入系统,表示网卡移植成功
详细语法参考:https://www.cnblogs.com/xiaojiang1025/p/6131381.html
4. 修改DTS试验
4.1 dts修改
修改设备树文件
arch/arm/boot/dts/100ask_imx6ull_qemu.dts,添加一个我们自己的模块dts_tree1:
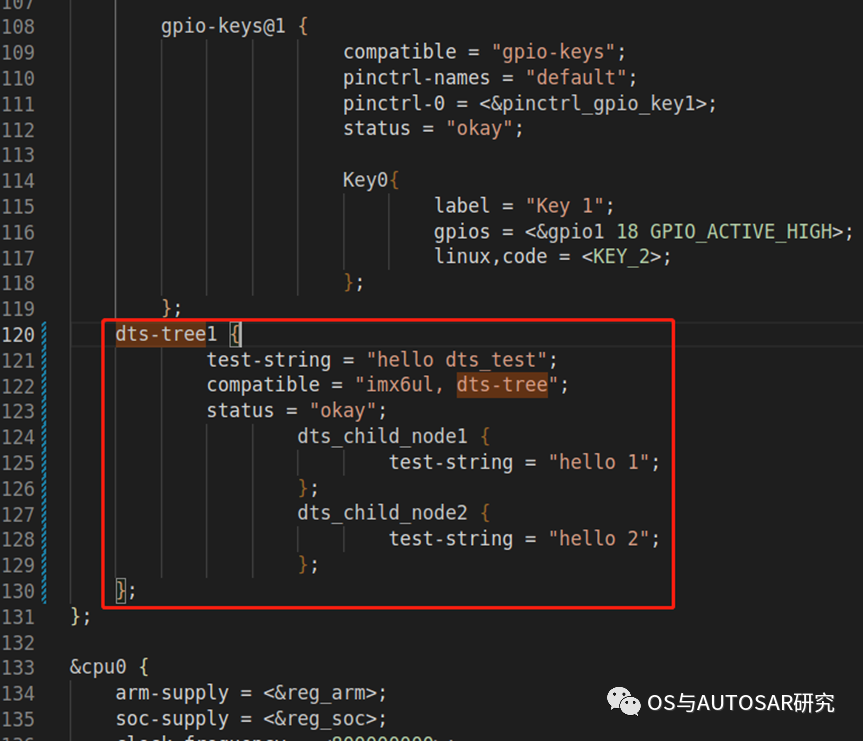
修改完成后执行make dtbs 重新编译设备树文件,编译完成后arch/arm/boot/dts/100ask_imx6ull_qemu.dtb,将其下载到芯片中。
或者用qemu运行的时候,修改参考指向这个新的dtb文件。
查看设备树节点进入内核,执行
| ls /proc/device-tree/ |
我们会发现刚刚创建的设备树节已经存在了
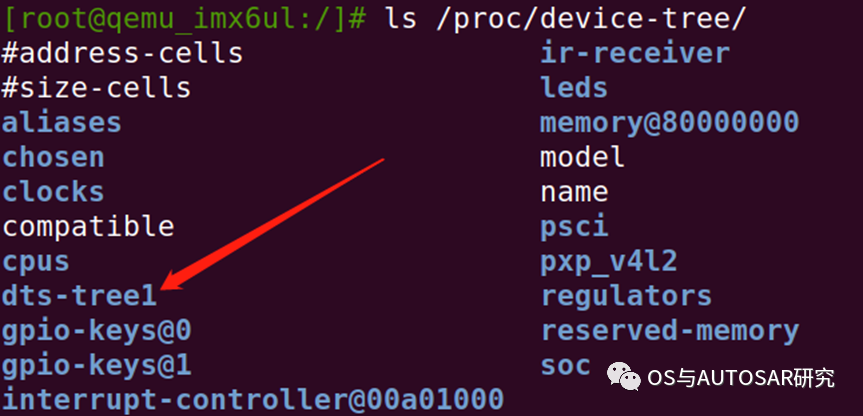

跟我们在dts里面修改的一样,这里变成了一个个的文件形式。文件的名字是属性的名字,内容是值。
具体看看节点的内容,执行

4.2 内核中添加驱动模块
参考:Linux驱动实践:带你一步一步编译内核驱动程序 - IOT物联网小镇 - 博客园
在/drivers文件夹下创建dts_test文件夹,然后创建Kconfig文件
| Bash |
创建Makefile文件
| JavaScript |
在drivers文件夹下的Kconfig和Makefile文件中分别添加
| C |
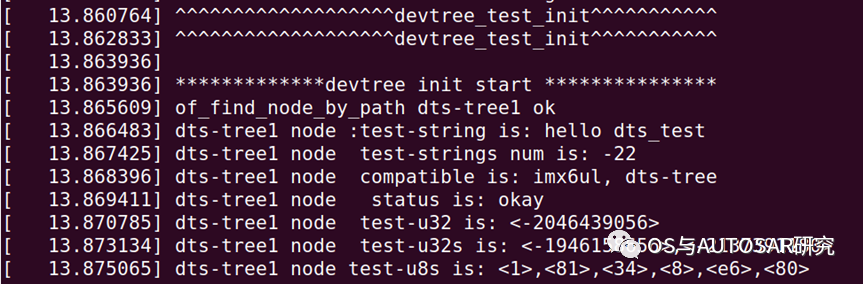
创建dts_test.c文件
| C++ |
Kconfig中是y,这样系编译运行后,会直接看到打印:
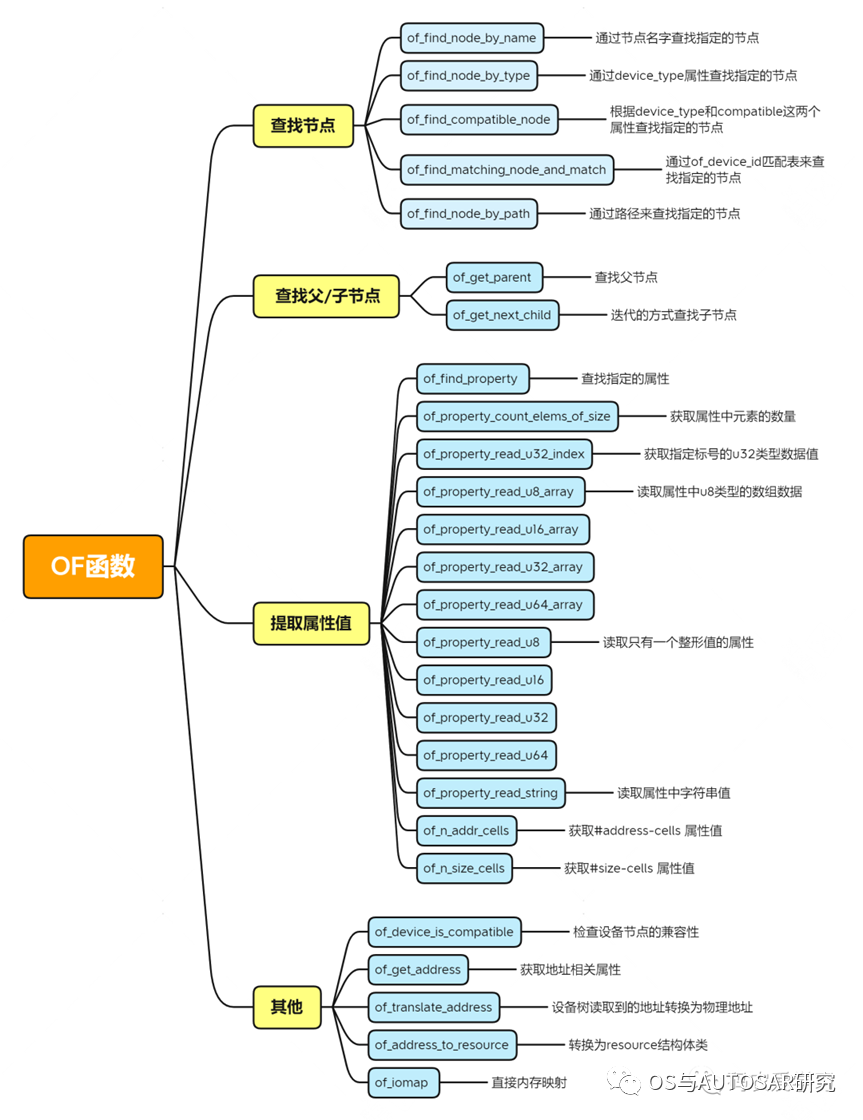
4.3 常用OF API
linux 内核中和设备树相关的函数内核关于设备树的驱动都放在/drivers/of下,用户可以使用这里面的函数对设备树进行操作。
后记:
入门系列还是比较适合公众号,一些零碎的拓展知识面学习。总感觉这种查询式的学习不利于系统的掌握一项技能,可以这么说:高手都不是这么学习的。答案估计是实际的工作经验+看书。系统深入的学习技术首先科班出身很重要,例如计算机专业四大专业课,然后就是对计算机经典书籍的阅读。
在工作中可能遇到问题了,查点资料,感觉可能也就学了点奇巧淫技,这里需要把经验性的知识和理论性的知识区分开,这就是科学与技术的区别,经验性的知识没有师傅带就完蛋了,可以多寻求帮助,但是理论性的东西就需要看书,愿大家能沉下心来找点经典大部头书“读上那么一读,确实挺不错的”。