为了使分布式实时仿真系统(一个典型代表就行飞行模拟器)达到逼真的仿真效果,在系统内部,往往不仅需要对各种数据模型进行实时解算,而且需要一个延迟时间极低的确定性网络在系统之间传递数据,这样才能让各个子系统之间协调一致地工作。传统上,我们使用“高速度以太网+上下位机”的解决方案来满足这两方面的需求。受TCP/IP协议所限,传统的以太网并不能满足各实时仿真子系统间实时、确定地传输数据的需求。尽管可以采取一些措施(如提高网络速度、降低网络负荷等)来降低延迟,但是仍然很难从根本上解决以太网不具有实时性和确定性的固有缺陷,并且这样做均会增加额外的成本。
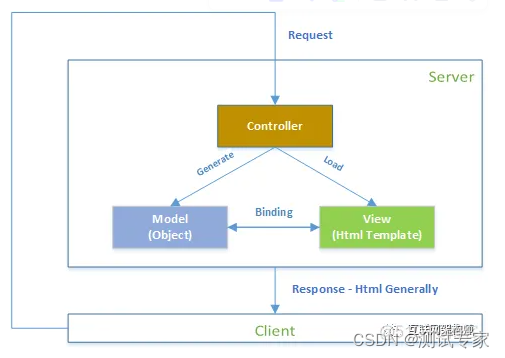
传统的“上下位机”的主从开发模式方案如图1所示,即实时仿真子系统中的实时计算任务在下位机(嵌入式实时操作系统,如VxWorks、RTLinux、QNX等)中执行,而包括界面显示在内的非实时计算任务则在上位机(Windows操作系统)中运行。这样,在满足实时计算任务对实时性的需求的同时,还利用了 Windows操作系统对开发工具(如Visual Studio等)和图形显示接口(GUI)的强大支持等优点,从而在一定程度上提高了界面显示部分的开发效率。
上下位机主从开发模型是一种常见的嵌入式系统开发模型,该模型使用两台计算机(或嵌入式设备),一台作为上位机,另一台作为下位机。下位机是负责采集传感器数据、执行控制指令和控制外设的设备,而上位机则负责处理和显示下位机发送的数据以及发送控制命令到下位机。在这种模型中,下位机通常运行着一个实时操作系统(RTOS),可以进行实时数据采集和处理。上位机则通常运行着一个基于图形化界面的软件,可以方便地实现数据展示和交互控制。
但是该解决方案有着固有的局限性,(I)上下位机带来了高费用、高成本和低可靠性。(2)复杂的分布式应用程序。(3)总线的传输性能容易成为系统总体性能的瓶颈。
新的应用再于实时性的保证和数据的完整性,一台机器和多点分布。光纤反射内存卡,可以不占用机器内存。