推荐:用 NSDT编辑器 快速搭建可编程3D场景
机器人手臂的用途各不相同,但大多数都能够执行拾取和放置任务,而有些则配备用于 CNC 工作、激光雕刻,甚至 3D 打印。 机械臂具有广泛的应用和各个领域,从执行精密手术和进行工业操作,到用于学习和互动的有趣玩具。
拥有自己的机器人手臂有多种选择,你可以简单地购买一个,或者使用 3D 打印机,轻松地自己设计和建造一个。 这些 DIY 手臂可以定制和修改,同时具有成本效益。
由于在决定购买或打印合适的机器人手臂时,需要筛选数百种出色的设计和项目,因此我们将列表范围缩小到当今可用的最佳和最受欢迎的 12 种机器人手臂。 其中包括你可以DIY或购买的机械臂。
如果需要查看机械臂的STEP或STL图纸,可以使用NSDT 3DConvert这个在线3D格式转换工具,免去了本地安装软件的麻烦:

在开始讨论这些选项之前,让我们先看看一些有关机械臂的基本概念和重要术语。
1、机械臂的基本概念
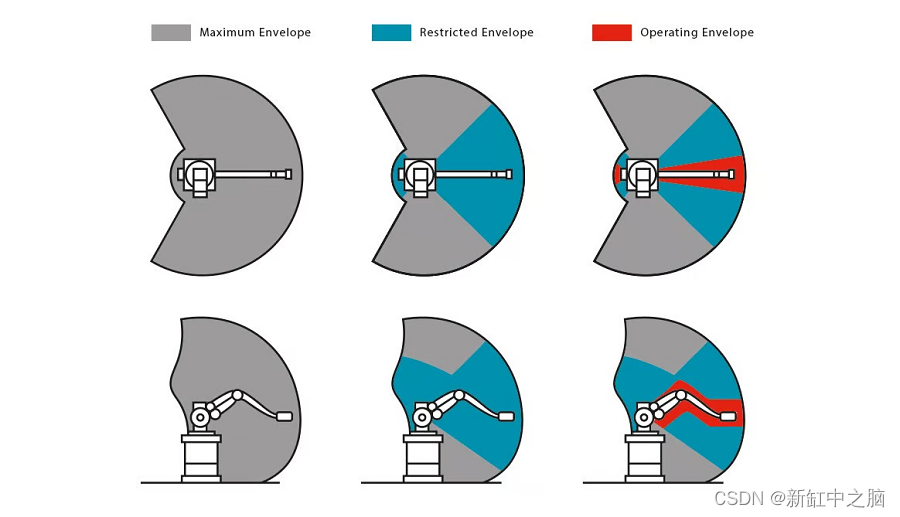
机器人手臂有不同的样式,但大多数都遵循相同的一般运动原理。 与3D打印机等笛卡尔机器不同,机械臂利用极坐标系进行运动,并具有弧形工作区域。 机器人手臂的独特之处在于,与具有类似功能的其他机器相比,它们的占地面积不会限制它们,并且占用的空间非常小。
我们可以在上图中看到机器人手臂的各种封套。 机器人的最大包络线是它可以穿越的区域。 受限包络线表示机器人可以工作的区域,它受到关节数量、范围和类型(线性或角度)的限制。 最后,操作范围是机器人将操作的区域,并且可以通过例如限位开关来限制。
除了笛卡尔机器人手臂之外,还有其他几种机器人手臂配置,例如圆柱形、球形、选择性柔顺关节机器人手臂 (SCARA) 和 Delta(或平行)机器人。
机器人手臂通常用其自由度 (DOF) 来表示。 该术语表示特定手臂上旋转关节或轴的数量; 例如,四自由度手臂可以在四个独立的关节处旋转。 自由度越多,可能的运动范围就越大。
接下来的这些项目完全是 开源并且可以DIY 的,并且所有项目都需要使用 3D 打印机来打印某些组件。
1、Eezybotarm Mk2
原始 Eezybotarm 的更大更强的迭代
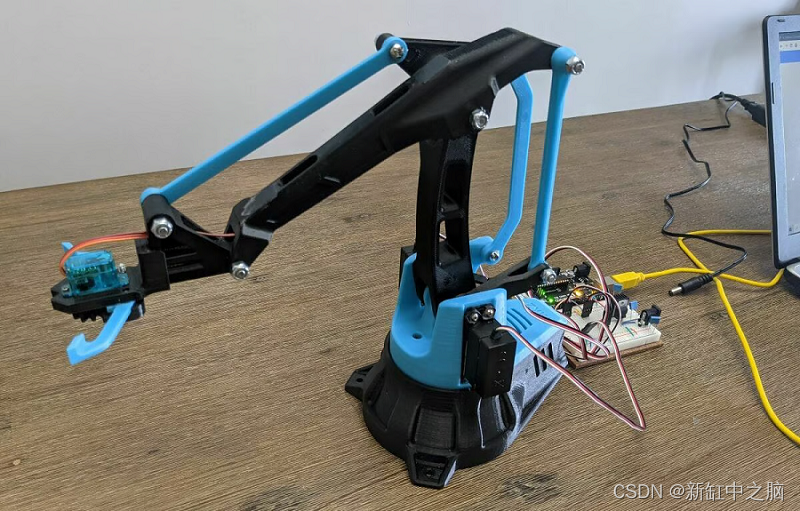
Eezybotarm Mk2 是 4 自由度手臂的典范,完全采用 3D 打印而成,并具有出色的组装说明。 该机器人手臂赢得了多项比赛,可能是最简单的手臂设计之一。 还有一个 Mk3 正在开发中。
该项目旨在让用户尝试不同的控制方法。 你可以使用计算机控制该机械臂执行各种动作,并且可以存储伺服位置序列以供以后播放,一次或循环播放。 你甚至不需要计算机即可完成此操作; 可以对其进行编程,使其在按下按钮时播放。
该项目旨在具有教育意义,并且在 Thingiverse 上有超过 120 个制作和 43 个remixes,这表明它是可复制和可定制的。 这是一个将机器人技术与 3D 打印相结合的伟大项目。
- 自由度:4
- 难度级别: 简单
- 下载地址:Eezyrobots、Thingiverse、Instructables
2、MeArm
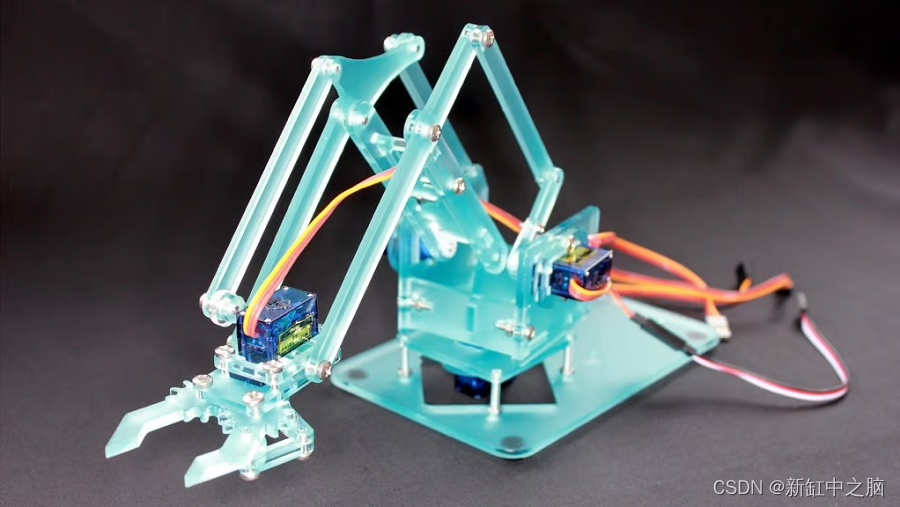
MeArm 是最流行的机器人手臂设计之一,这是有充分理由的。 它由可激光切割或 3D 打印的简单部件制成,并具有坚固而简单的 4 自由度设计。
这一流行设计在 Thingiverse 上有 15 个 Makes 和 12 个 Remixes,在 Instructables 上有 24 个共享项目,凸显了其可复制性。 该手臂由四个伺服系统和一个 Arduino Uno 或一个 Raspberry Pi 提供动力,有多种不同颜色的套件可供选择,或者您也可以自己构建。
- 自由度:4
- 难度级别: 简单
- 下载地址:Instructables、Hackaday、Thingiverse
3、Kauda

Kauda 机械臂设计简单,文档直观明了。 这些组件完全开源,并且零件可 3D 打印,因此价格实惠。 因此,它是最适合初学者的机器人项目之一。
该五自由度手臂装有三个步进电机和两个伺服电机。 与 Arduino 控制器结合使用时,它可以让你实现快速且受控的运动。 该机器人的底座设计用于封装带有 CNC 防护罩的 Arduino Mega。 您可以通过使用一些可选组件(例如光耦合器、LED 和 12V 信号灯)使项目变得更加有趣。
- 自由度:5
- 难度级别: 简单
- 下载地址:DIY TECH、Instructables
4、BCN3D 移动

BCN3D Moveo 是一款令人印象深刻的 4 自由度手臂,由 Arduino 控制。 它是完全 3D 打印和开源的,并且已经作为教育工具进行了测试,其中许多已经在学校中使用。
由于是开源的,它不限于其预期用途,因此可以对其进行修改以完成任何人的各种任务,从专业的 DIY 爱好者到机器人专家。 这款机器人手臂拥有 10 个品牌和 15 个混音版,在 Thingiverse 上的下载量超过 130,000 次,显然具有可复制性和可定制性。
- 自由度:4
- 难度级别:中级
- 下载地址:GitHub、Thingiverse
5、Zortrax Robotic Arm

Zortrax 机器人手臂采用 5 自由度设计,就其尺寸而言不一定是最坚固的,最大有效载荷仅为 100 克。 尽管如此,它的全 3D 打印设计令人印象深刻,值得一提。 它的独特之处在于只有三个轴由动力驱动,而其他轴则由手动定位。
这个手臂是为一组可互换的工具头而设计的,它可以递给你一把螺丝刀,甚至可以给你一个拳头碰撞——无论你想做什么。
除了网站的信息和文件之外,还有材料清单和组装指南,包括电子要求和编程。
- 自由度:5
- 难度级别:中级
- 下载地址:Zortrax、Instructables
6、 Arduino Robot Arm
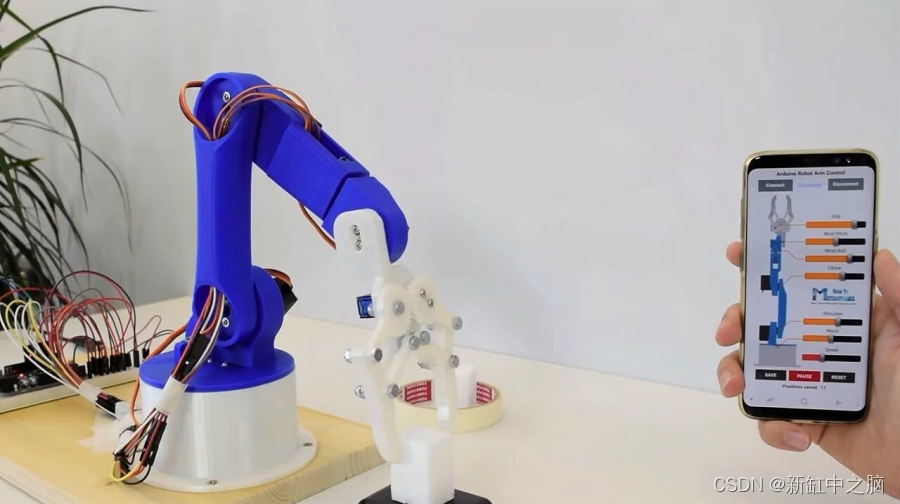
如果想要通过应用程序无线控制机械臂,该项目是理想的选择。 使用可在下载指南中找到的自定义 Android 应用程序,你可以从手机屏幕上管理和编程这个由 Arduino 驱动的机械臂。
这个 Android 应用程序是使用 MIT App Inventor 构建的。 应用程序中的滑块有助于移动机器人手臂关节处的伺服系统。 一个单独的滑块可以控制机器人手臂的运动速度。 最后,你可以添加一个“保存”按钮,记录手臂的位置并重播它以执行操作。
- 自由度:5
- 难度级别:中级
- 下载地址:How To Mechatronics
7、Thor

该项目的主要目标是创建一个可在学校和大学中使用的机器人,以向学生传授机器人技术。 该手臂由 Hackaday 制作者 AngelLM、Dan Royer 和 dannyvandenheuvel 开发,完全开源且可 3D 打印。
它是一个 6 自由度臂,最大可承载 750 g 的负载,并且具有独特的设置,可实现极大的灵活性。 Arduino Mega 作为机器人的主控制板。 此外,开发人员还为步进电机创建了防护罩。 该项目中使用的大多数硬件组件都是你可以在 DIY 3D 打印机中找到的硬件组件。
- 自由度:6
- 难度级别:中级
- 下载地址:Hackaday
接下来,我们为那些想要构建自己的机器人但又不想花时间采购所有零件的人提供了一些套件! 这些套件包含创建功能齐全的机器人手臂所需的一切,包括完整的构建说明。
8、OWI Edge – Wireless

OWI Edge是另一种 4 自由度设计,是一款用于教育目的的简单手臂。 它仅作为套件提供,但可以购买额外的 CPU 接口,从而允许有限的编程操作。 它采用 USB 接口形式,包括 CD 和电路板。
由直流电机驱动,没有编码器,精度有限,使得这款机械臂更适合用作玩具。 我们将其列入此列表是因为对于对机器人技术和技术感兴趣的学生来说,它是一个很棒的套件,并且在无聊的午休时间它也是一个很棒的“桌面玩具”。 它还可以进行广泛修改,作为 Arduino 项目和其他 DIY 用途的平台。
- 自由度:4
- 难度级别: 简单
- 购买地址:亚马逊
- 大约价格:50 美元
9、Adeept
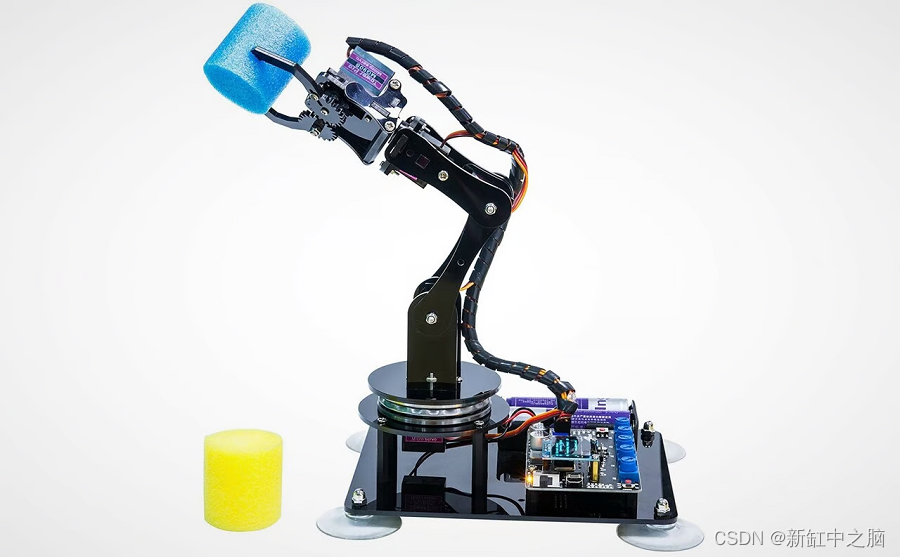
Adeept 的机械臂是市场上一款出色的入门级机械臂。 它是使用 Arduino 开发的,因此完全开源。 此外,Adeept 机器人手臂能够记录动作,然后自行执行。 手臂上有一个 OLED 显示屏,显示机器人的当前位置和剩余步数。
该手臂可以手动和远程操作。 在驱动板上,电位器可以手动控制手臂的运动。 或者,可以使用 PC 软件来实现相同的控制。 你可以借助其网站上提供的教程创建自己的 Adeept 手臂 PC 控制 GUI 应用程序。
- 自由度:5
- 难度级别:中级
- 购买地址:亚马逊
- 大约价格:70 美元
10、LewanSoul xArm
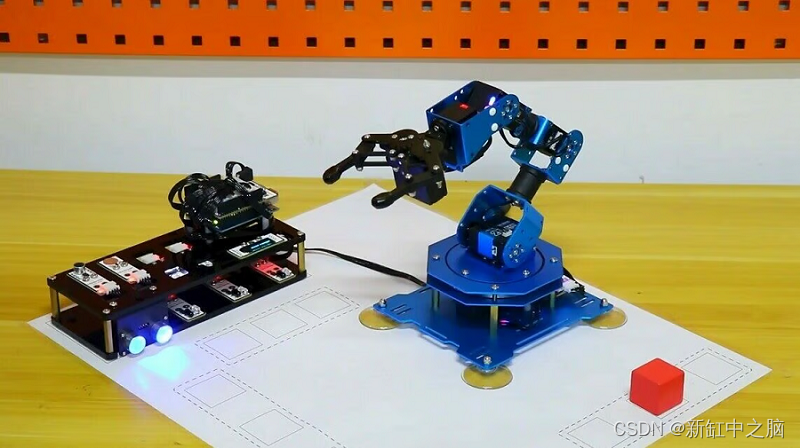
LewanSoul 的这款机械臂采用金属机身,可提供精确的控制和多种动作。 这可以通过串行总线伺服电机来实现,该电机还可以监控系统的电压、温度和角度。
凭借其坚固的结构,它的有效负载能力为 250 克。 xArm 套件配有控制器,但如果你选择的话,也可以使用 PC 鼠标和软件来实现相同的目标。 它还具有与 Android 和 Apple 设备配合使用的无线模块,以便你可以远程控制它。
- 自由度:6
- 难度级别:中级
- 购买地址:亚马逊
- 大约价格:200美元
11、UFactory uArm
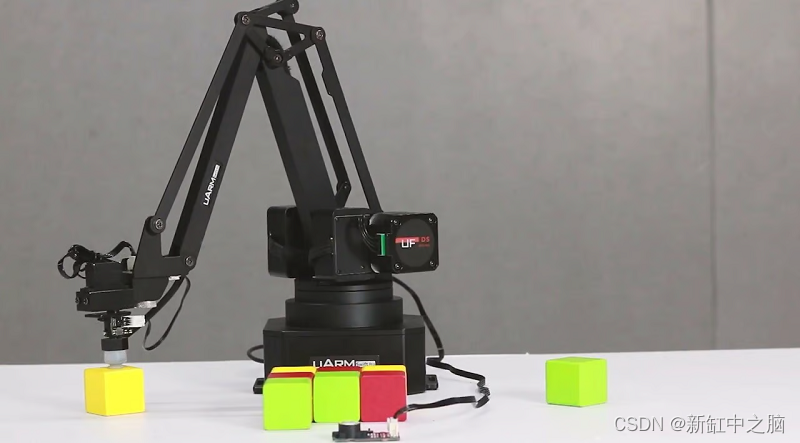
uArm 可能是此列表中最通用的机器人手臂之一,目前已推出第三组商用变体:uArm Swift 和更先进的 Swift Pro。 它是一个 4 自由度手臂,号称具有高达 0.2 毫米的精确精度。
该机器人手臂是开源的,与 Arduino、Raspberry Pi 和 Seeed Studio Grove 套件兼容。 其独特之处在于,当配备适当的工具头时,Swift Pro 可以进行激光雕刻和 3D 打印,并且无需计算机即可“学习”动作。
- 自由度:4
- 难度级别: 简单
- 购买地址:UFactory
- 大约价格:800 美元
12、PincherX 100

这款机器人手臂不是你可以自己建造的,但它确实包含 3D 打印零件,对于那些没有时间搞组装的人来说,这是一个很好的教育工具。 它附带教学视频和演示,因此你可以在一小时内让它工作!
PincherX 100 发货时已完全组装,但为了向我们清单上的其他产品致敬,手臂的一些组件是使用 ABS 3D 打印的。 这种材料的使用确保了它既轻又坚固,重量不到一公斤。 该机器人的工作负载约为 50 g,重复精度为 5 mm。
虽然该机器人没有很大的有效负载能力,但它非常适合机器学习和人工智能等应用。 该机械臂附带大量开源演示和软件包,可帮助你进一步培养技能。
- 自由度:4
- 难度级别: 简单
- 购买地址:Trossen Robotics
- 大约价格:550 美元
原文链接:12个最佳3D打印机械臂 — BimAnt