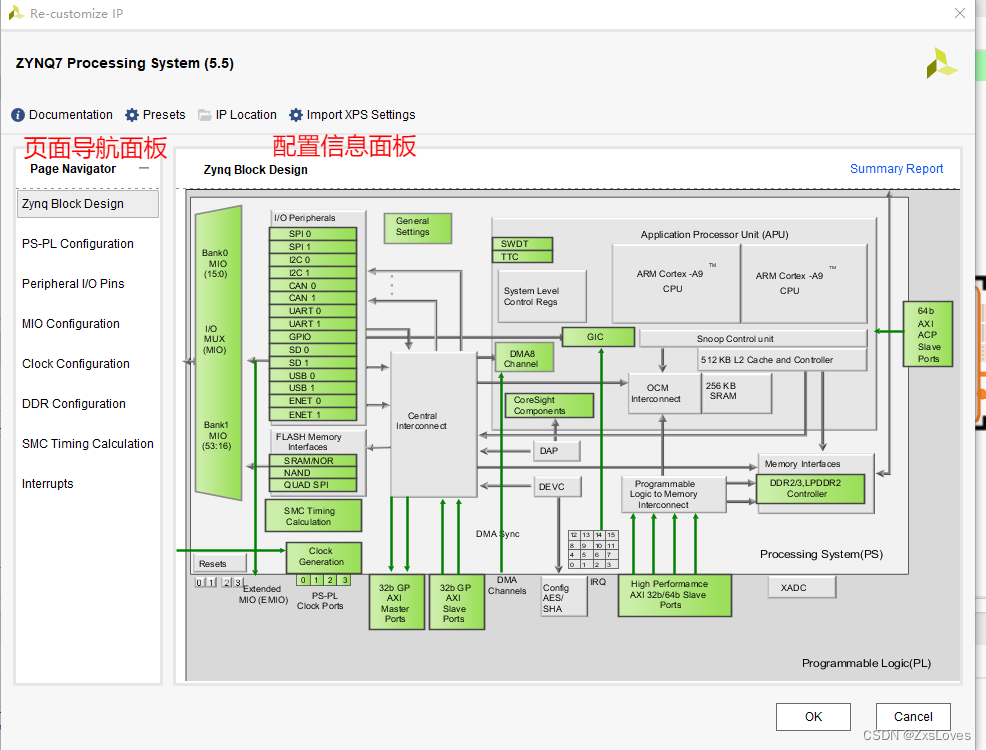
原图
//对输入图像进行细化
cv::Mat ThinLine(const cv::Mat& matsrc, const int& iterations)
{//CvSize size = cvGetSize(src);cv::Mat dst = matsrc.clone();//拷贝一个数组给另一个数组int _iwidth = dst.cols;int _iheight = dst.rows;int n = 0, i = 0, j = 0;for (n = 0; n < iterations; n++){cv::Mat temp = dst.clone();for (i = 0; i < temp.rows; i++){for (int j = 0; j < temp.cols; j++){if ((*temp.ptr<uchar>(i, j)) == 1){int ap = 0;int p2 = (i == 0) ? 0 : (*temp.ptr<uchar>(i - 1, j));int p3 = (i == 0 || j == _iwidth - 1) ? 0 : (*temp.ptr<uchar>(i - 1, j + 1));if (p2 == 0 && p3 == 1){ap++;}int p4 = (j == _iwidth - 1) ? 0 : (*temp.ptr<uchar>(i, j + 1));if (p3 == 0 && p4 == 1){ap++;}int p5 = (i == _iwidth - 1 || j == _iwidth - 1) ? 0 : (*temp.ptr<uchar>(i + 1, j + 1));if (p4 == 0 && p5 == 1){ap++;}int p6 = (i == _iwidth - 1) ? 0 : (*temp.ptr<uchar>(i + 1, j));if (p5 == 0 && p6 == 1){ap++;}int p7 = (i == _iwidth - 1 || j == 0) ? 0 : (*temp.ptr<uchar>(i + 1, j - 1));if (p6 == 0 && p7 == 1){ap++;}int p8 = (j == 0) ? 0 : (*temp.ptr<uchar>(i, j - 1));if (p7 == 0 && p8 == 1){ap++;}int p9 = (i == 0 || j == 0) ? 0 : (*temp.ptr<uchar>(i - 1, j - 1));if (p8 == 0 && p9 == 1){ap++;}if (p9 == 0 && p2 == 1){ap++;}if ((p2 + p3 + p4 + p5 + p6 + p7 + p8 + p9) > 1 && (p2 + p3 + p4 + p5 + p6 + p7 + p8 + p9) < 7){if (ap == 1){if (p2 * p4 * p8 == 0){if (p2 * p6 * p8 == 0){(*dst.ptr<uchar>(i, j)) = 0;}}}}}}}}//将二值图像转换成灰度,以便显示for (i = 0; i < dst.rows; i++){for (j = 0; j < dst.cols; j++){if ((*dst.ptr<uchar>(i, j)) == 1){(*dst.ptr<uchar>(i, j)) = 255;}else{(*dst.ptr<uchar>(i, j)) = 0;}}}return dst;
}void LineDistance()
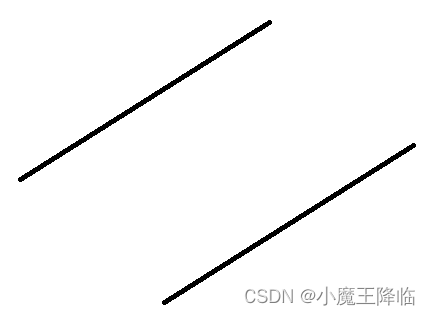
{cv::Mat src = cv::imread("平行线求距离.png", cv::IMREAD_COLOR);cv::Mat gray;cv::cvtColor(src, gray, cv::COLOR_BGR2GRAY);cv::Mat thre;cv::threshold(gray, thre, 128, 1, cv::THRESH_BINARY_INV);//第一步 对图像中的直线进行细化cv::Mat line = ThinLine(thre, 50);//第二步 提取直线的轮廓坐标std::vector<std::vector<cv::Point>> contours;cv::findContours(line, contours, cv::RETR_EXTERNAL, cv::CHAIN_APPROX_NONE);cv::Mat show = src.clone();cv::drawContours(show, contours, -1, cv::Scalar(255));//直线拟合 //拟合结果为一个四元素的容器,比如Vec4f - (vx, vy, x0, y0)//其中(vx, vy) 是直线的方向向量 (x0, y0) 是直线上的一个点cv::Vec4d l0;cv::fitLine(contours[0], l0, cv::DIST_L2, 0, 0.01, 0.01);//拟合方法采用最小二乘法double cos_theta0 = l0[0];double sin_theta0 = l0[1];double x0 = l0[2], y0 = l0[3];double k0 = sin_theta0 / cos_theta0;double b0 = y0 - k0 * x0;printf("line0: y = %f * x + %f \n", k0 * 180.0 / CV_PI, b0);double x = 0;double y = k0 * x + b0;cv::Vec4d l1;//拟合方法采用最小二乘法cv::fitLine(contours[1], l1, cv::DIST_L2, 0, 0.01, 0.01);double cos_theta1 = l1[0];double sin_theta1 = l1[1];double x1 = l1[2], y1 = l1[3];double k1 = sin_theta1 / cos_theta1;double b1 = y1 - k1 * x1;printf("line1: y = %f * x + %f \n", k1 * 180.0 / CV_PI, b1);//第四部 计算两条直线之间的距离 公式是: |b1 - b0| / sqrt(A * A + B * B)double A = k0;double B = 1.0;double dis = abs(b1 - b0) / sqrt(A * A + B * B);printf("dis is %f \n", dis);
}