Linux版本号4.1.15 芯片I.MX6ULL 大叔学Linux 品人间百味 思文短情长
中国文化博大精深,太极八卦,阴阳交合,变化无穷。在程序的开发中也是这样,数字0和1也是同样的道理。就本节来说,输入和输出的万千变化才是程序驱动开发的基石。所以题目为大道至简,就是要说明这个道理。量入为出,不去纠结到底是先有输入还是先有输出。工作中接触最多的传感器就是输入,之后驱动开发根据采集到的输入进行判断比对后输出,也就是我要说的量入为出。
本节开始学习第一个输入驱动的开发---按键驱动开发。主要内容包括按键驱动原理、硬件设计原理、驱动开发和测试。其中最重要的是驱动的开发和测试。
本节的思维导图如下:
一、按键驱动原理
在驱动程序中使用一个整形变量来表示按键值,应用程序通过 read 函数来读取按键值,判断按键有没有按下。保存按键值的变量就是个共享资源,驱动程序要向其写入按键值,应用程序要读取按键值。我们使用原子操作对这个按键值【整型数】进行赋值及读取。
二、硬件原理图
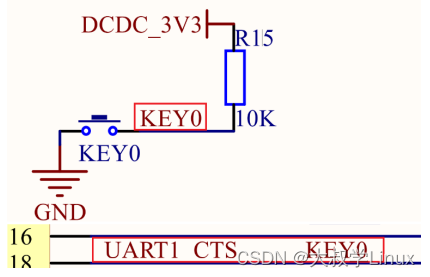
按键 KEY0 是连接到 I.MX6U 的 UART1_CTS 这个 IO 上的, KEY0接了一个 10K 的上拉电阻,因此 KEY0 没有按下的时候 UART1_CTS 应该是高电平,当 KEY0按下以后 UART1_CTS 就是低电平。
三、驱动开发
1.修改设备树文件
1 #ifndef _BSP_GPIO_H
2 #define _BSP_GPIO_H
3 #define _BSP_KEY_H
4 #include "imx6ul.h"
5 /***************************************************************
6 Copyright © zuozhongkai Co., Ltd. 1998-2019. All rights reserved.
7 文件名 : bsp_gpio.h
8 作者 : 左忠凯
9 版本 : V1.0
10 描述 : GPIO 操作文件头文件。
11 其他 : 无
12 论坛 : www.openedv.com
13 日志 : 初版 V1.0 2019/1/4 左忠凯创建
14 ***************************************************************/
15
16 /* 枚举类型和结构体定义 */
17 typedef enum _gpio_pin_direction
18 {
19 kGPIO_DigitalInput = 0U, /* 输入 */
20 kGPIO_DigitalOutput = 1U, /* 输出 */
21 } gpio_pin_direction_t;
22
23 /* GPIO 配置结构体 */
24 typedef struct _gpio_pin_config
25 {
26 gpio_pin_direction_t direction; /* GPIO 方向:输入还是输出 */
27 uint8_t outputLogic; /* 如果是输出的话,默认输出电平 */
28 } gpio_pin_config_t;枚举类型 gpio_pin_direction_t 表示 GPIO 方向,输入或输出。结构体 gpio_pin_config_t 是 GPIO 的配置结构体,里面有 GPIO 的方向和默认输出电平两个成员变量。
1 #include "bsp_gpio.h"
2 /***************************************************************
3 Copyright © zuozhongkai Co., Ltd. 1998-2019. All rights reserved.
4 文件名 : bsp_gpio.h
5 作者 : 左忠凯
6 版本 : V1.0
7 描述 : GPIO 操作文件。
8 其他 : 无
9 论坛 : www.openedv.com
10 日志 : 初版 V1.0 2019/1/4 左忠凯创建
11 ***************************************************************/
12
13 /*
14 * @description : GPIO 初始化。
15 * @param - base : 要初始化的 GPIO 组。
16 * @param - pin : 要初始化 GPIO 在组内的编号。
17 * @param - config : GPIO 配置结构体。
18 * @return : 无
19 */
20 void gpio_init(GPIO_Type *base, int pin, gpio_pin_config_t *config)
21 {
22 if(config->direction == kGPIO_DigitalInput) /* 输入 */
23 {
24 base->GDIR &= ~( 1 << pin);
25 }
26 else /* 输出 */
27 {
28 base->GDIR |= 1 << pin;
29 gpio_pinwrite(base,pin, config->outputLogic);/* 默认输出电平 */
30 }
31 }
32
33 /*
34 * @description : 读取指定 GPIO 的电平值 。
35 * @param – base : 要读取的 GPIO 组。
36 * @param - pin : 要读取的 GPIO 脚号。
37 * @return : 无
38 */
39 int gpio_pinread(GPIO_Type *base, int pin)
40 {
41 return (((base->DR) >> pin) & 0x1);
42 }
43
44 /*
45 * @description : 指定 GPIO 输出高或者低电平 。
46 * @param – base : 要输出的的 GPIO 组。
47 * @param - pin : 要输出的 GPIO 脚号。
48 * @param – value : 要输出的电平, 1 输出高电平, 0 输出低低电平
49 * @return : 无
50 */
51 void gpio_pinwrite(GPIO_Type *base, int pin, int value)
52 {
53 if (value == 0U)
54 {
55 base->DR &= ~(1U << pin); /* 输出低电平 */
56 }
57 else
58 {
59 base->DR |= (1U << pin); /* 输出高电平 */
60 }
61 } 函数 gpio_init 用于初始化指定的 GPIO 引脚,最终配置的是 GDIR 寄存器,此函数有三个参数,这三个参数的含义如下:
base: 要初始化的 GPIO 所属于的 GPIO 组,比如 GPIO1_IO18 就属于 GPIO1 组。
pin: 要初始化 GPIO 在组内的标号,比如 GPIO1_IO18 在组内的编号就是 18。
config: 要初始化的 GPIO 配置结构体,用来指定 GPIO 配置为输出还是输入。
函数 gpio_pinread 是读取指定的 GPIO 值,也就是读取 DR 寄存器的指定位,此函数有两个
参数和一个返回值,参数含义如下:
base: 要读取的 GPIO 所属于的 GPIO 组,比如 GPIO1_IO18 就属于 GPIO1 组。
pin: 要读取的 GPIO 在组内的标号,比如 GPIO1_IO18 在组内的编号就是 18。
返回值: 读取到的 GPIO 值,为 0 或者 1。
函数 gpio_pinwrite 是控制指定的 GPIO 引脚输入高电平(1)或者低电平(0),就是设置 DR 寄
存器的指定位,此函数有三个参数,参数含义如下:
base: 要设置的 GPIO 所属于的 GPIO 组,比如 GPIO1_IO18 就属于 GPIO1 组。
pin: 要设置的 GPIO 在组内的标号,比如 GPIO1_IO18 在组内的编号就是 18。
value: 要设置的值, 1(高电平)或者 0(低电平)。
以后就可以使用函数 gpio_init 设置指定 GPIO 为输入还是输出,使用函数 gpio_pinread和 gpio_pinwrite 来读写指定的 GPIO。
2.按键驱动
15 /* 定义按键值 */
16 enum keyvalue{
17 KEY_NONE = 0,
18 KEY0_VALUE,
19 };bsp_key.h 文件中定义了一个枚举类型: keyvalue, 此枚举类型表示按键值。
1 #include "bsp_key.h"
2 #include "bsp_gpio.h"
3 #include "bsp_delay.h"
4 /***************************************************************
5 Copyright © zuozhongkai Co., Ltd. 1998-2019. All rights reserved.
6 文件名 : bsp_key.c
7 作者 : 左忠凯
8 版本 : V1.0
9 描述 : 按键驱动文件。
10 其他 : 无
11 论坛 : www.openedv.com
12 日志 : 初版 V1.0 2019/1/4 左忠凯创建
13 ***************************************************************/
14
15 /*
16 * @description : 初始化按键
17 * @param : 无
18 * @return : 无
19 */
20 void key_init(void)
21 {
22 gpio_pin_config_t key_config;
23
24 /* 1、初始化 IO 复用, 复用为 GPIO1_IO18 */
25 IOMUXC_SetPinMux(IOMUXC_UART1_CTS_B_GPIO1_IO18, 0);
26
27 /* 2、、配置 UART1_CTS_B 的 IO 属性
28 *bit 16:0 HYS 关闭
29 *bit [15:14]: 11 默认 22K 上拉
30 *bit [13]: 1 pull 功能
31 *bit [12]: 1 pull/keeper 使能
32 *bit [11]: 0 关闭开路输出
33 *bit [7:6]: 10 速度 100Mhz
34 *bit [5:3]: 000 关闭输出
35 *bit [0]: 0 低转换率
36 */
37 IOMUXC_SetPinConfig(IOMUXC_UART1_CTS_B_GPIO1_IO18, 0xF080);
38
39 /* 3、初始化 GPIO GPIO1_IO18 设置为输入*/
40 key_config.direction = kGPIO_DigitalInput;
41 gpio_init(GPIO1,18, &key_config);
42
43 }
44
45 /*
46 * @description : 获取按键值
47 * @param : 无
48 * @return : 0 没有按键按下,其他值:对应的按键值
49 */
50 int key_getvalue(void)
51 {
52 int ret = 0;
53 static unsigned char release = 1; /* 按键松开 */
54
55 if((release==1)&&(gpio_pinread(GPIO1, 18) == 0)) /* KEY0 按下 */
56 {
57 delay(10); /* 延时消抖 */
58 release = 0; /* 标记按键按下 */
59 if(gpio_pinread(GPIO1, 18) == 0)
60 ret = KEY0_VALUE;
61 }
62 else if(gpio_pinread(GPIO1, 18) == 1) /* KEY0 未按下 */
63 {
64 ret = 0;
65 release = 1; /* 标记按键释放 */
66 }
67
68 return ret;
69 }bsp_key.c 中一共有两个函数: key_init 和 key_getvalue, key_init 是按键初始化函数,用来初始化按键所使用的 UART1_CTS 这个 IO。
函数 key_init 先设置 UART1_CTS 复用为GPIO1_IO18,然后配置 UART1_CTS 这个 IO 为速度为 100MHz,默认 22K 上拉。最后调用函数 gpio_init 来设置 GPIO1_IO18 为输入功能。
函数 key_getvalue 用于获取按键值,此函数没有参数,只有一个返回值,返回值表示按键
值,返回值为 0 的话就表示没有按键按下,如果返回其他值的话就表示对应的按键按下了。获
取按键值其实就是不断的读取 GPIO1_IO18 的值,如果按键按下的话相应的 IO 被拉低,那么
GPIO1_IO18 值就为 0,如果按键未按下的话 GPIO1_IO18 的值就为 1。此函数中静态局部变量
release 表示按键是否释放。
第57 行是按键消抖延时函数,这个很多地方都有讲的,很简单,就不赘述了。
1 #include "bsp_clk.h"
2 #include "bsp_delay.h"
3 #include "bsp_led.h"
4 #include "bsp_beep.h"
5 #include "bsp_key.h"
6
7 /*
8 * @description : main 函数
9 * @param : 无
10 * @return : 无
11 */
12 int main(void)
13 {
14 int i = 0;
15 int keyvalue = 0;
16 unsigned char led_state = OFF;
17 unsigned char beep_state = OFF;
18
19 clk_enable(); /* 使能所有的时钟 */
20 led_init(); /* 初始化 led */
21 beep_init(); /* 初始化 beep */
22 key_init(); /* 初始化 key */
23
24 while(1)
25 {
26 keyvalue = key_getvalue();
27 if(keyvalue)
28 {
29 switch (keyvalue)
30 {
31 case KEY0_VALUE:
32 beep_state = !beep_state;
33 beep_switch(beep_state);
34 break;
35 }
36 }
37 i++;
38 if(i==50)
39 {
40 i = 0;
41 led_state = !led_state;
42 led_switch(LED0, led_state);
43 }
44 delay(10);
45 }
46 return 0;
47 } main.c 函数先初始化 led 灯、蜂鸣器和按键,然后在 while(1)循环中不断的调用函数
key_getvalue 来读取按键值,如果 KEY0 按下的话就打开/关闭蜂鸣器。 LED0 作为系统提示指
示灯闪烁,闪烁周期大约为 500ms。
四、测试
前面几节课中的通用 Makefile,修改变量 TARGET 为 key,在变量 INCDIRS和 SRCDIRS 中追加“ bsp/gpio” 和“ bsp/key”。
1 CROSS_COMPILE ?= arm-linux-gnueabihf-
2 TARGET ?= key
3
4 /* 省略掉其它代码...... */
5
6 INCDIRS := imx6ul \
7 bsp/clk \
8 bsp/led \
9 bsp/delay \
10 bsp/beep \
11 bsp/gpio \
12 bsp/key
13
14 SRCDIRS := project \
15 bsp/clk \
16 bsp/led \
17 bsp/delay \
18 bsp/beep \
19 bsp/gpio \
20 bsp/key
21
22 /* 省略掉其它代码...... */
23
24 clean:
25 rm -rf $(TARGET).elf $(TARGET).dis $(TARGET).bin $(COBJS) $(SOBJS)第 2 行修改变量 TARGET 为“ key”,也就是目标名称为“ key”。
第 11、 12 行在变量 INCDIRS 中添加 GPIO 和按键驱动头文件(.h)路径。
第 19、 20 行在变量 SRCDIRS 中添加 GPIO 和按键驱动文件(.c)路径。
使用 Make 命令编译代码,编译成功以后使用软件 imxdownload 将编译完成的 key.bin 文件
下载到 SD 卡中,命令如下:
chmod 777 imxdownload //给予 imxdownload 可执行权限,一次即可
./imxdownload key.bin /dev/sdd //烧写到 SD 卡中
烧写成功以后将 SD 卡插到开发板的 SD 卡槽中,然后复位开发板。如果代码运行正常的
话 LED0 会以大约 500ms 周期闪烁, 按下开发板上的 KEY0 按键,蜂鸣器打开,再按下 KEY0
按键,蜂鸣器关闭。
五、总结
这一节是非常重要的一个内容,作为驱动开发基石的输入和输出一定要学会记牢。主要内容包括按键驱动原理、硬件设计原理、驱动开发和测试。其中最重要的是驱动的开发和测试。