文章目录
- 前言
- 举例解释
- 函数的序言
- 函数的调用栈
- 数据的传递
- 总结
前言
举例解释
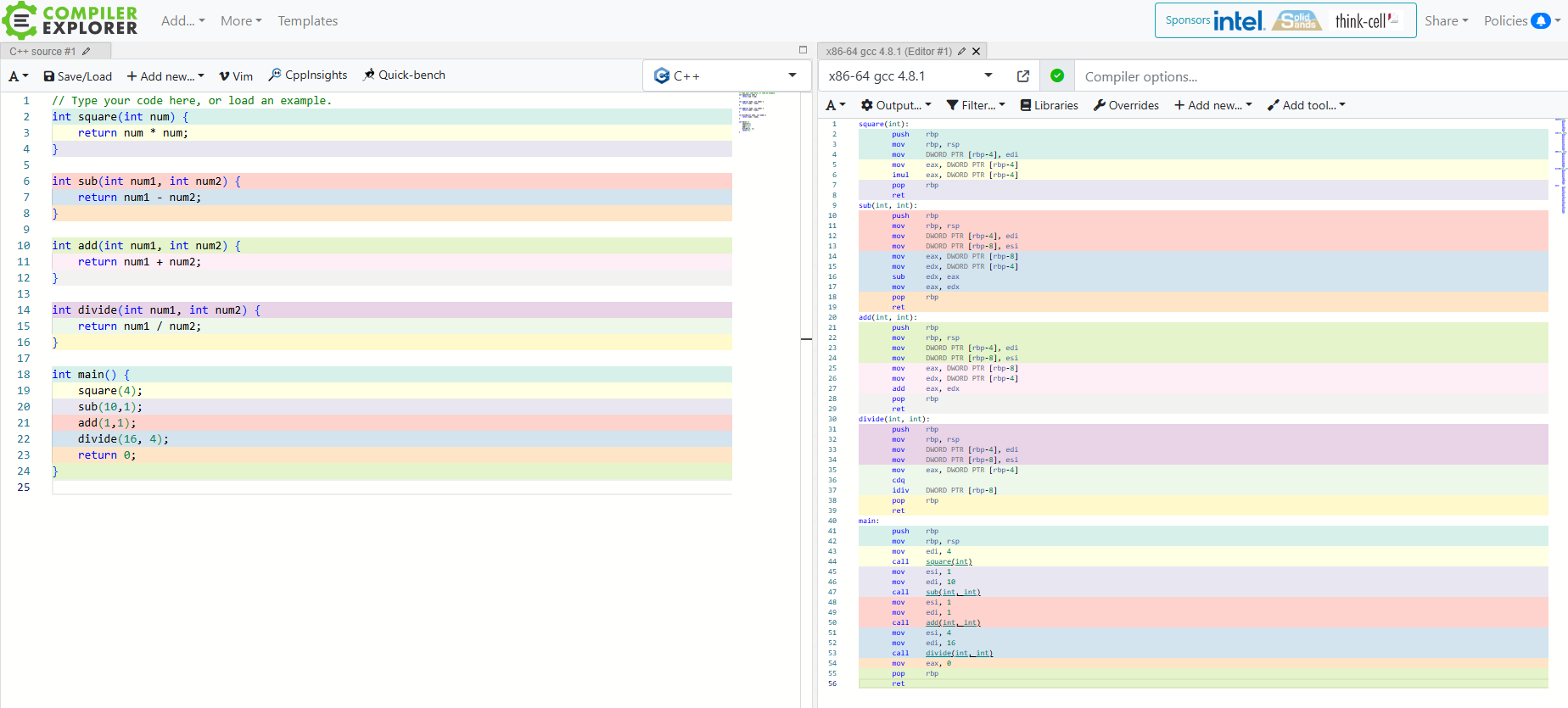
// Type your code here, or load an example.
int square(int num) {return num * num;
}int sub(int num1, int num2) {return num1 - num2;
}int add(int num1, int num2) {return num1 + num2;
}int divide(int num1, int num2) {return num1 / num2;
}int main() {square(4);sub(10,1);add(1,1);divide(16, 4);return 0;
}
可使用 Compiler Explorer 在线转为汇编
对应的汇编:
square(int):push rbpmov rbp, rspmov DWORD PTR [rbp-4], edimov eax, DWORD PTR [rbp-4]imul eax, DWORD PTR [rbp-4]pop rbpret
sub(int, int):push rbpmov rbp, rspmov DWORD PTR [rbp-4], edimov DWORD PTR [rbp-8], esimov eax, DWORD PTR [rbp-8]mov edx, DWORD PTR [rbp-4]sub edx, eaxmov eax, edxpop rbpret
add(int, int):push rbpmov rbp, rspmov DWORD PTR [rbp-4], edimov DWORD PTR [rbp-8], esimov eax, DWORD PTR [rbp-8]mov edx, DWORD PTR [rbp-4]add eax, edxpop rbpret
divide(int, int):push rbpmov rbp, rspmov DWORD PTR [rbp-4], edimov DWORD PTR [rbp-8], esimov eax, DWORD PTR [rbp-4]cdqidiv DWORD PTR [rbp-8]pop rbpret
main:push rbpmov rbp, rspmov edi, 4call square(int)mov esi, 1mov edi, 10call sub(int, int)mov esi, 1mov edi, 1call add(int, int)mov esi, 4mov edi, 16call divide(int, int)mov eax, 0pop rbpret
函数的序言
https://zhuanlan.zhihu.com/p/368962727
push rbp
mov rbp, rsp
...
pop rbp
sqaure前面的push rbp 和mov rbp, rsp又叫做函数的序言(prologue),几乎每个函数一开始都会有的指令。它和函数最后的pop rbp和ret(epilogue)起到维护函数的调用栈的作用。
函数的调用栈
数据的传递
数据的传递就分为以下四个方面
- 从内存到寄存器
- 从寄存器到内存
- 从立即数到寄存器,
- 从立即数到内存
注意:数据不能从内存直接传递到内存。如果需要从内存传递到内存,要以寄存器为中介。(这些知识,还是我当年大学学的计算机组成原理里面的)
- Intel的汇编会在数据前面说明数据大小,比如
mov DWORD PTR [rbp-4], 4,意思是将一个4字节的4存储到 栈上(地址为rbp-4)。 - 而AT & T是通过指令的后缀来说明,同样的指令为
movl $4, -4(%rbp)。而存储的地方,AT & T汇编是通过前缀来区别,比如%q前缀表示寄存器,$表示立即数,()表示内存。