文章目录
- opencv图像卷积操作原理,opencv中常用的图像滤波函数
- 一、图像卷积操作原理:
- 1、卷积操作原理图:
- 二、opencv常用的图像滤波函数:这些函数的主要作用是对图像进行平滑处理或去除噪声(核心目的是减少图像中的噪声,使图像变得更加平滑);
- 1、cv::blur()函数:英文全拼blur
- (1)函数原型:
- (2)代码示例:
- 2、cv::boxFilter()函数:
- (1)函数原型:
- (2)cv.blur() 均值滤波器与cv.boxFilter() 方框滤波器的区别:
- 核的定义:
- 参数不同:
- 功能略有差异:
- 总结:
- (3)代码示例:
- 3、cv::GuassianBlur()函数:
- (1)函数原型:
- (2)代码示例:
- 4、cv::medianBlur()函数:
- (1)函数原型:
- (2)代码示例:
- 5、cv::bilateralFilter()函数:
- (1)函数原型:
- (2)代码示例:
- 6、cv2::filter2D()函数:
- (1)函数原型:
- (2)代码示例:
opencv图像卷积操作原理,opencv中常用的图像滤波函数
一、图像卷积操作原理:
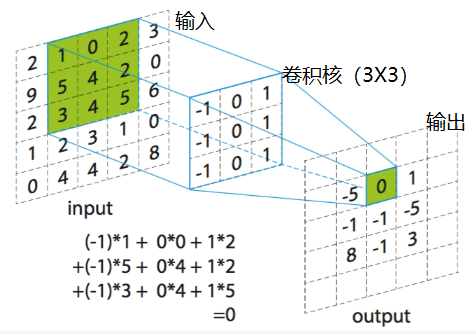
卷积是图像处理中常用的操作之一,它通过在图像上滑动一个滤波器(也称为卷积核)来实现对图像的处理,每个滤波器(卷积核)都是一个小的矩阵,它包含一组权重值;
1、卷积操作原理图:
- 将滤波器(卷积核)与图像的一个小区域相乘;
- 将得到的乘积相加,得到一个新的像素值;
- 通过不断滑动滤波器(卷积核),对整幅图像进行处理,从而得到一幅经过卷积操作的图像;
计算过程图:
二、opencv常用的图像滤波函数:这些函数的主要作用是对图像进行平滑处理或去除噪声(核心目的是减少图像中的噪声,使图像变得更加平滑);
1、cv::blur()函数:英文全拼blur
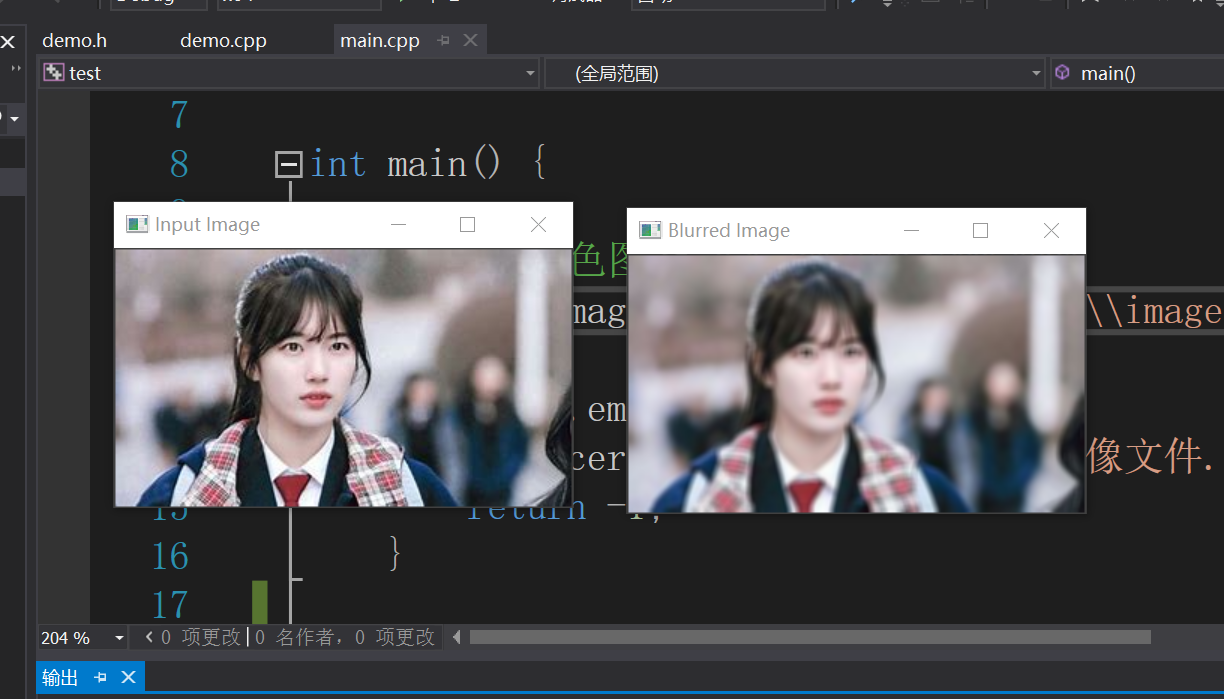
均值滤波器(平均滤波器),用于图像模糊(平滑)处理的函数,它将图像中的每个像素值替换为其周围像素值的平均值,从而实现图像的模糊效果;
(1)函数原型:
void cv::blur(InputArray src, OutputArray dst, Size ksize, Point anchor = Point(-1,-1), int borderType = BORDER_DEFAULT
);参数解释:
src:输入图像,可以是单通道或多通道图像(如灰度图或彩色图);
dst:输出图像;
ksize:卷积核,用cv::Size(width, height)来指定,例如(3,3)表示一个3x3的卷积核,通常使用奇数大小的核;
anchor:锚点,默认为卷积核的中心,默认值Point(-1, -1);
borderType:图像边缘处的像素填充方式(cv::BORDER_CONSTANT:在图像边缘处的像素,用常数填充,这个常数由cv::Scalar()函数指定,默认为黑色;cv::BORDER_REPLICATE:在图像边缘处的像素,用最边界的像素值来填充;cv::BORDER_DEFAULT:根据具体情况选择最合适的边界处理方式,默认值;
)
(2)代码示例:
#include <opencv2\opencv.hpp>
#include <iostream>
#include <demo.h>using namespace cv;
using namespace std;int main() {// 读取彩色图像cv::Mat image = cv::imread("C:\\cpp\\image\\suzy1.jpg");if (image.empty()) {std::cerr << "Error: 无法读取图像文件." << std::endl;return -1;}cv::Mat outputImage;cv::Size kernelSize(5, 5);cv::blur(image, outputImage, kernelSize);cv::imshow("Input Image", image);cv::imshow("Blurred Image", outputImage);cv::waitKey(0);return 0;}运行结果:
2、cv::boxFilter()函数:
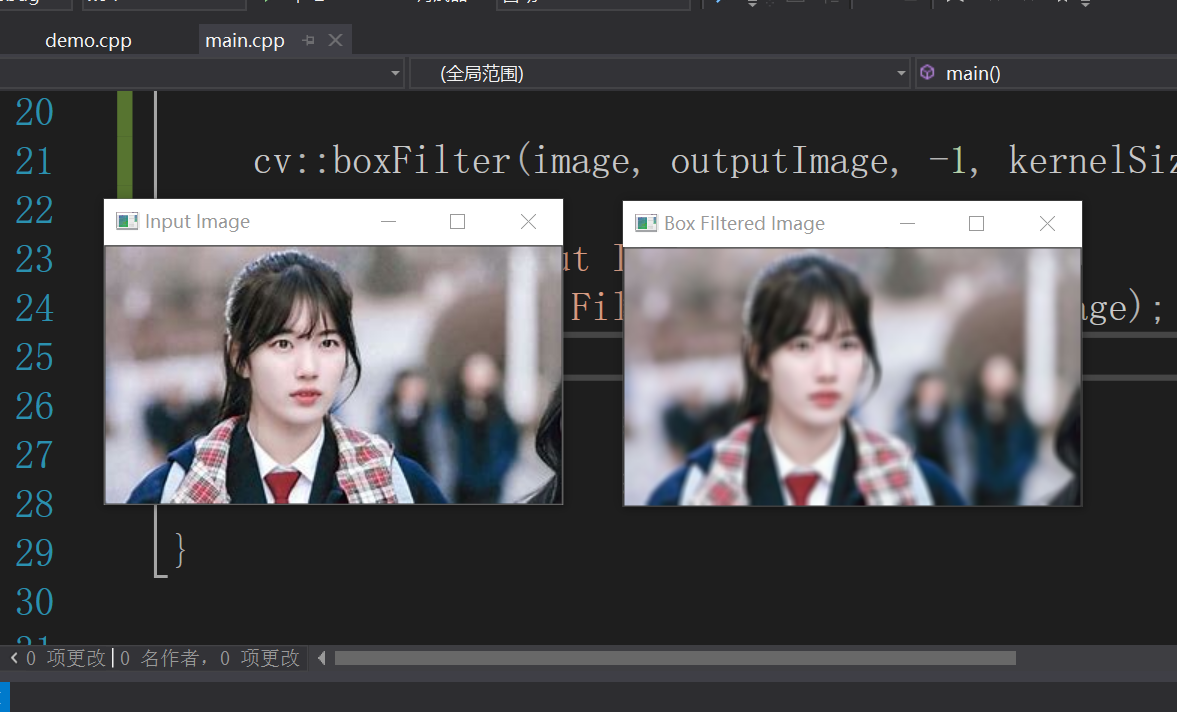
方框滤波器(均值滤波器的一种变体),方框滤波器与均值滤波器类似,通过计算图像中每个像素周围邻域像素的加权平均值来减少噪声,但相比
cv::blur(),cv::boxFilter()可以指定不同的归一化方式;
(1)函数原型:
void cv::boxFilter(cv::InputArray src,cv::OutputArray dst,int ddepth,cv::Size ksize,cv::Point anchor = cv::Point(-1,-1),bool normalize = true,int borderType = cv::BORDER_DEFAULT
);参数解释:
src:输入图像,可以是单通道或多通道图像(如灰度图或彩色图);
dst:输出图像,与输入图像具有相同的尺寸和通道数;
ddepth:输出图像的深度,通常使用-1表示与输入相同;
ksize:卷积核,用cv::Size(width, height)来指定,例如(3,3)表示一个3x3的卷积核,通常使用奇数大小的核;
anchor:锚点,默认为卷积核的中心,默认值Point(-1, -1);
normalize:是否对结果进行归一化,默认为true;
borderType:图像边缘处的像素填充方式(cv::BORDER_CONSTANT:在图像边缘处的像素,用常数填充,这个常数由cv::Scalar()函数指定,默认为黑色;cv::BORDER_REPLICATE:在图像边缘处的像素,用最边界的像素值来填充;cv::BORDER_DEFAULT:根据具体情况选择最合适的边界处理方式,默认值;
)
(2)cv.blur() 均值滤波器与cv.boxFilter() 方框滤波器的区别:
cv::blur()和cv::boxFilter()都是用于图像平滑处理的滤波器,它们的核心目的是减少图像中的噪声,使图像变得更加平滑;
核的定义:
- cv::blur() 的核是一个归一化的平均核,也就是说核内所有元素的和为1(这表示在滤波过程中,像素值被取平均值);
- cv::boxFilter() 的核不一定是归一化的,可以通过 normalize 参数控制是否归一化(这使得方框滤波器可以对像素进行加权平均);
参数不同:
- cv::blur() 接受一个 cv::Size 参数作为核的大小,通常使用奇数大小的核;
- cv::boxFilter() 接受一个整数参数作为核的大小,可以使用偶数大小的核;
功能略有差异:
- 由于 cv::boxFilter() 可以选择是否归一化,因此它可以用于一些特殊情况下的平滑处理,比如图像锐化;
- cv::blur() 更适合通用的平滑处理;
总结:
总的来说,这两个函数都可以用于图像平滑处理,选择使用哪个取决于你的具体需求以及想要实现的效果,如果你只是需要一个简单的平滑处理,通常使用 cv::blur() 就足够了,如果你需要更多的控制,或者想要尝试一些特殊的滤波效果,可以考虑使用 cv::boxFilter();
(3)代码示例:
#include <opencv2\opencv.hpp>
#include <iostream>
#include <demo.h>using namespace cv;
using namespace std;int main() {// 读取彩色图像cv::Mat image = cv::imread("C:\\cpp\\image\\suzy1.jpg");if (image.empty()) {std::cerr << "Error: 无法读取图像文件." << std::endl;return -1;}cv::Mat outputImage;cv::Size kernelSize(5, 5);cv::boxFilter(image, outputImage, -1, kernelSize);cv::imshow("Input Image", image);cv::imshow("Box Filtered Image", outputImage);cv::waitKey(0);return 0;}
运行结果:
3、cv::GuassianBlur()函数:
高斯滤波器,对输入图像中的每个像素施加一个高斯函数作为权重,从而实现平滑处理,通过应用高斯滤波器来减少图像中的噪声,会较明显地模糊边缘;
(1)函数原型:
void cv::GaussianBlur(cv::InputArray src, cv::OutputArray dst, cv::Size ksize, double sigmaX, double sigmaY = 0, int borderType = cv::BORDER_DEFAULT
);参数解释:
src:输入图像,可以是单通道或多通道图像(如灰度图或彩色图);
dst:输出图像,与输入图像具有相同的尺寸和通道数;
ksize:卷积核,用cv::Size(width, height)来指定,例如(3,3)表示一个3x3的卷积核,通常使用奇数大小的核;
sigmaX:X方向的高斯核标准差;
sigmaY:Y方向的高斯核标准差,如果为零则默认与sigmaX相同;
borderType:图像边缘处的像素填充方式(cv::BORDER_CONSTANT:在图像边缘处的像素,用常数填充,这个常数由cv::Scalar()函数指定,默认为黑色;cv::BORDER_REPLICATE:在图像边缘处的像素,用最边界的像素值来填充;cv::BORDER_DEFAULT:根据具体情况选择最合适的边界处理方式,默认值;
)
(2)代码示例:
#include <opencv2\opencv.hpp>
#include <iostream>
#include <demo.h>using namespace cv;
using namespace std;int main() {// 读取彩色图像cv::Mat inputImage = cv::imread("C:\\cpp\\image\\suzy1.jpg");if (inputImage.empty()) {std::cerr << "Error: 无法读取图像文件." << std::endl;return -1;}cv::Mat outputImage;cv::Size kernelSize(5, 5);double sigmaX = 1.5;cv::GaussianBlur(inputImage, outputImage, kernelSize, sigmaX);cv::imshow("Input Image", inputImage);cv::imshow("Gaussian Blurred Image", outputImage);cv::waitKey(0);return 0;}运行结果:

4、cv::medianBlur()函数:
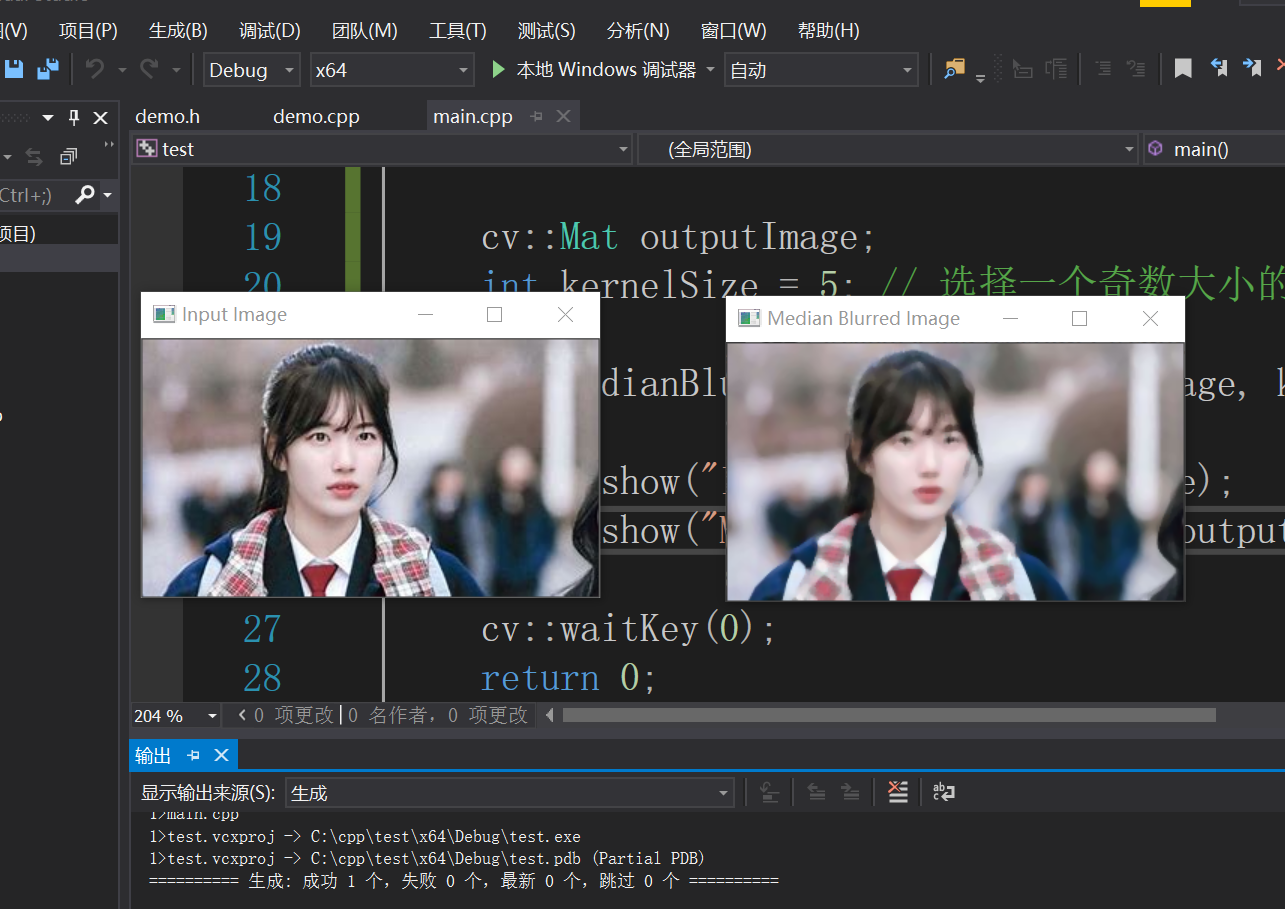
中值滤波器,对输入图像进行平滑处理,通过用邻域像素的中值来替代当前像素的值,从而减少图像中的噪声,是一种常用于去除图像中的椒盐噪声(salt-and-pepper noise)的非线性滤波器;
(1)函数原型:
void cv::medianBlur(cv::InputArray src, cv::OutputArray dst, int ksize
);参数解释:
src:输入图像,可以是单通道或多通道图像(如灰度图或彩色图);
dst:输出图像,与输入图像具有相同的尺寸和通道数;
ksize:卷积核,通常为奇数,用cv::Size(width, height)来指定,通常使用奇数大小的核;(2)代码示例:
#include <opencv2\opencv.hpp>
#include <iostream>
#include <demo.h>using namespace cv;
using namespace std;int main() {// 读取彩色图像cv::Mat inputImage = cv::imread("C:\\cpp\\image\\suzy1.jpg");if (inputImage.empty()) {std::cerr << "Error: 无法读取图像文件." << std::endl;return -1;}cv::Mat outputImage;int kernelSize = 5; // 选择一个奇数大小的核cv::medianBlur(inputImage, outputImage, kernelSize);cv::imshow("Input Image", inputImage);cv::imshow("Median Blurred Image", outputImage);cv::waitKey(0);return 0;}运行结果:
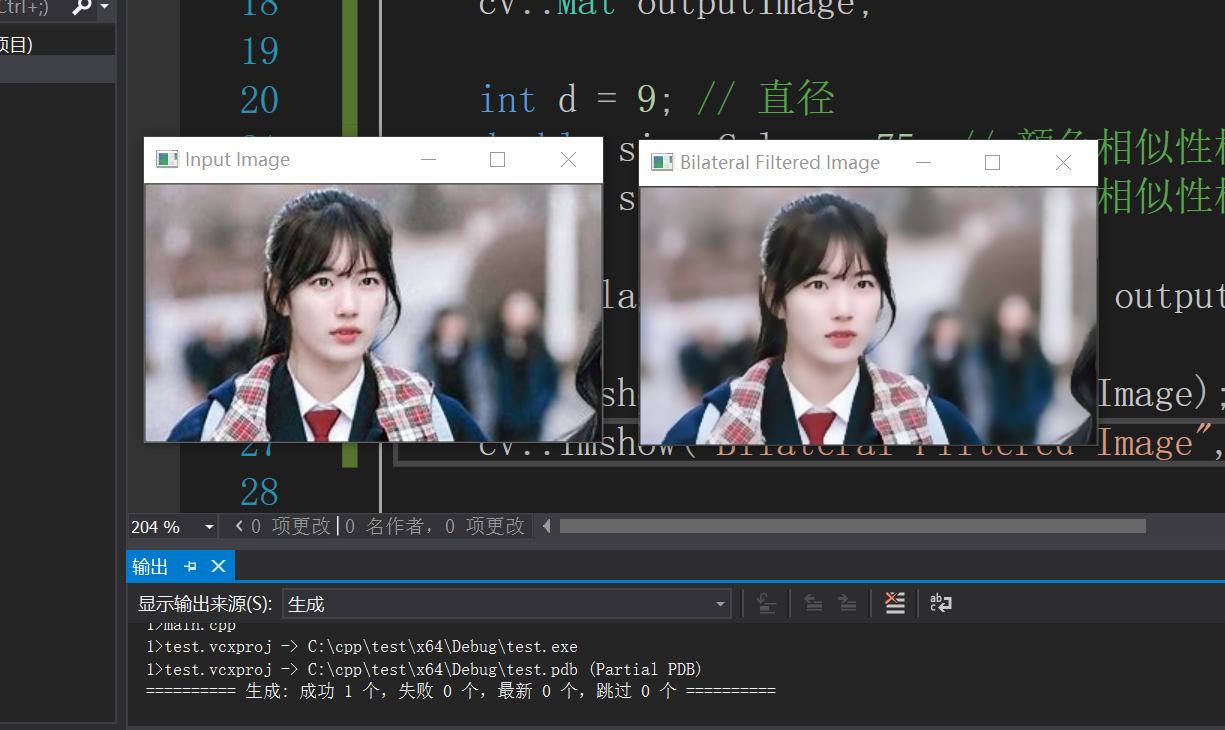
5、cv::bilateralFilter()函数:
双边滤波器,双边滤波器顾名思义比高斯滤波多了一个高斯方差sigma-d,所以在边缘附近,离的较远的像素不会太多影响到边缘上的像素值,这样就保证了边缘附近像素值的保存;
(1)函数原型:
void cv::bilateralFilter(cv::InputArray src, cv::OutputArray dst, int d, double sigmaColor, double sigmaSpace, int borderType = cv::BORDER_DEFAULT
);参数解释:src:输入图像,可以是单通道或多通道图像(如灰度图或彩色图);
dst:输出图像,与输入图像具有相同的尺寸和通道数;
d:控制在颜色空间中滤波器的直径,通常在3-5之间;
sigmaColor:控制颜色相似性的标准差,值越大,颜色差异越大;
sigmaSpace:控制空间相似性的标准差,值越大,范围内像素权重越大;
borderType:图像边缘处的像素填充方式(cv::BORDER_CONSTANT:在图像边缘处的像素,用常数填充,这个常数由cv::Scalar()函数指定,默认为黑色;cv::BORDER_REPLICATE:在图像边缘处的像素,用最边界的像素值来填充;cv::BORDER_DEFAULT:根据具体情况选择最合适的边界处理方式,默认值;
)
(2)代码示例:
#include <opencv2\opencv.hpp>
#include <iostream>
#include <demo.h>using namespace cv;
using namespace std;int main() {// 读取彩色图像cv::Mat inputImage = cv::imread("C:\\cpp\\image\\suzy1.jpg");if (inputImage.empty()) {std::cerr << "Error: 无法读取图像文件." << std::endl;return -1;}cv::Mat outputImage;int d = 9; // 直径double sigmaColor = 75; // 颜色相似性标准差double sigmaSpace = 75; // 空间相似性标准差cv::bilateralFilter(inputImage, outputImage, d, sigmaColor, sigmaSpace);cv::imshow("Input Image", inputImage);cv::imshow("Bilateral Filtered Image", outputImage);cv::waitKey(0);return 0;}运行结果:
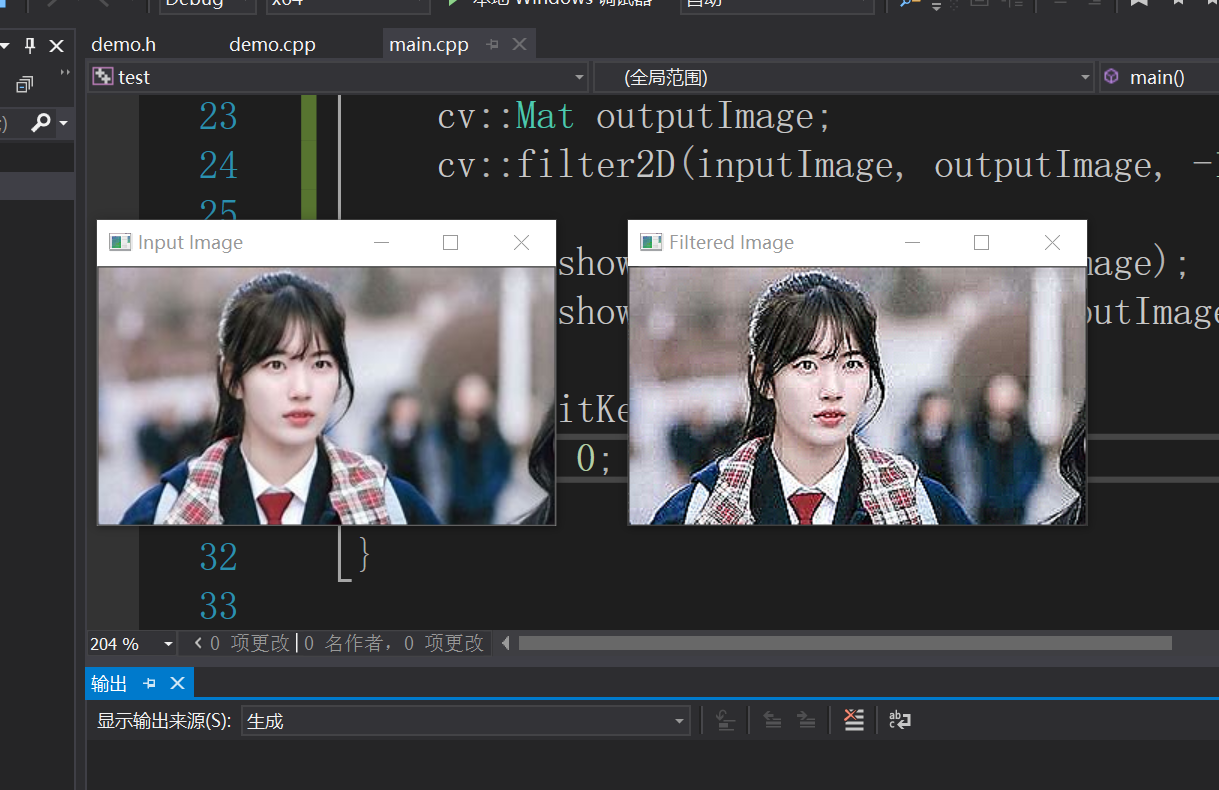
6、cv2::filter2D()函数:
对输入图像进行二维卷积操作,通过将一个核应用于图像的每个像素,从而实现特定的图像处理效果,如边缘检测、模糊等;
(1)函数原型:
void cv::filter2D(cv::InputArray src, cv::OutputArray dst, int ddepth, cv::InputArray kernel, cv::Point anchor = cv::Point(-1,-1),double delta = 0, int borderType = cv::BORDER_DEFAULT
);参数解释:
src:输入图像,可以是单通道或多通道图像(如灰度图或彩色图);
dst:输出图像,与输入图像具有相同的尺寸和通道数;
ddepth:输出图像的深度,通常使用-1表示与输入相同;
kernel:卷积核,用于定义卷积操作的权重矩阵;
anchor:锚点,默认为卷积核的中心,默认值Point(-1, -1);
delta:可选参数,用于调节卷积结果的偏移值,默认为0;
borderType:图像边缘处的像素填充方式(cv::BORDER_CONSTANT:在图像边缘处的像素,用常数填充,这个常数由cv::Scalar()函数指定,默认为黑色;cv::BORDER_REPLICATE:在图像边缘处的像素,用最边界的像素值来填充;cv::BORDER_DEFAULT:根据具体情况选择最合适的边界处理方式,默认值;
)(2)代码示例:
#include <opencv2\opencv.hpp>
#include <iostream>
#include <demo.h>using namespace cv;
using namespace std;int main() {// 读取彩色图像cv::Mat inputImage = cv::imread("C:\\cpp\\image\\suzy1.jpg");if (inputImage.empty()) {std::cerr << "Error: 无法读取图像文件." << std::endl;return -1;}cv::Mat kernel = (cv::Mat_<float>(3, 3) <<0, -1, 0,-1, 5, -1,0, -1, 0);cv::Mat outputImage;cv::filter2D(inputImage, outputImage, -1, kernel);cv::imshow("Input Image", inputImage);cv::imshow("Filtered Image", outputImage);cv::waitKey(0);return 0;}运行结果:




![[电源选项]没有系统散热方式,没有被动散热选项](https://img-blog.csdnimg.cn/dcd5e6e7c5b24b12a496aa18247ae64f.png)