360VOT: A New Benchmark Dataset for Omnidirectional Visual Object Tracking
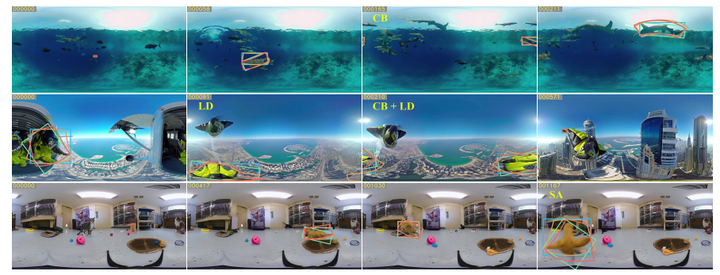
360VOT 是一个新的大规模全景追踪基准数据集,旨在为全景视觉物体追踪提供支持。这个数据集包含了 120 个序列,总计超过 11.3 万张高分辨率帧,采用等距投影。追踪的目标涵盖了 32 个不同的类别,场景多样。
此外,还提供了 4 种无偏差的ground truth,包括(旋转)边界框和(旋转)边界视场,以及为 360° 图像量身定制的新指标,从而可以准确评估全景跟踪性能。
- 论文链接:https://arxiv.org/abs/2307.14630
- 项目链接(开源):https://360vot.hkustvgd.com/