- 开发板:stm32mp157aaa(Cortex-A7*2 + Cortex-M4*1)
- 开发环境:vscode、串口工具
1 引入ioctl函数的意义
linux操作系统中有意将数据的读写和读写功能的选择分别交给不同的函数去完成。就让read/write函数只进行数据的读写即可,让一些其他功能的设置和选择交给ioctl函数来实现。比如,串口通信时,需要设置波特率,需要设置数据格式,也需要最终选择数据收发,让这些都由ioctl函数来完成。让read()write()只进行串口数据收发即可。
2 ioctl函数分析
*********系统调用函数的分析**********
#include <sys/ioctl.h>
int ioctl(int fd, unsigned long request, ...);
功能:进行io功能的设置
参数:
fd:文件描述符
request:io控制的功能码
...:可以加,也可以不加。如果第三个参数传递数值,只能传递整型数据和指针
返回值:成功返回0,失败返回错误码*********驱动中操作方法的分析********
long (*unlocked_ioctl) (struct file *file, unsigned int cmd, unsigned long arg)
{参数分析:file:文件指针cmd:应用程序中的ioctl第二个参数传递过来arg:应用程序中的ioctl第三个参数传递过来
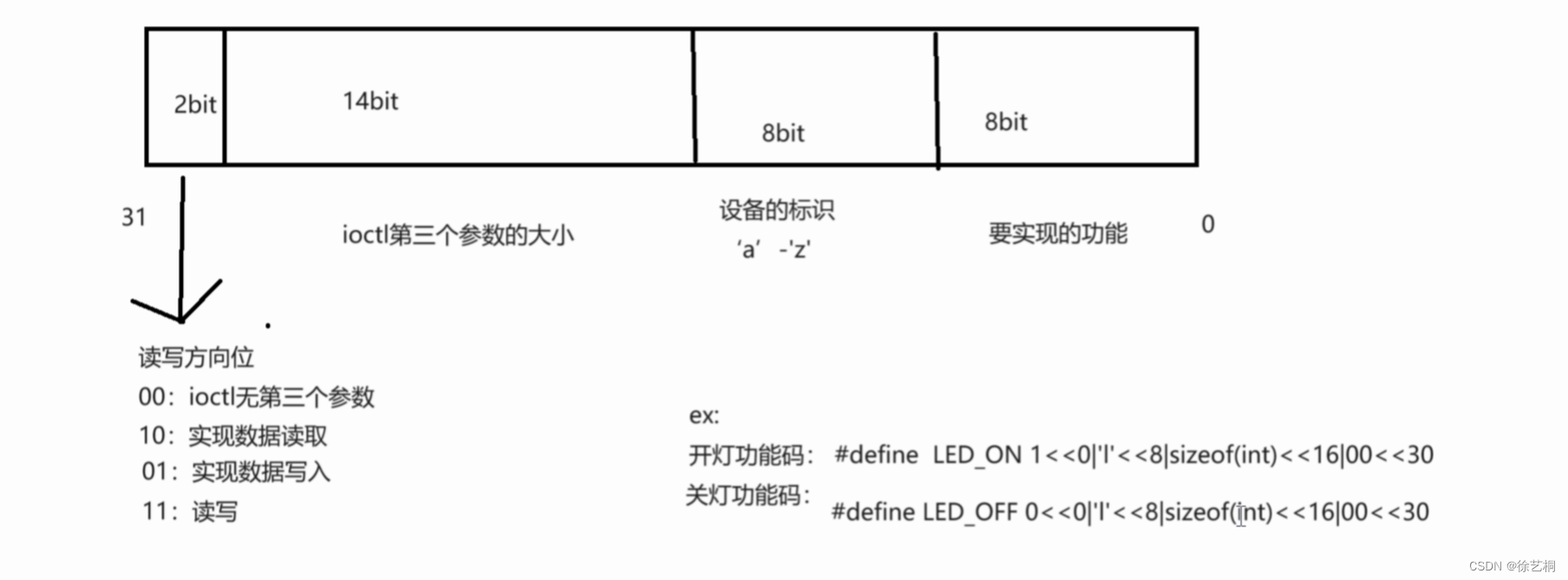
}3 ioctl功能码的构建
为了让实现不同功能的功能码尽量不一样,我们对功能码进行了编码
查询内核的说明手册:~/linux-5.10.61/Documentation/userspace-api/ioctlvi ioctl-decoding.rst //功能码的编码说明文档 ====== ==================================bits meaning====== ==================================31-30 00 - no parameters: uses _IO macro10 - read: _IOR01 - write: _IOW11 - read/write: _IOWR29-16 size of arguments15-8 ascii character supposedlyunique to each driver7-0 function #====== ==================================
#define _IO(type,nr) _IOC(_IOC_NONE,(type),(nr),0)
#define _IOR(type,nr,size) _IOC(_IOC_READ,(type),(nr),sizeof(size))
#define _IOW(type,nr,size) _IOC(_IOC_WRITE,(type),(nr),sizeof(size))
#define _IOWR(type,nr,size) _IOC(_IOC_READ|_IOC_WRITE,(type),(nr),sizeof(size)#define _IOC(dir,type,nr,size) \((unsigned int) \(((dir) << _IOC_DIRSHIFT) | \((type) << _IOC_TYPESHIFT) | \((nr) << _IOC_NRSHIFT) | \((size) << _IOC_SIZESHIFT)))ex:构建LED开关的功能码:ioctl函数无第三个参数
开灯 #define LED_ON _IO('l',1)
关灯 #define LED_OFF _IO('l',0)ex:构建LED开关的功能码:ioctl函数有第三个参数
开灯 #define LED_ON _IOW('l',1,int)
关灯 #define LED_OFF _IOW('l',0,int)4 ioctl实例①——不传递第三个参数
应用程序
#include<stdlib.h>
#include<stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <sys/ioctl.h>
#include <fcntl.h>
#include<unistd.h>
#include<string.h>
#include "head.h"int main(int argc, char const *argv[])
{char buf[128]={0};int a;int fd=open("/dev/myled0",O_RDWR);if(fd<0){printf("打开设备文件失败\n");exit(-1);}while(1){//从终端读取printf("请输入要实现的功能 ");printf("0(关灯) 1(开灯)\n");printf("请输入>");scanf("%d",&a);switch(a){case 1:ioctl(fd,LED_ON);break;case 0:ioctl(fd,LED_OFF);break;}}close(fd);return 0;
}
头文件
#ifndef __HEAD_H__
#define __HEAD_H__
typedef struct
{unsigned int MODER;unsigned int OTYPER;unsigned int OSPEEDR;unsigned int PUPDR;unsigned int IDR;unsigned int ODR;
} gpio_t;
#define PHY_LED1_ADDR 0X50006000
#define PHY_LED2_ADDR 0X50007000
#define PHY_LED3_ADDR 0X50006000
#define PHY_RCC_ADDR 0X50000A28
// 构建开灯关灯的功能码
#define LED_ON _IO('l', 1)
#define LED_OFF _IO('l', 0)
#endif
驱动程序
#include <linux/init.h>
#include <linux/module.h>
#include<linux/fs.h>
#include<linux/io.h>
#include<linux/device.h>
#include"head.h"int major;
char kbuf[128]={0};
gpio_t *vir_led1;
gpio_t *vir_led2;
gpio_t *vir_led3;
unsigned int *vir_rcc;
struct class *cls;
struct device *dev;
int mycdev_open(struct inode *inode, struct file *file)
{printk("%s:%s:%d\n",__FILE__,__func__,__LINE__);return 0;
}
long mycdev_ioctl(struct file *file, unsigned int cmd, unsigned long arg)
{switch(cmd){case LED_ON://开灯vir_led1->ODR |= (0X1<<10);vir_led2->ODR |= (0X1<<10);vir_led3->ODR |= (0X1<<8);break;case LED_OFF://关灯vir_led1->ODR &= (~(0X1<<10));vir_led2->ODR &= (~(0X1<<10));vir_led3->ODR &= (~(0X1<<8));break;}return 0;
}
int mycdev_close(struct inode *inode, struct file *file)
{printk("%s:%s:%d\n",__FILE__,__func__,__LINE__);return 0;
}//定义操作方法结构体变量并赋值
struct file_operations fops={.open=mycdev_open,.unlocked_ioctl=mycdev_ioctl,.release=mycdev_close,
};int all_led_init(void)
{//寄存器地址的映射vir_led1=ioremap(PHY_LED1_ADDR,sizeof(gpio_t));if(vir_led1==NULL){printk("ioremap filed:%d\n",__LINE__);return -ENOMEM;}vir_led2=ioremap(PHY_LED2_ADDR,sizeof(gpio_t));if(vir_led2==NULL){printk("ioremap filed:%d\n",__LINE__);return -ENOMEM;}vir_led3=vir_led1;vir_rcc=ioremap(PHY_RCC_ADDR,4);if(vir_rcc==NULL){printk("ioremap filed:%d\n",__LINE__);return -ENOMEM;}printk("物理地址映射成功\n");//寄存器的初始化//rcc(*vir_rcc) |= (3<<4);//led1vir_led1->MODER &= (~(3<<20));vir_led1->MODER |= (1<<20);vir_led1->ODR &= (~(1<<10));//led2vir_led2->MODER &= (~(3<<20));vir_led2->MODER |= (1<<20);vir_led2->ODR &= (~(1<<10));//led3vir_led3->MODER &= (~(3<<16));vir_led1->MODER |= (1<<16);vir_led1->ODR &= (~(1<<8));printk("寄存器初始化成功\n");return 0;
}static int __init mycdev_init(void)
{//字符设备驱动注册major=register_chrdev(0,"mychrdev",&fops);if(major<0){printk("字符设备驱动注册失败\n");return major;}printk("字符设备驱动注册成功:major=%d\n",major);//向上提交目录cls=class_create(THIS_MODULE,"mychrdev");if(IS_ERR(cls)){printk("向上提交目录失败\n");return -PTR_ERR(cls);}printk("向上提交目录成功\n");//向上提交设备节点信息int i;//向上提交三次设备节点信息for(i=0;i<3;i++){dev=device_create(cls,NULL,MKDEV(major,i),NULL,"myled%d",i);if(IS_ERR(dev)){printk("向上提交设备节点失败\n");return -PTR_ERR(dev);}}printk("向上提交设备节点成功\n");//寄存器映射以及初始化all_led_init();return 0;
}
static void __exit mycdev_exit(void)
{//取消地址映射iounmap(vir_led1);iounmap(vir_led2);iounmap(vir_rcc);//销毁设备节点信息int i;for(i=0;i<3;i++){device_destroy(cls,MKDEV(major,i));}//销毁目录class_destroy(cls);//注销字符设备驱动unregister_chrdev(major,"mychrdev");}
module_init(mycdev_init);
module_exit(mycdev_exit);
MODULE_LICENSE("GPL");5 ioctl实例②——第三个参数为整型
应用程序
#include<stdlib.h>
#include<stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <sys/ioctl.h>
#include <fcntl.h>
#include<unistd.h>
#include<string.h>
#include "head.h"int main(int argc, char const *argv[])
{char buf[128]={0};int a,b;int fd=open("/dev/myled0",O_RDWR);if(fd<0){printf("打开设备文件失败\n");exit(-1);}while(1){//从终端读取printf("请输入要实现的功能 ");printf("0(关灯) 1(开灯)\n");printf("请输入>");scanf("%d",&a);printf("请选择要控制的灯:1(LED1)2(LED2) 3(LED3)\n");printf("请输入>");scanf("%d",&b);switch(a){case 1:ioctl(fd,LED_ON,b);break;case 0:ioctl(fd,LED_OFF,b);break;}}close(fd);return 0;
}
头文件
#ifndef __HEAD_H__
#define __HEAD_H__
typedef struct
{unsigned int MODER;unsigned int OTYPER;unsigned int OSPEEDR;unsigned int PUPDR;unsigned int IDR;unsigned int ODR;
} gpio_t;
#define PHY_LED1_ADDR 0X50006000
#define PHY_LED2_ADDR 0X50007000
#define PHY_LED3_ADDR 0X50006000
#define PHY_RCC_ADDR 0X50000A28
// 构建开灯关灯的功能码
#define LED_ON _IOW('l', 1,int)
#define LED_OFF _IOW('l', 0,int)
#endif
驱动程序
#include <linux/init.h>
#include <linux/module.h>
#include <linux/fs.h>
#include <linux/io.h>
#include <linux/device.h>
#include "head.h"int major;
char kbuf[128] = {0};
gpio_t *vir_led1;
gpio_t *vir_led2;
gpio_t *vir_led3;
unsigned int *vir_rcc;
struct class *cls;
struct device *dev;
int mycdev_open(struct inode *inode, struct file *file)
{printk("%s:%s:%d\n", __FILE__, __func__, __LINE__);return 0;
}
long mycdev_ioctl(struct file *file, unsigned int cmd, unsigned long arg)
{switch (cmd){case LED_ON: // 开灯switch (arg){case 1: // LED1vir_led1->ODR |= (0X1 << 10);break;case 2:vir_led2->ODR |= (0X1 << 10);break;case 3:vir_led3->ODR |= (0X1 << 8);break;}break;case LED_OFF: // 关灯switch (arg){case 1: // LED1vir_led1->ODR &= (~(0X1 << 10));break;case 2:vir_led2->ODR &= (~(0X1 << 10));break;case 3:vir_led3->ODR &= (~(0X1 << 8));break;} break;}return 0;
}
int mycdev_close(struct inode *inode, struct file *file)
{printk("%s:%s:%d\n", __FILE__, __func__, __LINE__);return 0;
}// 定义操作方法结构体变量并赋值
struct file_operations fops = {.open = mycdev_open,.unlocked_ioctl = mycdev_ioctl,.release = mycdev_close,
};int all_led_init(void)
{// 寄存器地址的映射vir_led1 = ioremap(PHY_LED1_ADDR, sizeof(gpio_t));if (vir_led1 == NULL){printk("ioremap filed:%d\n", __LINE__);return -ENOMEM;}vir_led2 = ioremap(PHY_LED2_ADDR, sizeof(gpio_t));if (vir_led2 == NULL){printk("ioremap filed:%d\n", __LINE__);return -ENOMEM;}vir_led3 = vir_led1;vir_rcc = ioremap(PHY_RCC_ADDR, 4);if (vir_rcc == NULL){printk("ioremap filed:%d\n", __LINE__);return -ENOMEM;}printk("物理地址映射成功\n");// 寄存器的初始化// rcc(*vir_rcc) |= (3 << 4);// led1vir_led1->MODER &= (~(3 << 20));vir_led1->MODER |= (1 << 20);vir_led1->ODR &= (~(1 << 10));// led2vir_led2->MODER &= (~(3 << 20));vir_led2->MODER |= (1 << 20);vir_led2->ODR &= (~(1 << 10));// led3vir_led3->MODER &= (~(3 << 16));vir_led1->MODER |= (1 << 16);vir_led1->ODR &= (~(1 << 8));printk("寄存器初始化成功\n");return 0;
}static int __init mycdev_init(void)
{// 字符设备驱动注册major = register_chrdev(0, "mychrdev", &fops);if (major < 0){printk("字符设备驱动注册失败\n");return major;}printk("字符设备驱动注册成功:major=%d\n", major);// 向上提交目录cls = class_create(THIS_MODULE, "mychrdev");if (IS_ERR(cls)){printk("向上提交目录失败\n");return -PTR_ERR(cls);}printk("向上提交目录成功\n");// 向上提交设备节点信息int i; // 向上提交三次设备节点信息for (i = 0; i < 3; i++){dev = device_create(cls, NULL, MKDEV(major, i), NULL, "myled%d", i);if (IS_ERR(dev)){printk("向上提交设备节点失败\n");return -PTR_ERR(dev);}}printk("向上提交设备节点成功\n");// 寄存器映射以及初始化all_led_init();return 0;
}
static void __exit mycdev_exit(void)
{// 取消地址映射iounmap(vir_led1);iounmap(vir_led2);iounmap(vir_rcc);// 销毁设备节点信息int i;for (i = 0; i < 3; i++){device_destroy(cls, MKDEV(major, i));}// 销毁目录class_destroy(cls);// 注销字符设备驱动unregister_chrdev(major, "mychrdev");
}
module_init(mycdev_init);
module_exit(mycdev_exit);
MODULE_LICENSE("GPL");6 ioctl实例③——第三个参数为地址
应用程序
#include<stdlib.h>
#include<stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <sys/ioctl.h>
#include <fcntl.h>
#include<unistd.h>
#include<string.h>
#include "head.h"int main(int argc, char const *argv[])
{char buf[128]={0};int a,b;int fd=open("/dev/myled0",O_RDWR);if(fd<0){printf("打开设备文件失败\n");exit(-1);}while(1){//从终端读取printf("请输入要实现的功能 ");printf("0(关灯) 1(开灯)\n");printf("请输入>");scanf("%d",&a);printf("请选择要控制的灯:1(LED1)2(LED2) 3(LED3)\n");printf("请输入>");scanf("%d",&b);switch(a){case 1:ioctl(fd,LED_ON,&b);break;case 0:ioctl(fd,LED_OFF,&b);break;}}close(fd);return 0;
}
头文件
#ifndef __HEAD_H__
#define __HEAD_H__
typedef struct
{unsigned int MODER;unsigned int OTYPER;unsigned int OSPEEDR;unsigned int PUPDR;unsigned int IDR;unsigned int ODR;
} gpio_t;
#define PHY_LED1_ADDR 0X50006000
#define PHY_LED2_ADDR 0X50007000
#define PHY_LED3_ADDR 0X50006000
#define PHY_RCC_ADDR 0X50000A28
// 构建开灯关灯的功能码
#define LED_ON _IOW('l', 1,int)
#define LED_OFF _IOW('l', 0,int)
#endif
驱动程序
#include <linux/init.h>
#include <linux/module.h>
#include <linux/fs.h>
#include <linux/io.h>
#include <linux/device.h>
#include "head.h"int major;
char kbuf[128] = {0};
gpio_t *vir_led1;
gpio_t *vir_led2;
gpio_t *vir_led3;
unsigned int *vir_rcc;
struct class *cls;
struct device *dev;
int mycdev_open(struct inode *inode, struct file *file)
{printk("%s:%s:%d\n", __FILE__, __func__, __LINE__);return 0;
}
long mycdev_ioctl(struct file *file, unsigned int cmd, unsigned long arg)
{int which;//获取应用程序中b的值int ret= copy_from_user(&which,(void *)arg,4);if(ret){printk("copy_from_user filed\n");return-EIO;}switch (cmd){case LED_ON: // 开灯switch (which){case 1: // LED1vir_led1->ODR |= (0X1 << 10);break;case 2:vir_led2->ODR |= (0X1 << 10);break;case 3:vir_led3->ODR |= (0X1 << 8);break;}break;case LED_OFF: // 关灯switch (which){case 1: // LED1vir_led1->ODR &= (~(0X1 << 10));break;case 2:vir_led2->ODR &= (~(0X1 << 10));break;case 3:vir_led3->ODR &= (~(0X1 << 8));break;} break;}return 0;
}
int mycdev_close(struct inode *inode, struct file *file)
{printk("%s:%s:%d\n", __FILE__, __func__, __LINE__);return 0;
}// 定义操作方法结构体变量并赋值
struct file_operations fops = {.open = mycdev_open,.unlocked_ioctl = mycdev_ioctl,.release = mycdev_close,
};int all_led_init(void)
{// 寄存器地址的映射vir_led1 = ioremap(PHY_LED1_ADDR, sizeof(gpio_t));if (vir_led1 == NULL){printk("ioremap filed:%d\n", __LINE__);return -ENOMEM;}vir_led2 = ioremap(PHY_LED2_ADDR, sizeof(gpio_t));if (vir_led2 == NULL){printk("ioremap filed:%d\n", __LINE__);return -ENOMEM;}vir_led3 = vir_led1;vir_rcc = ioremap(PHY_RCC_ADDR, 4);if (vir_rcc == NULL){printk("ioremap filed:%d\n", __LINE__);return -ENOMEM;}printk("物理地址映射成功\n");// 寄存器的初始化// rcc(*vir_rcc) |= (3 << 4);// led1vir_led1->MODER &= (~(3 << 20));vir_led1->MODER |= (1 << 20);vir_led1->ODR &= (~(1 << 10));// led2vir_led2->MODER &= (~(3 << 20));vir_led2->MODER |= (1 << 20);vir_led2->ODR &= (~(1 << 10));// led3vir_led3->MODER &= (~(3 << 16));vir_led1->MODER |= (1 << 16);vir_led1->ODR &= (~(1 << 8));printk("寄存器初始化成功\n");return 0;
}static int __init mycdev_init(void)
{// 字符设备驱动注册major = register_chrdev(0, "mychrdev", &fops);if (major < 0){printk("字符设备驱动注册失败\n");return major;}printk("字符设备驱动注册成功:major=%d\n", major);// 向上提交目录cls = class_create(THIS_MODULE, "mychrdev");if (IS_ERR(cls)){printk("向上提交目录失败\n");return -PTR_ERR(cls);}printk("向上提交目录成功\n");// 向上提交设备节点信息int i; // 向上提交三次设备节点信息for (i = 0; i < 3; i++){dev = device_create(cls, NULL, MKDEV(major, i), NULL, "myled%d", i);if (IS_ERR(dev)){printk("向上提交设备节点失败\n");return -PTR_ERR(dev);}}printk("向上提交设备节点成功\n");// 寄存器映射以及初始化all_led_init();return 0;
}
static void __exit mycdev_exit(void)
{// 取消地址映射iounmap(vir_led1);iounmap(vir_led2);iounmap(vir_rcc);// 销毁设备节点信息int i;for (i = 0; i < 3; i++){device_destroy(cls, MKDEV(major, i));}// 销毁目录class_destroy(cls);// 注销字符设备驱动unregister_chrdev(major, "mychrdev");
}
module_init(mycdev_init);
module_exit(mycdev_exit);
MODULE_LICENSE("GPL");