PBR基于物理的渲染可以实现更加真实的效果,其Shader值得分析一下。但PBR需要较多的基础知识,不适合不会OpenGL的朋友。
一、PBR理论
PBR指基于物理的渲染,其理论较多,需要的基础知识也较多,我在这就不再写一遍了,具体可以参看:
LearnOpenGL PBR理论-英文 或者 LearnOpenGL PBR理论-中文
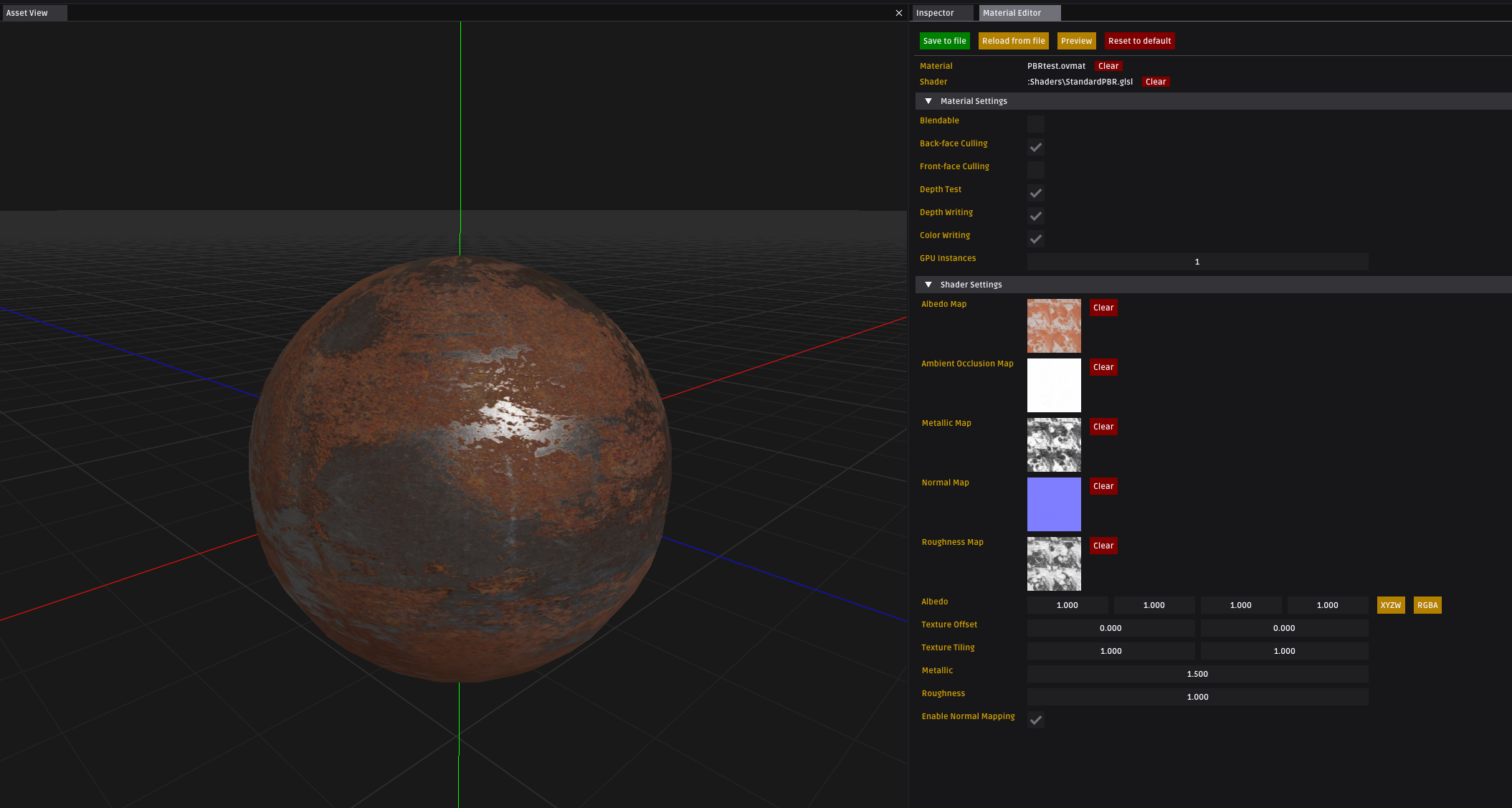
Overload也提供了这种材料,借助贴图可以实现非常真实的材质效果。下面这个例子的贴图来自LearnOpenGL,大家可以自己去下载。
二、PBR Shader分析
顶点着色器
#shader vertex
#version 430 corelayout (location = 0) in vec3 geo_Pos;
layout (location = 1) in vec2 geo_TexCoords;
layout (location = 2) in vec3 geo_Normal;
layout (location = 3) in vec3 geo_Tangent;
layout (location = 4) in vec3 geo_Bitangent;/* Global information sent by the engine */
layout (std140) uniform EngineUBO
{mat4 ubo_Model;mat4 ubo_View;mat4 ubo_Projection;vec3 ubo_ViewPos;float ubo_Time;
};/* Information passed to the fragment shader */
out VS_OUT
{vec3 FragPos;vec3 Normal;vec2 TexCoords;mat3 TBN;flat vec3 TangentViewPos;vec3 TangentFragPos;
} vs_out;void main()
{vs_out.TBN = mat3(normalize(vec3(ubo_Model * vec4(geo_Tangent, 0.0))),normalize(vec3(ubo_Model * vec4(geo_Bitangent, 0.0))),normalize(vec3(ubo_Model * vec4(geo_Normal, 0.0))));mat3 TBNi = transpose(vs_out.TBN);vs_out.FragPos = vec3(ubo_Model * vec4(geo_Pos, 1.0));vs_out.Normal = normalize(mat3(transpose(inverse(ubo_Model))) * geo_Normal);vs_out.TexCoords = geo_TexCoords;vs_out.TangentViewPos = TBNi * ubo_ViewPos;vs_out.TangentFragPos = TBNi * vs_out.FragPos;gl_Position = ubo_Projection * ubo_View * vec4(vs_out.FragPos, 1.0);
}顶点着色器基本与standard材质一致,这里就不再分析了,具体可看standard材质Shader
片元着色器:
#shader fragment
#version 430 core/** 模型视图矩阵、摄像机位置,使用UBO传入 */
/* Global information sent by the engine */
layout (std140) uniform EngineUBO
{mat4 ubo_Model;mat4 ubo_View;mat4 ubo_Projection;vec3 ubo_ViewPos;float ubo_Time;
};/* 顶点着色器的输出 */
/* Information passed from the fragment shader */
in VS_OUT
{vec3 FragPos;vec3 Normal;vec2 TexCoords;mat3 TBN;flat vec3 TangentViewPos;vec3 TangentFragPos;
} fs_in;/* 光源数据用SSBO传入 */
/* Light information sent by the engine */
layout(std430, binding = 0) buffer LightSSBO
{mat4 ssbo_Lights[];
};out vec4 FRAGMENT_COLOR;uniform sampler2D u_AlbedoMap; // 反照率贴图
uniform sampler2D u_MetallicMap; // 金属度贴图
uniform sampler2D u_RoughnessMap; // 粗糙度贴图
uniform sampler2D u_AmbientOcclusionMap; // 环境光遮蔽贴图
uniform sampler2D u_NormalMap; // 法线贴图
uniform vec4 u_Albedo = vec4(1.0); // 反照率系数,控制反照率贴图的权重
uniform vec2 u_TextureTiling = vec2(1.0, 1.0);
uniform vec2 u_TextureOffset = vec2(0.0, 0.0);
uniform bool u_EnableNormalMapping = false; // 是否使用法线贴图
uniform float u_HeightScale = 0.0;
uniform float u_Metallic = 1.0; // 金属度
uniform float u_Roughness = 1.0; // 粗糙度const float PI = 3.14159265359;// 计算法向分布函数D,使用Trowbridge-Reitz GGX
float DistributionGGX(vec3 N, vec3 H, float roughness)
{float a = roughness*roughness;float a2 = a*a;float NdotH = max(dot(N, H), 0.0);float NdotH2 = NdotH*NdotH;float num = a2;float denom = (NdotH2 * (a2 - 1.0) + 1.0);denom = PI * denom * denom;return num / denom;
}float GeometrySchlickGGX(float NdotV, float roughness)
{float r = (roughness + 1.0);float k = (r*r) / 8.0;float num = NdotV;float denom = NdotV * (1.0 - k) + k;return num / denom;
}// Smith’s method
float GeometrySmith(vec3 N, vec3 V, vec3 L, float roughness)
{float NdotV = max(dot(N, V), 0.0);float NdotL = max(dot(N, L), 0.0);float ggx2 = GeometrySchlickGGX(NdotV, roughness);float ggx1 = GeometrySchlickGGX(NdotL, roughness);return ggx1 * ggx2;
}// 菲涅尔项,使用Fresnel-Schlick方程
vec3 fresnelSchlick(float cosTheta, vec3 F0)
{return F0 + (1.0 - F0) * pow(1.0 - cosTheta, 5.0);
}/* 将32位数字变成RGBA颜色 */
vec3 UnPack(float p_Target)
{return vec3(// CPU传入的数据是0-255,转换成0-1.0float((uint(p_Target) >> 24) & 0xff) * 0.003921568627451,float((uint(p_Target) >> 16) & 0xff) * 0.003921568627451,float((uint(p_Target) >> 8) & 0xff) * 0.003921568627451);
}bool PointInAABB(vec3 p_Point, vec3 p_AabbCenter, vec3 p_AabbHalfSize)
{return(p_Point.x > p_AabbCenter.x - p_AabbHalfSize.x && p_Point.x < p_AabbCenter.x + p_AabbHalfSize.x &&p_Point.y > p_AabbCenter.y - p_AabbHalfSize.y && p_Point.y < p_AabbCenter.y + p_AabbHalfSize.y &&p_Point.z > p_AabbCenter.z - p_AabbHalfSize.z && p_Point.z < p_AabbCenter.z + p_AabbHalfSize.z);
}/*光照衰减系数,LearnOpenGL中有具体公式*/
float LuminosityFromAttenuation(mat4 p_Light)
{const vec3 lightPosition = p_Light[0].rgb;const float constant = p_Light[0][3];const float linear = p_Light[1][3];const float quadratic = p_Light[2][3];const float distanceToLight = length(lightPosition - fs_in.FragPos);const float attenuation = (constant + linear * distanceToLight + quadratic * (distanceToLight * distanceToLight));return 1.0 / attenuation;
}/* 盒状环境光 */
vec3 CalcAmbientBoxLight(mat4 p_Light)
{const vec3 lightPosition = p_Light[0].rgb;const vec3 lightColor = UnPack(p_Light[2][0]);const float intensity = p_Light[3][3];const vec3 size = vec3(p_Light[0][3], p_Light[1][3], p_Light[2][3]);return PointInAABB(fs_in.FragPos, lightPosition, size) ? lightColor * intensity : vec3(0.0);
}/* 球状环境光 */
vec3 CalcAmbientSphereLight(mat4 p_Light)
{const vec3 lightPosition = p_Light[0].rgb;const vec3 lightColor = UnPack(p_Light[2][0]);const float intensity = p_Light[3][3];const float radius = p_Light[0][3];return distance(lightPosition, fs_in.FragPos) <= radius ? lightColor * intensity : vec3(0.0);
}void main()
{vec2 texCoords = u_TextureOffset + vec2(mod(fs_in.TexCoords.x * u_TextureTiling.x, 1), mod(fs_in.TexCoords.y * u_TextureTiling.y, 1));vec4 albedoRGBA = texture(u_AlbedoMap, texCoords) * u_Albedo; // Albedo反照率贴图数据vec3 albedo = pow(albedoRGBA.rgb, vec3(2.2)); // 这种反照率处理方式与LearOpenGL一致float metallic = texture(u_MetallicMap, texCoords).r * u_Metallic; // 金属度float roughness = texture(u_RoughnessMap, texCoords).r * u_Roughness; // 粗糙度float ao = texture(u_AmbientOcclusionMap, texCoords).r; // 环境光遮蔽AOvec3 normal;if (u_EnableNormalMapping) // 是否使用法线贴图{normal = texture(u_NormalMap, texCoords).rgb; // 法线贴图的原始值normal = normalize(normal * 2.0 - 1.0); // 法线贴图矢量坐标范围变成-1到1normal = normalize(fs_in.TBN * normal); // 变换到全局坐标系下}else{normal = normalize(fs_in.Normal); // 使用顶点着色器输出的法线}vec3 N = normalize(normal); vec3 V = normalize(ubo_ViewPos - fs_in.FragPos); // 计算视线方向vec3 F0 = vec3(0.04); F0 = mix(F0, albedo, metallic); // 插值方式得到平面的基础反射率F0// reflectance equationvec3 Lo = vec3(0.0);vec3 ambientSum = vec3(0.0); // 环境光结果for (int i = 0; i < ssbo_Lights.length(); ++i) {// 两种环境光灯光if (int(ssbo_Lights[i][3][0]) == 3){ambientSum += CalcAmbientBoxLight(ssbo_Lights[i]);}else if (int(ssbo_Lights[i][3][0]) == 4){ambientSum += CalcAmbientSphereLight(ssbo_Lights[i]);}else{// calculate per-light radiance// 光源方向vec3 L = int(ssbo_Lights[i][3][0]) == 1 ? -ssbo_Lights[i][1].rgb : normalize(ssbo_Lights[i][0].rgb - fs_in.FragPos);vec3 H = normalize(V + L);// 半程向量float distance = length(ssbo_Lights[i][0].rgb - fs_in.FragPos);float lightCoeff = 0.0; // 最终到片元处的光强系数 switch(int(ssbo_Lights[i][3][0])){case 0:lightCoeff = LuminosityFromAttenuation(ssbo_Lights[i]) * ssbo_Lights[i][3][3]; // 点光源要考虑随距离衰减break;case 1:lightCoeff = ssbo_Lights[i][3][3]; // 方向光无衰减break;// 聚光灯的计算case 2:const vec3 lightForward = ssbo_Lights[i][1].rgb;const float cutOff = cos(radians(ssbo_Lights[i][3][1]));const float outerCutOff = cos(radians(ssbo_Lights[i][3][1] + ssbo_Lights[i][3][2]));const vec3 lightDirection = normalize(ssbo_Lights[i][0].rgb - fs_in.FragPos);const float luminosity = LuminosityFromAttenuation(ssbo_Lights[i]);/* Calculate the spot intensity */const float theta = dot(lightDirection, normalize(-lightForward)); const float epsilon = cutOff - outerCutOff;const float spotIntensity = clamp((theta - outerCutOff) / epsilon, 0.0, 1.0);lightCoeff = luminosity * spotIntensity * ssbo_Lights[i][3][3];break;}vec3 radiance = UnPack(ssbo_Lights[i][2][0]) * lightCoeff;// cook-torrance brdffloat NDF = DistributionGGX(N, H, roughness); // 法线分布函数float G = GeometrySmith(N, V, L, roughness); // 几何函数vec3 F = fresnelSchlick(max(dot(H, V), 0.0), F0); // 菲涅尔项vec3 kS = F;vec3 kD = vec3(1.0) - kS;kD *= 1.0 - metallic;vec3 numerator = NDF * G * F;float denominator = 4.0 * max(dot(N, V), 0.0) * max(dot(N, L), 0.0);vec3 specular = numerator / max(denominator, 0.001);// add to outgoing radiance Lofloat NdotL = max(dot(N, L), 0.0);Lo += (kD * albedo / PI + specular) * radiance * NdotL; }}vec3 ambient = ambientSum * albedo * ao;// 环境光最终贡献vec3 color = ambient + Lo; // 环境光与cook-torrance模型累加// HDR色调映射color = color / (color + vec3(1.0));// gamma 矫正color = pow(color, vec3(1.0/2.2)); FRAGMENT_COLOR = vec4(color, albedoRGBA.a); // alpha使用反照率贴图
}
Fragment Shader大体分为三部分:
- 从贴图中获取反照率、金属度、粗糙度、法线数据
- 计算灯光光照,环境光灯光只影响环境光;方向光、聚光灯、点光源会影响光强lightCoeff,最终的光照使用cook-torrance模型进行计算,公式可以参考LearnOpenGL
- 最后进行环境光与PBR模型结果进行叠加,并进行色调映射与gamma矫正,这里使用的公式在LearnOpenGL中都有的
总结:
这个PBR Shader整体上与LearnOpenGL中的理论一致,看完LearnOpenGL之后再看这个Shader就比较简单了。