主要功能将PC端的数据接收下来,分发到不同的设备,也是轮询设备数据读取回来,打包回传到PC端,数据包包头包尾识别,数据校验,接收超时处理,将协议结构化处理,协议的改动不需要改动程序,中断接收一帧完成置标志位交由上层协议程序校验并处理转发
协议格式定义,每一个位都进行了定仪
#ifndef PROTOCOL_H
#define PROTOCOL_H
#include "define.h"
//IO_EMM_31
typedef struct
{uchar Stx;uchar Length;uchar ID;uchar TollCollectorID[3];uchar LoginDuration[2];uchar VehicleClass;union{uchar byte;struct{uchar Payment:4;uchar Axle:4;}BIT;}AxlePaymentDisplay;union{uint word;uchar byte[2];}TollFare;union{uchar byte;struct{ uchar reserved:1;uchar Exit_LSS_Rlight:1;uchar BarrierClose:1;uchar BarrierOpen:1;uchar Entry_LSS_Rlight:1;uchar Entry_LSS_Glight:1;uchar LaneLog:1;uchar zero:1;}BIT;}TMU_Control1;union{uchar byte;struct{uchar EmergencyAlarm:1;uchar EvasionAlarm:1;uchar DiscrepancyAlarm:1;uchar MisregistrationAlarm:1;uchar reserved:1;uchar AxleDectorFault:1;uchar BoothEquipmentFault:1;uchar zero:1;}BIT;}TMU_Control2;union{uchar byte;struct{uchar EmergencyAlarmRstBut:1;uchar EvalsionAlarmRstBut:1;uchar DiscrepancyAlarmRstBut:1;uchar MisregistrationAlarmRstBut:1;uchar AxleDetectorOVerride:1;uchar KeyInOverrideSelect:1;uchar reserved:1;uchar zero:1;}BIT;}ConStatus1;union{uchar byte;struct{uchar resetved:4;uchar TMUCommFail:1;uchar TMUDimmerOverAct:1;uchar AllSignageDimmming:1;uchar zero:1;}BIT;}ConStatus2;union{uchar byte;struct{uchar reserved:1;uchar CanopyBeacon:1;uchar Entry_LSS_Rlight:1;uchar Entry_LSS_Glight:1;uchar TPS_Glight:1;uchar TPS_Rlight:1;uchar DimmingNormal:1;uchar zero:1;}BIT;}SignageControl;union{uchar byte;struct{uchar TPSCommFail:1;uchar reserve2:1;uchar reserve1:1;uchar TPSTempHigher70:1;uchar CLSCommFail:1;uchar CLSPixelFaultDetect:1;uchar CLSTempHigher70:1;uchar zero:1;}BIT;}TPS_CLSFaultStatus;union{uchar byte;struct{uchar EntryCommFail:1;uchar ExitCommFail:1;uchar RlightAspectHigher50:1;uchar RlightAspectHigher25:1;uchar TempHigher70:1;uchar reseved:1;uchar Rlight:1;uchar zero:1;}BIT;}ExitLSSStatus;union{uchar byte;struct{uchar GlightAspectHigher50:1;uchar GlightAspectHigher25:1;uchar RlightAspectHigher50:1;uchar RlightAspectHigher25:1;uchar TempHigher70:1;uchar Glight:1;uchar Rlight:1;uchar zero:1;}BIT;}EntryLSSStatus;union{uchar byte;struct{uchar ShortDetect:1;uchar reserved:2;uchar KickBarAlarm:1;uchar CabinetOpen:1;uchar BarrierColse:1;uchar BarrierOpen:1;uchar zero:1;}BIT;}LocalIOInputStatus;union{uchar byte;struct{uchar Class0:1;uchar Class1:1;uchar Class2:1;uchar Class3:1;uchar Class4:1;uchar Class5:1;uchar Class6:1;uchar zero:1;}BIT;}AutoTollInputStatus1;union{uchar byte;struct{uchar Class7:1;uchar Class8:1;uchar Class9:1;uchar ClassAdd1:1;uchar LaneOpen:1;uchar LaneClose:1;uchar reserved:1;uchar zero:1;}BIT;}AutoTollInputStatus2;union{uchar byte;struct{uchar Axle1:1;uchar Axle2:1;uchar Axle3:1;uchar Axle4:1;uchar Axle5:1;uchar Axle6:1;uchar reserved:1;uchar zero:1;}BIT;}AutoTollInputStatus3;uchar Checksum;uchar Etx;
}IO_EMM_31;//IO_EMM_32
typedef struct
{uchar Stx;uchar Length;uchar ID;union{uchar byte;struct{uchar reserved:1;uchar Dimmer:3;uchar Normal:3;uchar zero:1;}BIT;}TPSSetting;union{uchar byte;struct{uchar reserved:1;uchar Dimmer:3;uchar Normal:3;uchar zero:1;}BIT;}CLSSetting;union{uchar byte;struct{uchar reserved:1;uchar Dimmer:3;uchar Normal:3;uchar zero:1;}BIT;}EntryLSSSetting;union{uchar byte;struct{uchar reserved:1;uchar Dimmer:3;uchar Normal:3;uchar Zero:1;}BIT;}ExitLSSSetting;uchar Checksum;uchar Etx;
}IO_EMM_32;//IO_TMU
typedef struct
{uchar Stx;uchar Length;uchar ID;uchar TollCollectorID[3];uchar LoginDuration[2];uchar VehicleClass;union{uchar byte;struct{uchar Payment:4;uchar Axle:4;}BIT;}AxlePaymentDisplay;union{uchar byte;struct{ uchar reserved:1;uchar Exit_LSS_Rlight:1;uchar BarrierClose:1;uchar BarrierOpen:1;uchar Entry_LSS_Rlight:1;uchar Entry_LSS_Glight:1;uchar LaneLog:1;uchar zero:1;}BIT;}TMU_Control1;union{uchar byte;struct{uchar EmergencyAlarm:1;uchar EvasionAlarm:1;uchar DiscrepancyAlarm:1;uchar MisregistrationAlarm:1;uchar reserved:1;uchar AxleDectorFault:1;uchar BoothEquipmentFault:1;uchar zero:1;}BIT;}TMU_Control2;union{uchar byte;struct{uchar EmergencyAlarmRstBut:1;uchar EvalsionAlarmRstBut:1;uchar DiscrepancyAlarmRstBut:1;uchar MisregistrationAlarmRstBut:1;uchar AxleDetectorOVerride:1;uchar KeyInOverrideSelect:1;uchar reserved:1;uchar zero:1;}BIT;}ConStatus1;union{uchar byte;struct{uchar resetved:5;uchar TMUDimmerOverAct:1;uchar AllSignageDimming:1;uchar zero:1;}BIT;}ConStatus2;uchar Checksum;uchar Etx;
}IO_TMU;//IO_TPS
typedef struct
{uchar Stx;uchar Length;uchar ID;union{uint word;uchar byte[2];}TollFare;union{uchar byte;struct{uchar DispPleasePaid:1;uchar DispThankyou:1;uchar Rlight:1;uchar Glight:1;uchar BrightnessControl:3;uchar reserved:1;}BIT;}LedDisplay;union{uchar byte;struct{uchar TempHigher70:1;uchar reserved:7;}BIT;}Status;uchar Checksum;uchar Etx;
}IO_TPS;//IO_CLS
typedef struct
{uchar Stx;uchar Length;uchar ID;uchar VehicleClass;union{uchar byte;struct{uchar Axle:3;uchar reserved1:1;uchar RelayContactClose:1;uchar reserved2:3;}BIT;}AxleCounterDisplay;union{uchar byte;struct{uchar reserved:4;uchar Brightness:3;uchar zero:1;}BIT;}BrightnessControl;union{uchar byte;struct{uchar TempHigher70:1;uchar PixelFaultDetected:1;uchar reserved:6;}BIT;}Status;uchar Checksum;uchar Etx;
}IO_CLS;//IO_LSS
typedef struct
{uchar Stx;uchar Length;uchar ID;union{uchar byte;struct{uchar Rlight:1;uchar Glight:1;uchar reserved:6; }BIT;}SignalDisp;union{uchar byte;struct{uchar RlightAspectHigher25:1;uchar RlightAspectHigher50:1;uchar GlightAspectHigher25:1;uchar GlightAspectHigher50:1;uchar BrightnessControl:3;uchar reserved:1; }BIT;}Status1;union{uchar byte;struct{uchar TempHigher70:1;uchar reserved:7;}BIT;}Status2;uchar Checksum;uchar Etx;
}IO_LSS;typedef struct
{uchar Dimmer;uchar Normal;
}BRIGHTNESS;
#endif
中断接收与发送
void IntUart0Rx( void ) interrupt 4
{uchar temp;static uchar MsgLen;if( RI_0 ){RI_0 = 0;temp = S0BUF;Timer1ms[TIMER_COM_DEV].Tick = 10;Timer1ms[TIMER_COM_DEV].Flg.BIT.Enable = 1;Timer[TIMER_RESPONSE].Tick = 5;ACC = temp;if( P==RB8_0 ){if( !DevStrEndFlg ){if( temp==0xaa ){ DevStrEndFlg = 1;IO2Dev.RecvPtr = 0;IO2Dev.RecvBuf[IO2Dev.RecvPtr++] = temp;IO2Dev.Error.byte = 0;}}else{if( temp==0xab && IO2Dev.RecvPtr==MsgLen ){DevStrEndFlg = 0;IO2Dev.RecvBuf[IO2Dev.RecvPtr++] = temp;IO2Dev.Flg.BIT.Recv = 1;IO2Dev.RecvLen = IO2Dev.RecvPtr;}/*else if( temp==0xaa && IO2Dev.RecvPtr!=MsgLen-1 ){IO2Dev.RecvPtr = 0;IO2Dev.RecvBuf[IO2Dev.RecvPtr++] = temp;}*/else if( IO2Dev.RecvPtr==2 ){IO2Dev.ID = temp;IO2Dev.RecvBuf[IO2Dev.RecvPtr++] = temp;switch( IO2Dev.ID ){case IO_TMU_ID:MsgLen = sizeof( IO_TMU )-1;break;case IO_TPS_ID:MsgLen = sizeof( IO_TPS )-1;break;case IO_CLS_ID:MsgLen = sizeof( IO_CLS )-1;break;case IO_ELSS_ID:MsgLen = sizeof( IO_LSS )-1;break;case IO_XLSS_ID:MsgLen = sizeof( IO_LSS )-1;break;default:DevStrEndFlg = 0;}}else if( IO2Dev.RecvPtr<RECVBUF_LEN ){IO2Dev.RecvBuf[IO2Dev.RecvPtr++] = temp;}else //接收数据溢出{DevStrEndFlg = 0;IO2Dev.RecvPtr = 0;}
// flg = IO2Dev.RecvPtr;}}else{IO2Dev.Error.BIT.Even = 1;}}else if( S0STAT&0x08 )//Framing Error{S0STAT &= ~0x08;IO2Dev.Error.BIT.Framing = 1;}else if( S0STAT&0x04 )//Break Detect{S0STAT &= ~0x04;IO2Dev.Error.BIT.BreakDetect = 1;}else if( S0STAT&0x02 )//Overrun Error{S0STAT &= ~0x02;IO2Dev.Error.BIT.Overrun = 1;}
}//串行口0的发送中断程序
void IntUart0Tx( void ) interrupt 7
{Uart0SendData();
}
以指针提取数据
#include "Emm2IO.h"
#include "com.h"
#include "protocol.h"
#include "systemtask.h"
#include "IOCheck.h"IO_EMM_31 IOEmm31;
extern BUF_DEF Emm2IO;
extern IO_TMU IOTmu;
extern IO_TPS IOTps;
extern IO_CLS IOCls;
extern IO_LSS IOEntryLss;
extern IO_LSS IOExitLss;
extern BRIGHTNESS TpsBrightness,ClsBrightness,EntryLssBrightness,ExitLssBrightness;extern IO_CHECK_DEF IoCheck;
extern TIMER_DEF Timer[TIMER_NUM];
extern uchar flg;
void Emm2IOInit( void )
{//31IOEmm31.Stx = 0xaa;IOEmm31.Length = 0x18;IOEmm31.ID = 0x20;IOEmm31.ConStatus1.byte = 0;IOEmm31.ConStatus2.byte = 0x10;IOEmm31.TPS_CLSFaultStatus.byte = 0x11;IOEmm31.ExitLSSStatus.byte = 0x03;IOEmm31.EntryLSSStatus.byte = 0x00;IOEmm31.LocalIOInputStatus.byte = 0x00;IOEmm31.AutoTollInputStatus1.byte = 0x00;IOEmm31.AutoTollInputStatus2.byte = 0x00;IOEmm31.AutoTollInputStatus3.byte = 0x00;IOEmm31.Etx = 0xab;Emm2IO.Flg.byte = 0;Emm2IO.SendLen = 0;Emm2IO.RecvLen = 0;Emm2IO.SendPtr = 0;Emm2IO.RecvPtr = 0;Timer[TIMER_STOP].Flg.BIT.TimeOut = 0;Timer[TIMER_STOP].Tick = 500;Timer[TIMER_STOP].Flg.BIT.Enable = 1;
}
//从Emm2IOController31的接收数据中取出需要的内容放到设备缓冲区中
void CopyEmm31ToDev( IO_EMM_31 *IoEmm31Ptr )
{//TMUIOTmu.TollCollectorID[0] = IoEmm31Ptr->TollCollectorID[0];IOTmu.TollCollectorID[1] = IoEmm31Ptr->TollCollectorID[1];IOTmu.TollCollectorID[2] = IoEmm31Ptr->TollCollectorID[2];IOTmu.LoginDuration[0] = IoEmm31Ptr->LoginDuration[0];IOTmu.LoginDuration[1] = IoEmm31Ptr->LoginDuration[1];IOTmu.VehicleClass = IoEmm31Ptr->VehicleClass;IOTmu.AxlePaymentDisplay.byte = IoEmm31Ptr->AxlePaymentDisplay.byte;IOTmu.TMU_Control1.byte = IoEmm31Ptr->TMU_Control1.byte;IOTmu.TMU_Control2.byte = IoEmm31Ptr->TMU_Control2.byte;//TPSIOTps.TollFare.byte[0] = IoEmm31Ptr->TollFare.byte[0];IOTps.TollFare.byte[1] = IoEmm31Ptr->TollFare.byte[1];IOTps.LedDisplay.BIT.Glight = IoEmm31Ptr->SignageControl.BIT.TPS_Glight;IOTps.LedDisplay.BIT.Rlight = IoEmm31Ptr->SignageControl.BIT.TPS_Rlight;if( (((IoEmm31Ptr->TollFare.byte[0]&0xf0)>>4) == 0x000c) && (IoEmm31Ptr->AxlePaymentDisplay.BIT.Payment == 0x0b) ){IOTps.LedDisplay.BIT.DispPleasePaid = 1;IOTps.LedDisplay.BIT.DispThankyou = 0;}else if( (((IoEmm31Ptr->TollFare.byte[0]&0xf0)>>4) == 0x0000c) && (IoEmm31Ptr->AxlePaymentDisplay.BIT.Payment != 0x0b) ){IOTps.LedDisplay.BIT.DispPleasePaid = 0;IOTps.LedDisplay.BIT.DispThankyou = 1;}else if( ((IoEmm31Ptr->TollFare.byte[0]&0xf0)>>4) == 0x0000b ){IOTps.LedDisplay.BIT.DispPleasePaid = 0;IOTps.LedDisplay.BIT.DispThankyou = 0;}else{IOTps.LedDisplay.BIT.DispPleasePaid = 0;IOTps.LedDisplay.BIT.DispThankyou = 0;}//CLSIOCls.VehicleClass = IoEmm31Ptr->VehicleClass;if( IoEmm31Ptr->AxlePaymentDisplay.BIT.Axle>0 && IoEmm31Ptr->AxlePaymentDisplay.BIT.Axle<7 ){IOCls.AxleCounterDisplay.BIT.Axle = IoEmm31Ptr->AxlePaymentDisplay.BIT.Axle;}else{IOCls.AxleCounterDisplay.BIT.Axle = 0;}IOCls.AxleCounterDisplay.BIT.RelayContactClose = IoEmm31Ptr->SignageControl.BIT.CanopyBeacon;//EntryLSSIOEntryLss.SignalDisp.BIT.Rlight = IoEmm31Ptr->SignageControl.BIT.Entry_LSS_Rlight;if( IoEmm31Ptr->SignageControl.BIT.Entry_LSS_Glight && IOEmm31.LocalIOInputStatus.BIT.BarrierOpen &&!IOEmm31.LocalIOInputStatus.BIT.BarrierColse ){IOEntryLss.SignalDisp.BIT.Glight = 1;IOEntryLss.SignalDisp.BIT.Rlight = 0;}else{IOEntryLss.SignalDisp.BIT.Glight = 0;IOEntryLss.SignalDisp.BIT.Rlight = 1;}//ExitLSSif( IoEmm31Ptr->SignageControl.BIT.DimmingNormal ){IOTps.LedDisplay.BIT.BrightnessControl = TpsBrightness.Dimmer;IOCls.BrightnessControl.BIT.Brightness = ClsBrightness.Dimmer;IOEntryLss.Status1.BIT.BrightnessControl = EntryLssBrightness.Dimmer;IOExitLss.Status1.BIT.BrightnessControl = ExitLssBrightness.Dimmer;}else{IOTps.LedDisplay.BIT.BrightnessControl = TpsBrightness.Normal;IOCls.BrightnessControl.BIT.Brightness = ClsBrightness.Normal;IOEntryLss.Status1.BIT.BrightnessControl = EntryLssBrightness.Normal;IOExitLss.Status1.BIT.BrightnessControl = ExitLssBrightness.Normal;}
}
//从接收的Emm2IOController31的数据更新Emm31缓冲区
void CopyEmm31ToEmm31Buf( IO_EMM_31 *IoEmm31Ptr )
{uchar *Sptr,*Dptr,i;Sptr = (uchar*)IoEmm31Ptr;Dptr = (uchar*)&IOEmm31;for( i=0; i<11; i++ ){*(Dptr+i+3) = *(Sptr+i+3);}*(Dptr+16) = *(Sptr+16);
}
//更新各设备的亮度值
void CopyEmm32ToDev( IO_EMM_32 *IoEmm32Ptr )
{//TPSTpsBrightness.Dimmer = IoEmm32Ptr->TPSSetting.BIT.Dimmer;TpsBrightness.Normal = IoEmm32Ptr->TPSSetting.BIT.Normal;//CLSClsBrightness.Dimmer = IoEmm32Ptr->CLSSetting.BIT.Dimmer;ClsBrightness.Normal = IoEmm32Ptr->CLSSetting.BIT.Normal;//EntryLSSEntryLssBrightness.Dimmer = IoEmm32Ptr->EntryLSSSetting.BIT.Dimmer;EntryLssBrightness.Normal = IoEmm32Ptr->EntryLSSSetting.BIT.Normal;//ExitLSSExitLssBrightness.Dimmer = IoEmm32Ptr->ExitLSSSetting.BIT.Dimmer;ExitLssBrightness.Normal = IoEmm32Ptr->ExitLSSSetting.BIT.Normal;
}
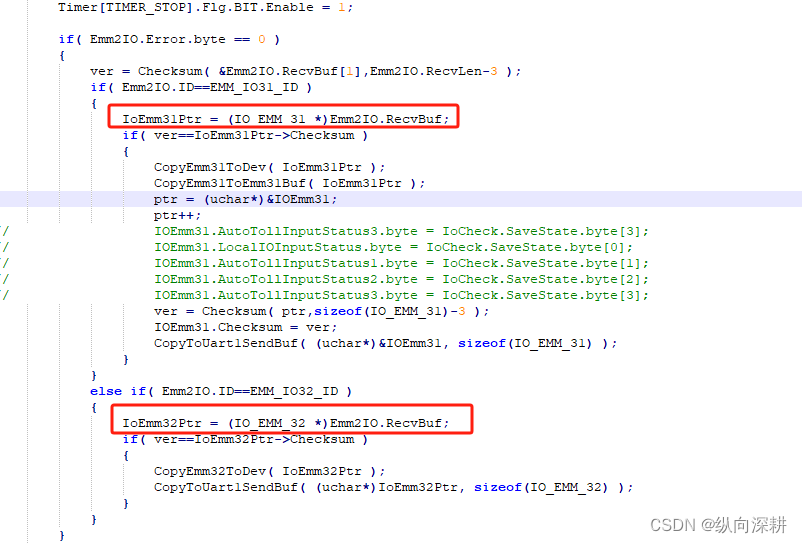
//判断是否已从EMM接收完整的数据包,并进行处理
void Emm2IOMain( void )
{uchar ver,*ptr;IO_EMM_31 *IoEmm31Ptr;IO_EMM_32 *IoEmm32Ptr;if( Emm2IO.Flg.BIT.Recv ){Emm2IO.Flg.BIT.Recv = 0;Timer[TIMER_STOP].Tick = 500;Timer[TIMER_STOP].Flg.BIT.Enable = 1;if( Emm2IO.Error.byte == 0 ){ver = Checksum( &Emm2IO.RecvBuf[1],Emm2IO.RecvLen-3 );if( Emm2IO.ID==EMM_IO31_ID ){IoEmm31Ptr = (IO_EMM_31 *)Emm2IO.RecvBuf;if( ver==IoEmm31Ptr->Checksum ){CopyEmm31ToDev( IoEmm31Ptr );CopyEmm31ToEmm31Buf( IoEmm31Ptr );ptr = (uchar*)&IOEmm31;ptr++;
// IOEmm31.AutoTollInputStatus3.byte = IoCheck.SaveState.byte[3];
// IOEmm31.LocalIOInputStatus.byte = IoCheck.SaveState.byte[0];
// IOEmm31.AutoTollInputStatus1.byte = IoCheck.SaveState.byte[1];
// IOEmm31.AutoTollInputStatus2.byte = IoCheck.SaveState.byte[2];
// IOEmm31.AutoTollInputStatus3.byte = IoCheck.SaveState.byte[3];ver = Checksum( ptr,sizeof(IO_EMM_31)-3 );IOEmm31.Checksum = ver;CopyToUart1SendBuf( (uchar*)&IOEmm31, sizeof(IO_EMM_31) );}}else if( Emm2IO.ID==EMM_IO32_ID ){IoEmm32Ptr = (IO_EMM_32 *)Emm2IO.RecvBuf;if( ver==IoEmm32Ptr->Checksum ){CopyEmm32ToDev( IoEmm32Ptr );CopyToUart1SendBuf( (uchar*)IoEmm32Ptr, sizeof(IO_EMM_32) );}}}else{Emm2IO.Error.byte = 0;}Emm2IO.RecvPtr = 0;Emm2IO.ID = 0;}//When no polling with EMM > 5 seconds.if( Timer[TIMER_STOP].Flg.BIT.TimeOut ){Timer[TIMER_STOP].Flg.BIT.TimeOut = 0;//TMUIOTmu.TollCollectorID[0] = 0x0b;IOTmu.TollCollectorID[1] = 0xbb;IOTmu.TollCollectorID[2] = 0xbb;IOTmu.LoginDuration[0] = 0xbb;IOTmu.LoginDuration[1] = 0xbb;IOTmu.VehicleClass = 0xbb;IOTmu.AxlePaymentDisplay.byte = 0xbb;IOTmu.TMU_Control1.byte = 0x00;IOTmu.TMU_Control2.byte = 0x40;//TPSIOTps.TollFare.word = 0xbbbb;IOTps.LedDisplay.BIT.Rlight = 1;IOTps.LedDisplay.BIT.Glight = 0;IOTps.LedDisplay.BIT.DispPleasePaid = 0;IOTps.LedDisplay.BIT.DispThankyou = 0;//CLSIOCls.VehicleClass = 0xbb;IOCls.AxleCounterDisplay.byte = 0x00;//Entry LssIOEntryLss.SignalDisp.byte = 0x01;//Exit LssIOExitLss.SignalDisp.byte = 0x01;}
}
主程序循环,
代码多年前写,基于飞利浦双串口51单片机,程序结构是大循环前后台标志,就算现在用上了linux、rtos等的方式,程序接收处理方式差别不大,只是实现起来更简单
下面是完整工程连接
链接:https://pan.baidu.com/s/1bXOrMRH6Gf7kcjra4uANtA?pwd=1234
提取码:1234


![Kitex踩坑 [Error] KITEX: processing request error,i/o timeout](https://img-blog.csdnimg.cn/cb3a490b2ba943d5b4e6edb18a1b1095.png)