目录
1.算法运行效果图预览
2.算法运行软件版本
3.部分核心程序
4.算法理论概述
5.算法完整程序工程
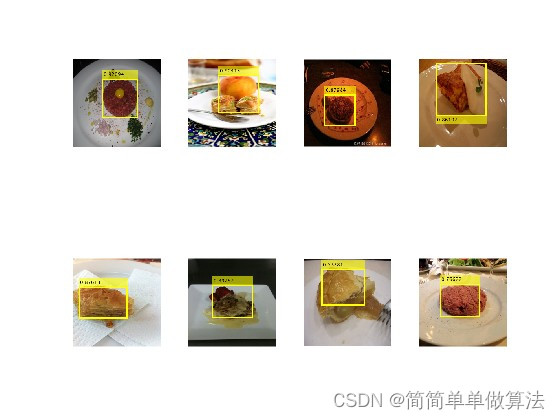
1.算法运行效果图预览




2.算法运行软件版本
matlab2022a
3.部分核心程序
% 图像大小
image_size = [224 224 3];
num_classes = size(VD,2)-1;% 目标类别数量
anchor_boxes = [% 预定义的锚框大小43 5918 2223 2984 109];
% 加载预训练的 ResNet-50 模型
load Model_resnet50.mat% 用于目标检测的特征层
featureLayer = 'activation_40_relu';
% 构建 YOLOv2 网络
lgraph = yolov2Layers(image_size,num_classes,anchor_boxes,Initial_nn,featureLayer);options = trainingOptions('sgdm', ...'MiniBatchSize', 8, ....'InitialLearnRate',1e-3, ...'MaxEpochs',100,...'CheckpointPath', checkpoint_folder, ...'Shuffle','every-epoch', ...'ExecutionEnvironment', 'gpu');% 设置训练选项
% 训练 YOLOv2 目标检测器
[detector,info] = trainYOLOv2ObjectDetector(train_data,lgraph,options);
00774.算法理论概述
美食检测是一项利用计算机视觉技术来识别和分类食物图像的任务。
特征提取是食品检测的核心步骤,其目的是从输入图像中提取出有效的特征,以便于后续的分类。常见的特征提取方法包括手工提取特征和深度学习网络提取特征。
手工提取特征:通过人工选择一些与食品相关的特征,如颜色、纹理、形状等,然后使用传统的计算机视觉技术(如SIFT、HOG等)提取这些特征。
深度学习网络提取特征:使用深度学习网络对输入图像进行自动的特征提取。常见的深度学习网络包括卷积神经网络(CNN)和循环神经网络(RNN)等。
CNN提取特征:CNN是一种基于卷积层的深度学习网络,其特点是能够自动从输入图像中学习到有效的特征。CNN主要由卷积层、池化层和全连接层组成。卷积层可以提取输入图像中的局部特征,池化层可以降低特征的维度,全连接层可以将局部特征组合成全局特征。CNN的常用结构包括VGG、ResNet和Inception等。
RNN提取特征:RNN是一种基于递归神经网络的深度学习网络,其特点是能够处理序列数据(如文本、语音和视频等)。在食品检测中,RNN可以用于对食品序列进行分析和处理。常见的RNN结构包括LSTM和GRU等。
YoloV2是一种基于深度学习的目标检测算法,由Joseph Redmon等人在2016年提出。相比于其他目标检测算法,YoloV2具有较高的检测速度和准确性,同时能够同时检测多个目标,因此在美食检测等应用场景中具有较好的表现。
YoloV2的主要原理是通过对输入图像进行网格划分,将每个网格视为一个单元格,然后在每个单元格中预测多个目标框及其所属类别。相比于其他目标检测算法,YoloV2的独特之处在于其将目标检测任务转化为一个单次前向传递的回归问题,即将目标框的位置和类别预测问题转化为一个端到端的回归问题。
具体来说,YoloV2采用CNN作为骨干网络,通过对CNN的最后一层进行修改,将输出特征图的大小调整为指定的大小,使得每个特征点对应于输入图像上的一个像素点。然后,对于每个特征点,YoloV2通过一个轻量级的全连接层来预测目标框的位置和类别概率。同时,为了解决不同尺寸的目标框对预测结果的影响,YoloV2采用多尺度预测的方法,即在多个不同尺寸的特征图上进行预测。
5.算法完整程序工程
OOOOO
OOO
O