| 文献阅读笔记 | ||
| 简介 | 题目 | Fast R-CNN |
| 作者 | Ross Girshick | |
| 原文链接 | https://arxiv.org/pdf/1504.08083.pdf 目标检测系列——开山之作RCNN原理详解-CSDN博客 Fast R-CNN讲解_fast rcnn-CSDN博客 Rcnn、FastRcnn、FasterRcnn理论合集_rcnn fastrcnn fasterrcnn_沫念·的博客-CSDN博客 | |
| 关键词 | NUll | |
| 研究问题 | 目标检测任务背景:首先确定大量候选对象位置;其次对候选对象细化以确定目标位置。这些问题的解决往往折中了速度、精度或者简单性。 之前的方法: RCNN提取2000个候选框冗余工作太多。 SPP算法也有缺点:仅使用log损失函数微调无法更新空间金字塔池化前的卷积层,限制了非常深的网络的准确性。 | |
| 研究方法 | Fast R - CNN:用全连接层分类。 ROI pooling:感兴趣区域池化。使用最大池化将任何有效感兴趣区域内的特征转换为具有固定空间范围H × W (例如, 7 × 7)的小特征映射,其中H和W是独立于任何特定RoI的层超参数。每个RoI由一个四元组特征(r,c,h,w)定义,该(r,c,h,w)指定其左上角(r,c)及其高度和宽度(h,w)。是SSp的特例,其中只有一个金字塔层。 从预训练的网络中初始化:将最后一个最大池化层替换为RoI池化层,通过设置H和W与网络的第一个全连接层(例如,对于VGG16 , H = W = 7)兼容来配置RoI池化层。其次,将网络的最后一个全连接层和softmax (分别训练用于1000 - way ImageNet分类)替换为前面描述的两个兄弟层( K + 1个类别上的全连接层和softmax以及类别特定的边界框回归)。第三,修改网络以获取两个数据输入:图像列表和这些图像中的RoIs列表。 Multi-task loss. Mini-batch sampling. | |
| 研究结论 | 1.比R - CNN、SPPnet拥有更高的检测质量 2.训练是单阶段的,使用多任务损失3.训练可以更新所有的网络层4.特征缓存不需要磁盘存储 | |
| 创新不足 | 候选区域的选择仍然不是很高效 | |
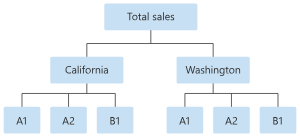
| 额外知识 | RCNN网络 | |
(论文阅读11/100)Fast R-CNN
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.rhkb.cn/news/180135.html
如若内容造成侵权/违法违规/事实不符,请联系长河编程网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章
《C/C++代码审计实践》一书出版了
我撰写了代码审计一书,包括了C、C、Java语言,加起来有600多页,书籍太厚,印刷成本比较高,出版社对于代码审计将来的销量也有所担心,他们更担心的在书中涉及到了对国家标准的解读,尤其是国家军用标…

XML External Entity-XXE-XML实体注入
XML 实体?
XML 实体允许定义标签,在解析 XML 文档时这些标签将被内容替换。一般来说,实体分为三种类型:
内部实体
外部实体
参数实体。
必须在文档类型定义(DTD)中创建实体 一旦 XML 文档被解析器处理,它将js用定义的常量“Jo Smith”替换定义的实体。正如您所看到…
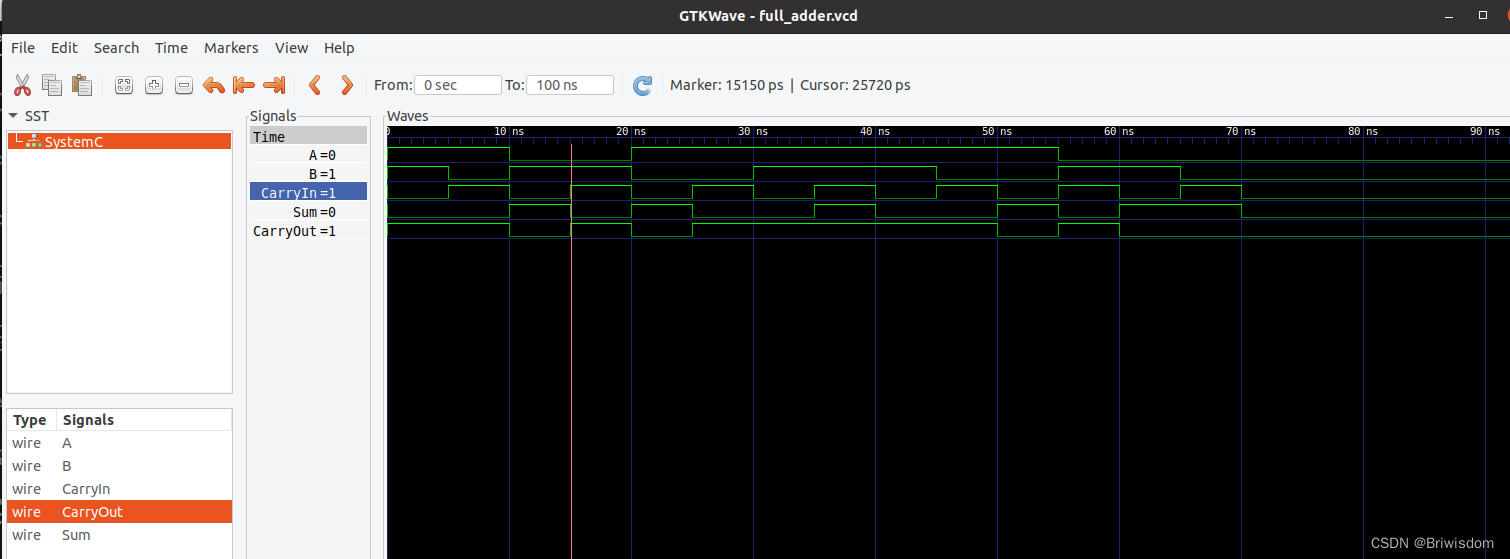
SystemC入门完整编写示例:全加器测试平台
导读: 本文将完整演示基于systemC编写一个全加器的测试平台。具体内容包括:激励平台,监控平台,待测单元的编写,波形文件读取。 1,main函数模块 搭建一个测试平台主要由:Driver, Monitor, DUT(design under …
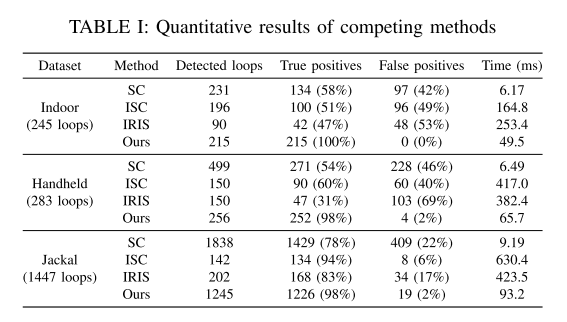
【实验记录】为了混毕业·读读论文叭
PR曲线
1. Robust_Place_Recognition_using_an_Imaging_Lidar
在第三节方法中,提到了一些列处理步骤,分析来与vins相似,在vins中是关键帧检索、特征提取、DBoW查询、描述子匹配、PnP RANSAC求解。
第四节的实验部分,没有绘制pr…

Aop自定义注解生成日志
Aop自定义注解生成日志
1.编写自定义注解
//表示此注解可以标注在方法上
Target(ElementType.METHOD)
//运行时生效
Retention(RetentionPolicy.RUNTIME)
public interface OpetionLog {//定义一个变量,可以接收参数String value() default "";}2.Cont…

【完美世界】石昊拒绝云曦相认,爱而不得,云曦悲伤无助
Hello,小伙伴们,我是小郑继续为大家深度解析国漫资讯。
深度爆料《完美世界云曦篇》最新一集,为了云曦,石昊不远十万里,亲自送她回家,这份感情之真挚,绝对毋庸置疑。然而,令人感到不解的是&…

二维码智慧门牌管理系统升级:引领政务服务、寄件、开锁、刻章新潮流
文章目录 前言一、政务服务二、寄件服务三、便民开锁和刻章服务四、应用范围 前言
在科技不断进步的时代,二维码智慧门牌管理系统升级版正在改变我们的生活,为政务服务、寄件、便民开锁、刻章等多种业务应用提供全新的解决方案,使我们的日常…
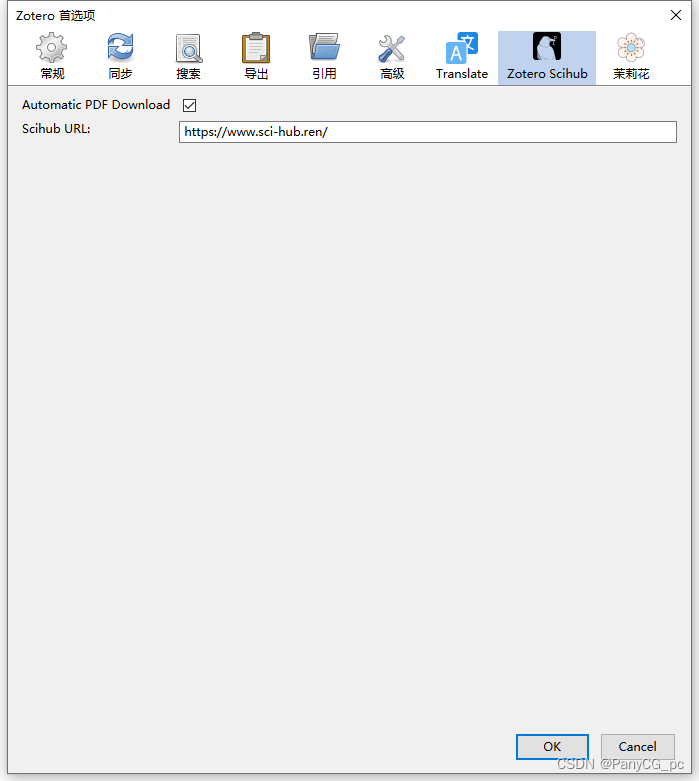
Zotero 超好用插件的下载链接及配置方法(PDF-translate/ZotFile/茉莉花/Zotero Scihub)
目录 前言插件安装方法插件一:文献翻译插件(pdf-translate)插件二:文献附件管理(ZotFile)插件三:中文文献插件(茉莉花)插件四:Sci-Hub 自动下载文献ÿ…
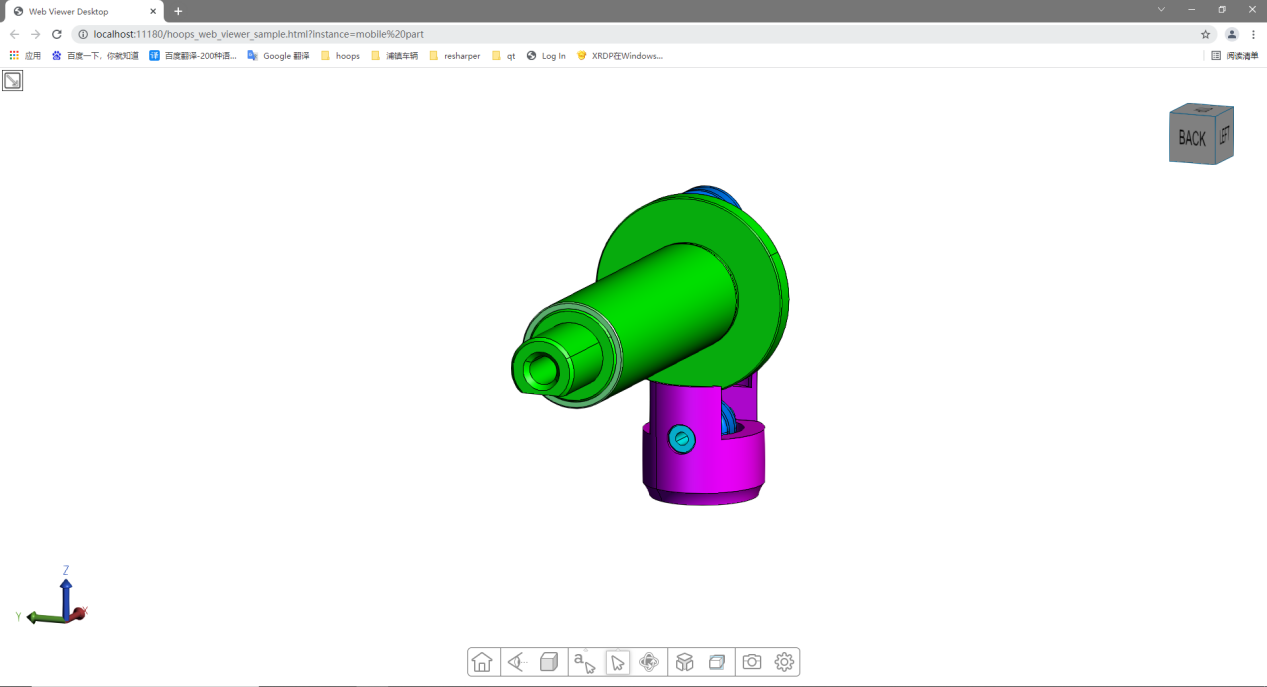
3D模型格式转换工具HOOPS Exchange对工业级3D产品HOOPS的支持与应用
一、概述
HOOPS Exchange是一套高性能模型转换软件库,可以给软件提供强大的模型的导入和导出功能,我们可以将其单独作为转换工具使用,也可以将其集成到自己的软件中。
同样,HOOPS 的其它产品,也离不开HOOPS Exchange…
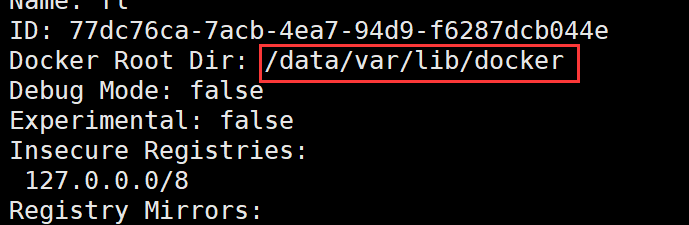
Docker学习——②
文章目录 1、Docker是什么1.1 Docker本质1.2 Docker的引擎迭代1.3 Docker和虚拟机的区别1.4 Docker 为什么比虚拟机资源利用率高,启动快?1.5 Docker 和 JVM 虚拟化的区别? 2、Docker架构3、Docker生态3.1 新时代软件诉求3.2 Docker 解决方案 …
蓝桥杯 (C++ 求和 等差数列 顺子日期 灌溉)
目录 1、求和
题目:
思路:
代码:
2、等差数列
题目:
思路: 代码:
3、顺子日期
题目:
思路:
代码:
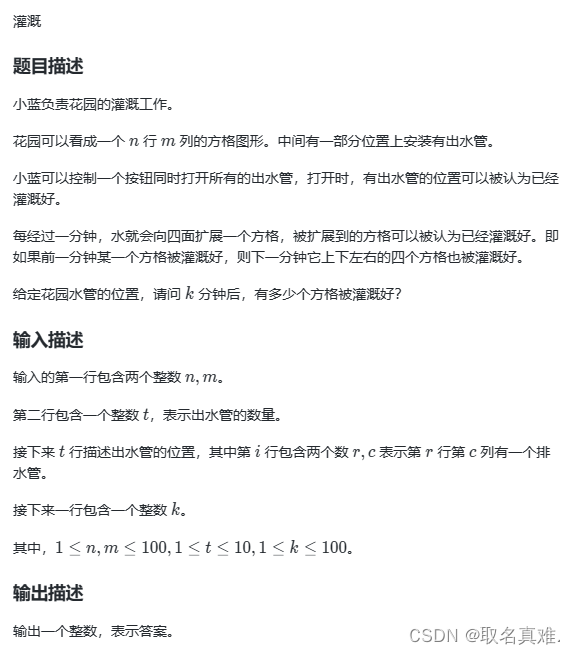
4、灌溉
题目:
代码: 1、求和…

误删的文件恢复了成乱码 误删的文件恢复了成乱码怎么调整
电脑系统:Windows11
电脑型号:惠普
软件版本:EasyRcovery14
关于电脑,我们可以说是非常熟悉,并熟练掌握了对电脑的最基本操作,比如复制、粘贴、新建、删除文件。但我们真的很懂它吗?比如误删…
Azure 机器学习 - 设置 AutoML 训练时序预测模型
目录 一、环境准备二、训练和验证数据三、配置试验支持的模型配置设置特征化步骤自定义特征化 四、可选配置频率和目标数据聚合启用深度学习目标滚动窗口聚合短时序处理非稳定时序检测和处理 五、运行试验六、用最佳模型进行预测用滚动预测评估模型精度预测未来 七、大规模预测…
计算虚拟化3——I/O设备虚拟化
目录
I/O基本概念
I/O设备与CPU连接图
CPU与I/O设备的交互
访问I/O设备(IO Access)
数据传输(Data Tronhsfer)
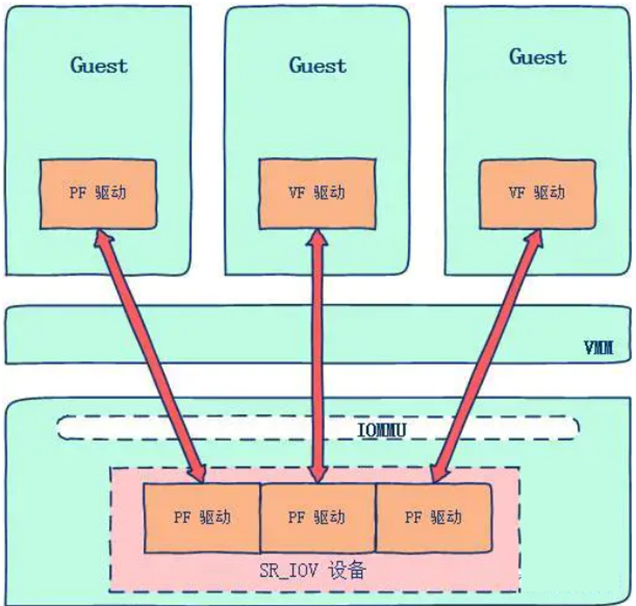
I/O设备虚拟化技术
软件辅助全虚拟化
半虚拟化
Virtio协议基本概念
Virtqueue讲解
硬件辅助全虚拟化
I/O…
【iOS免越狱】利用IOS自动化WebDriverAgent实现自动直播间自动输入
1.目标
由于看直播的时候主播叫我发 666,支持他,我肯定支持他呀,就一直发,可是后来发现太浪费时间了,能不能做一个直播间自动发 666 呢?于是就开始下面的操作。
2.操作环境 iPhone一台 WebDriverAgent …
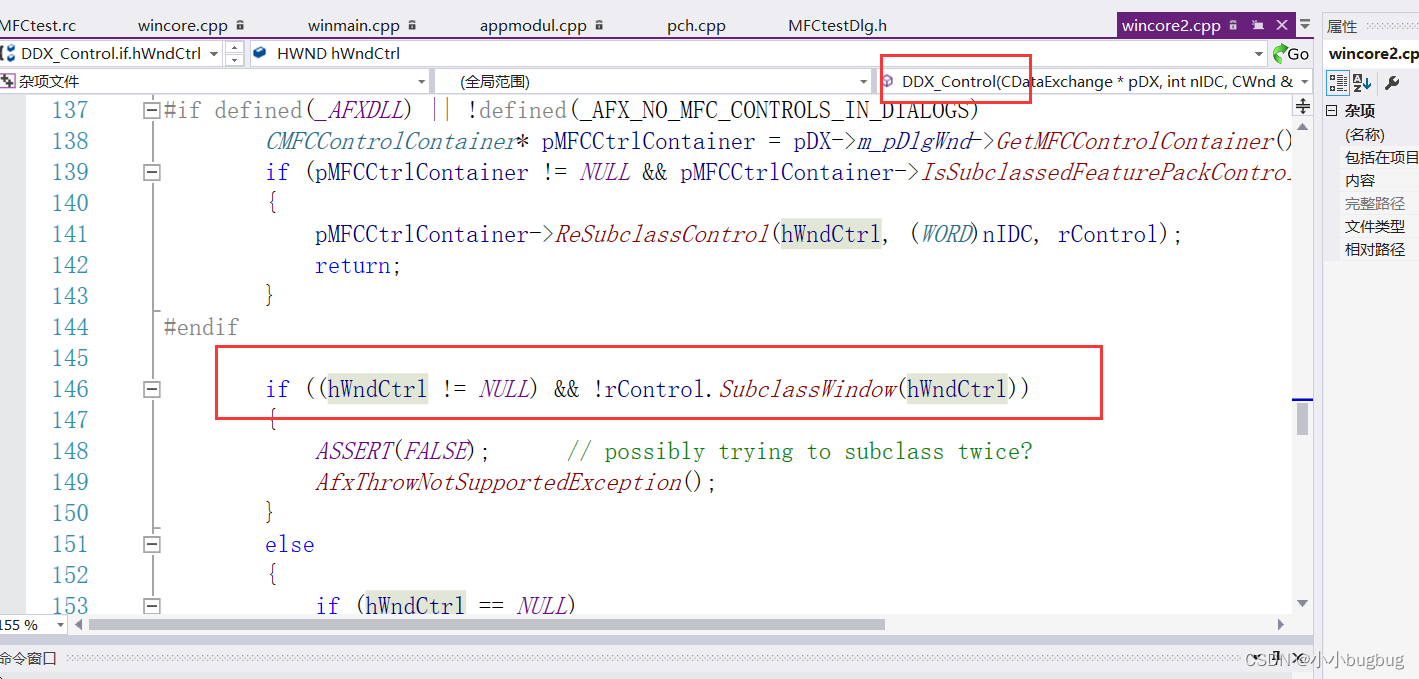
从MFC初始化过程看rc文件的行为,并剖析关联控件变量的实质
以MFC对话框程序为例: 当我们打开资源编辑器时就可以很容易的添加各种控件窗口,资源编辑器实际上操作的是rc文件;那么这些控件窗口是何时被MFC创建与管理的
没有关联控件变量前,在资源编辑器中依然可以容易拖动控件,并显示出来;这个控件窗口是如何被创建和管理的: 资源编…
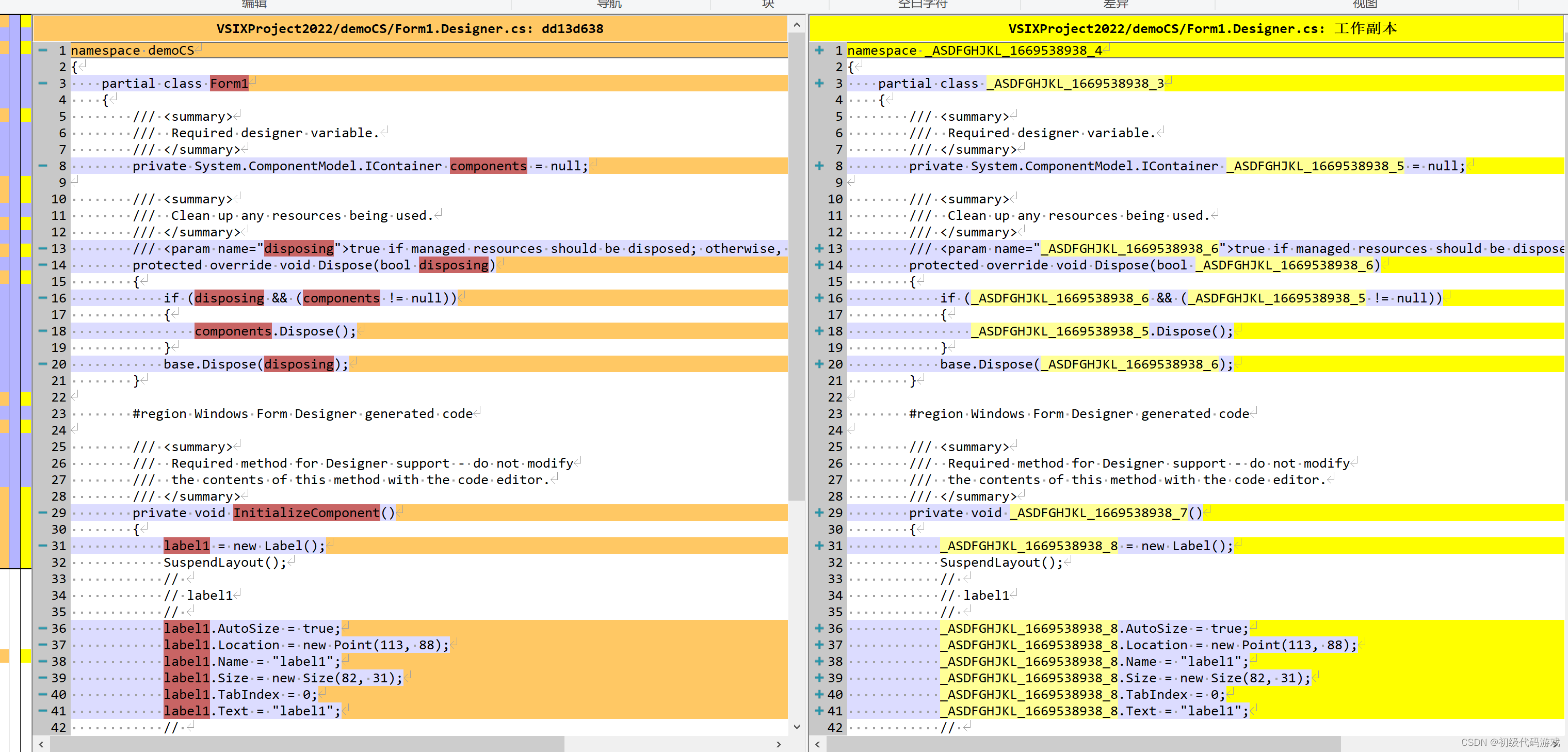
VSIX:C#项目 重命名所有标识符(Visual Studio扩展开发)
出于某种目的(合法的,真的合法的,合同上明确指出可以这样做),我准备了一个重命名所有标识符的VS扩展,用来把一个C#库改头换面,在简单的测试项目上工作很满意,所有标识符都被准确替换…
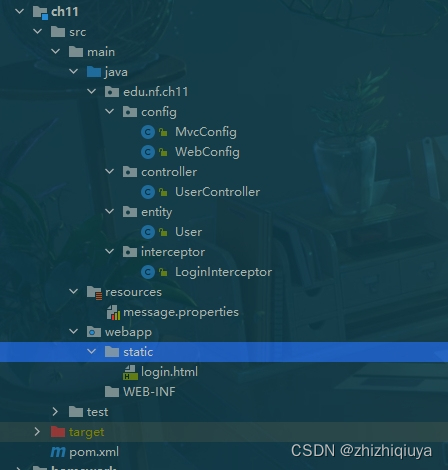
SpringMVC Day 11 : 零 xml 配置
前言
欢迎来到《Spring MVC Day 11: 零XML配置》!在之前的学习中,我们已经掌握了如何使用Spring MVC框架构建灵活、高效的Web应用程序。然而,我们可能还记得那些繁琐的XML配置文件,它们是我们在过去几天中使用的方式。
好消息是…
最新文章
- 深圳公众号制作/东莞seo计费
- wordpress菜单调用标签/seo推广培训
- 网站开发实用技术 代码/怎么在百度做宣传广告
- wordpress批量移动产品/北京推广服务
- 重庆彭水网站建设/百度竞价关键词怎么优化
- thinkphp5来做网站吗/线上营销工具
- java全栈day20--Web后端实战(Mybatis基础2)
- 微服务——技术选型与框架
- G口带宽服务器与1G独享带宽服务器:深度剖析其差异
- (通信)海洋波导(Ocean Acoustic Waveguide)
- 2023年厦门市第30届小学生C++信息学竞赛复赛上机操作题(三、2023C. 太空旅行(travel))
- note40:应用开发规范
推荐文章
- MyBatis友人帐之基础入门
- # 音频处理4_傅里叶变换
- #### golang中【堆】的使用及底层 ####
- #41 AI-002-十分钟理解ChatGPT的技术逻辑及演进(前世 、今生)
- #444到1092
- #HarmonyOS:@State--@Prop--@Link--@Provide/@Consume--@Observed等
- #倍增 #国旗计划
- (2024)docker-compose实战 (8)部署LAMP项目(最终版)
- (Askchat.ai、ChatAI、智友AI、AI写作生成器助手、在线AI助手)分享好用的ChatGPT
- (C)一些基础题13
- (C++)成绩排序
- (C23/C++23) 语句末尾的标签