VanillaNet简介
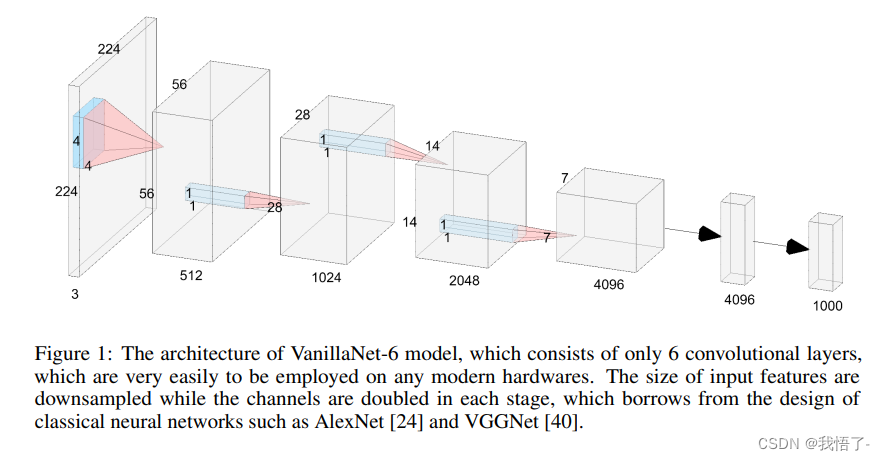
简介:VanillaNet是一种在设计中融入优雅的神经网络架构,通过避免高深度,shortcut和自注意力等复杂操作,VanillaNet简单而强大。每一层都经过精心制作,紧凑而直接,在训练后对非线性激活函数进行修剪以恢复原始框架。VanillaNet克服了固有复杂性的挑战,使其成为资源受限环境的理想选择。其易于理解且高度简化的体系结构为高效部署开辟了新的可能性。大量实验表明,VanillaNet的性能和著名的深度神经网络和Transformer不相上下,展示了极简主义在深度学习中的力量。VanillaNet这一工作重新定义了landscape和挑战基础模型现状的巨大潜力,为优雅有效的模型设计开辟了一条新的道路。
VanillaNet代码实现
#Copyright (C) 2023. Huawei Technologies Co., Ltd. All rights reserved.#This program is free software; you can redistribute it and/or modify it under the terms of the MIT License.#This program is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the MIT License for more details.import torch
import torch.nn as nn
import torch.nn.functional as F
from timm.models.layers import weight_init, DropPath
import numpy as np__all__ = ['vanillanet_5', 'vanillanet_6', 'vanillanet_7', 'vanillanet_8', 'vanillanet_9', 'vanillanet_10', 'vanillanet_11', 'vanillanet_12', 'vanillanet_13', 'vanillanet_13_x1_5', 'vanillanet_13_x1_5_ada_pool']class activation(nn.ReLU):def __init__(self, dim, act_num=3, deploy=False):super(activation, self).__init__()self.deploy = deployself.weight = torch.nn.Parameter(torch.randn(dim, 1, act_num*2 + 1, act_num*2 + 1))self.bias = Noneself.bn = nn.BatchNorm2d(dim, eps=1e-6)self.dim = dimself.act_num = act_numweight_init.trunc_normal_(self.weight, std=.02)def forward(self, x):if self.deploy:return torch.nn.functional.conv2d(super(activation, self).forward(x), self.weight, self.bias, padding=(self.act_num*2 + 1)//2, groups=self.dim)else:return self.bn(torch.nn.functional.conv2d(super(activation, self).forward(x),self.weight, padding=self.act_num, groups=self.dim))def _fuse_bn_tensor(self, weight, bn):kernel = weightrunning_mean = bn.running_meanrunning_var = bn.running_vargamma = bn.weightbeta = bn.biaseps = bn.epsstd = (running_var + eps).sqrt()t = (gamma / std).reshape(-1, 1, 1, 1)return kernel * t, beta + (0 - running_mean) * gamma / stddef switch_to_deploy(self):if not self.deploy:kernel, bias = self._fuse_bn_tensor(self.weight, self.bn)self.weight.data = kernelself.bias = torch.nn.Parameter(torch.zeros(self.dim))self.bias.data = biasself.__delattr__('bn')self.deploy = Trueclass Block(nn.Module):def __init__(self, dim, dim_out, act_num=3, stride=2, deploy=False, ada_pool=None):super().__init__()self.act_learn = 1self.deploy = deployif self.deploy:self.conv = nn.Conv2d(dim, dim_out, kernel_size=1)else:self.conv1 = nn.Sequential(nn.Conv2d(dim, dim, kernel_size=1),nn.BatchNorm2d(dim, eps=1e-6),)self.conv2 = nn.Sequential(nn.Conv2d(dim, dim_out, kernel_size=1),nn.BatchNorm2d(dim_out, eps=1e-6))if not ada_pool:self.pool = nn.Identity() if stride == 1 else nn.MaxPool2d(stride)else:self.pool = nn.Identity() if stride == 1 else nn.AdaptiveMaxPool2d((ada_pool, ada_pool))self.act = activation(dim_out, act_num)def forward(self, x):if self.deploy:x = self.conv(x)else:x = self.conv1(x)x = torch.nn.functional.leaky_relu(x,self.act_learn)x = self.conv2(x)x = self.pool(x)x = self.act(x)return xdef _fuse_bn_tensor(self, conv, bn):kernel = conv.weightbias = conv.biasrunning_mean = bn.running_meanrunning_var = bn.running_vargamma = bn.weightbeta = bn.biaseps = bn.epsstd = (running_var + eps).sqrt()t = (gamma / std).reshape(-1, 1, 1, 1)return kernel * t, beta + (bias - running_mean) * gamma / stddef switch_to_deploy(self):if not self.deploy:kernel, bias = self._fuse_bn_tensor(self.conv1[0], self.conv1[1])self.conv1[0].weight.data = kernelself.conv1[0].bias.data = bias# kernel, bias = self.conv2[0].weight.data, self.conv2[0].bias.datakernel, bias = self._fuse_bn_tensor(self.conv2[0], self.conv2[1])self.conv = self.conv2[0]self.conv.weight.data = torch.matmul(kernel.transpose(1,3), self.conv1[0].weight.data.squeeze(3).squeeze(2)).transpose(1,3)self.conv.bias.data = bias + (self.conv1[0].bias.data.view(1,-1,1,1)*kernel).sum(3).sum(2).sum(1)self.__delattr__('conv1')self.__delattr__('conv2')self.act.switch_to_deploy()self.deploy = Trueclass VanillaNet(nn.Module):def __init__(self, in_chans=3, num_classes=1000, dims=[96, 192, 384, 768], drop_rate=0, act_num=3, strides=[2,2,2,1], deploy=False, ada_pool=None, **kwargs):super().__init__()self.deploy = deployif self.deploy:self.stem = nn.Sequential(nn.Conv2d(in_chans, dims[0], kernel_size=4, stride=4),activation(dims[0], act_num))else:self.stem1 = nn.Sequential(nn.Conv2d(in_chans, dims[0], kernel_size=4, stride=4),nn.BatchNorm2d(dims[0], eps=1e-6),)self.stem2 = nn.Sequential(nn.Conv2d(dims[0], dims[0], kernel_size=1, stride=1),nn.BatchNorm2d(dims[0], eps=1e-6),activation(dims[0], act_num))self.act_learn = 1self.stages = nn.ModuleList()for i in range(len(strides)):if not ada_pool:stage = Block(dim=dims[i], dim_out=dims[i+1], act_num=act_num, stride=strides[i], deploy=deploy)else:stage = Block(dim=dims[i], dim_out=dims[i+1], act_num=act_num, stride=strides[i], deploy=deploy, ada_pool=ada_pool[i])self.stages.append(stage)self.depth = len(strides)self.apply(self._init_weights)self.channel = [i.size(1) for i in self.forward(torch.randn(1, 3, 640, 640))]def _init_weights(self, m):if isinstance(m, (nn.Conv2d, nn.Linear)):weight_init.trunc_normal_(m.weight, std=.02)nn.init.constant_(m.bias, 0)def change_act(self, m):for i in range(self.depth):self.stages[i].act_learn = mself.act_learn = mdef forward(self, x):input_size = x.size(2)scale = [4, 8, 16, 32]features = [None, None, None, None]if self.deploy:x = self.stem(x)else:x = self.stem1(x)x = torch.nn.functional.leaky_relu(x,self.act_learn)x = self.stem2(x)if input_size // x.size(2) in scale:features[scale.index(input_size // x.size(2))] = xfor i in range(self.depth):x = self.stages[i](x)if input_size // x.size(2) in scale:features[scale.index(input_size // x.size(2))] = xreturn featuresdef _fuse_bn_tensor(self, conv, bn):kernel = conv.weightbias = conv.biasrunning_mean = bn.running_meanrunning_var = bn.running_vargamma = bn.weightbeta = bn.biaseps = bn.epsstd = (running_var + eps).sqrt()t = (gamma / std).reshape(-1, 1, 1, 1)return kernel * t, beta + (bias - running_mean) * gamma / stddef switch_to_deploy(self):if not self.deploy:self.stem2[2].switch_to_deploy()kernel, bias = self._fuse_bn_tensor(self.stem1[0], self.stem1[1])self.stem1[0].weight.data = kernelself.stem1[0].bias.data = biaskernel, bias = self._fuse_bn_tensor(self.stem2[0], self.stem2[1])self.stem1[0].weight.data = torch.einsum('oi,icjk->ocjk', kernel.squeeze(3).squeeze(2), self.stem1[0].weight.data)self.stem1[0].bias.data = bias + (self.stem1[0].bias.data.view(1,-1,1,1)*kernel).sum(3).sum(2).sum(1)self.stem = torch.nn.Sequential(*[self.stem1[0], self.stem2[2]])self.__delattr__('stem1')self.__delattr__('stem2')for i in range(self.depth):self.stages[i].switch_to_deploy()self.deploy = Truedef update_weight(model_dict, weight_dict):idx, temp_dict = 0, {}for k, v in weight_dict.items():if k in model_dict.keys() and np.shape(model_dict[k]) == np.shape(v):temp_dict[k] = vidx += 1model_dict.update(temp_dict)print(f'loading weights... {idx}/{len(model_dict)} items')return model_dictdef vanillanet_5(pretrained='',in_22k=False, **kwargs):model = VanillaNet(dims=[128*4, 256*4, 512*4, 1024*4], strides=[2,2,2], **kwargs)if pretrained:weights = torch.load(pretrained)['model_ema']model.load_state_dict(update_weight(model.state_dict(), weights))return modeldef vanillanet_6(pretrained='',in_22k=False, **kwargs):model = VanillaNet(dims=[128*4, 256*4, 512*4, 1024*4, 1024*4], strides=[2,2,2,1], **kwargs)if pretrained:weights = torch.load(pretrained)['model_ema']model.load_state_dict(update_weight(model.state_dict(), weights))return modeldef vanillanet_7(pretrained='',in_22k=False, **kwargs):model = VanillaNet(dims=[128*4, 128*4, 256*4, 512*4, 1024*4, 1024*4], strides=[1,2,2,2,1], **kwargs)if pretrained:weights = torch.load(pretrained)['model_ema']model.load_state_dict(update_weight(model.state_dict(), weights))return modeldef vanillanet_8(pretrained='', in_22k=False, **kwargs):model = VanillaNet(dims=[128*4, 128*4, 256*4, 512*4, 512*4, 1024*4, 1024*4], strides=[1,2,2,1,2,1], **kwargs)if pretrained:weights = torch.load(pretrained)['model_ema']model.load_state_dict(update_weight(model.state_dict(), weights))return modeldef vanillanet_9(pretrained='', in_22k=False, **kwargs):model = VanillaNet(dims=[128*4, 128*4, 256*4, 512*4, 512*4, 512*4, 1024*4, 1024*4], strides=[1,2,2,1,1,2,1], **kwargs)if pretrained:weights = torch.load(pretrained)['model_ema']model.load_state_dict(update_weight(model.state_dict(), weights))return modeldef vanillanet_10(pretrained='', in_22k=False, **kwargs):model = VanillaNet(dims=[128*4, 128*4, 256*4, 512*4, 512*4, 512*4, 512*4, 1024*4, 1024*4],strides=[1,2,2,1,1,1,2,1],**kwargs)if pretrained:weights = torch.load(pretrained)['model_ema']model.load_state_dict(update_weight(model.state_dict(), weights))return modeldef vanillanet_11(pretrained='', in_22k=False, **kwargs):model = VanillaNet(dims=[128*4, 128*4, 256*4, 512*4, 512*4, 512*4, 512*4, 512*4, 1024*4, 1024*4],strides=[1,2,2,1,1,1,1,2,1],**kwargs)if pretrained:weights = torch.load(pretrained)['model_ema']model.load_state_dict(update_weight(model.state_dict(), weights))return modeldef vanillanet_12(pretrained='', in_22k=False, **kwargs):model = VanillaNet(dims=[128*4, 128*4, 256*4, 512*4, 512*4, 512*4, 512*4, 512*4, 512*4, 1024*4, 1024*4],strides=[1,2,2,1,1,1,1,1,2,1],**kwargs)if pretrained:weights = torch.load(pretrained)['model_ema']model.load_state_dict(update_weight(model.state_dict(), weights))return modeldef vanillanet_13(pretrained='', in_22k=False, **kwargs):model = VanillaNet(dims=[128*4, 128*4, 256*4, 512*4, 512*4, 512*4, 512*4, 512*4, 512*4, 512*4, 1024*4, 1024*4],strides=[1,2,2,1,1,1,1,1,1,2,1],**kwargs)if pretrained:weights = torch.load(pretrained)['model_ema']model.load_state_dict(update_weight(model.state_dict(), weights))return modeldef vanillanet_13_x1_5(pretrained='', in_22k=False, **kwargs):model = VanillaNet(dims=[128*6, 128*6, 256*6, 512*6, 512*6, 512*6, 512*6, 512*6, 512*6, 512*6, 1024*6, 1024*6],strides=[1,2,2,1,1,1,1,1,1,2,1],**kwargs)if pretrained:weights = torch.load(pretrained)['model_ema']model.load_state_dict(update_weight(model.state_dict(), weights))return modeldef vanillanet_13_x1_5_ada_pool(pretrained='', in_22k=False, **kwargs):model = VanillaNet(dims=[128*6, 128*6, 256*6, 512*6, 512*6, 512*6, 512*6, 512*6, 512*6, 512*6, 1024*6, 1024*6],strides=[1,2,2,1,1,1,1,1,1,2,1],ada_pool=[0,40,20,0,0,0,0,0,0,10,0],**kwargs)if pretrained:weights = torch.load(pretrained)['model_ema']model.load_state_dict(update_weight(model.state_dict(), weights))return modelif __name__ == '__main__':inputs = torch.randn((1, 3, 640, 640))model = vanillanet_10()# weights = torch.load('vanillanet_5.pth')['model_ema']# model.load_state_dict(update_weight(model.state_dict(), weights))pred = model(inputs)for i in pred:print(i.size())
Backbone替换
yolo.py修改
def parse_model函数
def parse_model(d, ch): # model_dict, input_channels(3)# Parse a YOLOv5 model.yaml dictionaryLOGGER.info(f"\n{'':>3}{'from':>18}{'n':>3}{'params':>10} {'module':<40}{'arguments':<30}")anchors, nc, gd, gw, act = d['anchors'], d['nc'], d['depth_multiple'], d['width_multiple'], d.get('activation')if act:Conv.default_act = eval(act) # redefine default activation, i.e. Conv.default_act = nn.SiLU()LOGGER.info(f"{colorstr('activation:')} {act}") # printna = (len(anchors[0]) // 2) if isinstance(anchors, list) else anchors # number of anchorsno = na * (nc + 5) # number of outputs = anchors * (classes + 5)is_backbone = Falselayers, save, c2 = [], [], ch[-1] # layers, savelist, ch outfor i, (f, n, m, args) in enumerate(d['backbone'] + d['head']): # from, number, module, argstry:t = mm = eval(m) if isinstance(m, str) else m # eval stringsexcept:passfor j, a in enumerate(args):with contextlib.suppress(NameError):try:args[j] = eval(a) if isinstance(a, str) else a # eval stringsexcept:args[j] = an = n_ = max(round(n * gd), 1) if n > 1 else n # depth gainif m in {Conv, GhostConv, Bottleneck, GhostBottleneck, SPP, SPPF, DWConv, MixConv2d, Focus, CrossConv,BottleneckCSP, C3, C3TR, C3SPP, C3Ghost, nn.ConvTranspose2d, DWConvTranspose2d, C3x}:c1, c2 = ch[f], args[0]if c2 != no: # if not outputc2 = make_divisible(c2 * gw, 8)args = [c1, c2, *args[1:]]if m in {BottleneckCSP, C3, C3TR, C3Ghost, C3x}:args.insert(2, n) # number of repeatsn = 1elif m is nn.BatchNorm2d:args = [ch[f]]elif m is Concat:c2 = sum(ch[x] for x in f)# TODO: channel, gw, gdelif m in {Detect, Segment}:args.append([ch[x] for x in f])if isinstance(args[1], int): # number of anchorsargs[1] = [list(range(args[1] * 2))] * len(f)if m is Segment:args[3] = make_divisible(args[3] * gw, 8)elif m is Contract:c2 = ch[f] * args[0] ** 2elif m is Expand:c2 = ch[f] // args[0] ** 2elif isinstance(m, str):t = mm = timm.create_model(m, pretrained=args[0], features_only=True)c2 = m.feature_info.channels()elif m in {vanillanet_5, vanillanet_6}: #添加Backbonem = m(*args)c2 = m.channelelse:c2 = ch[f]if isinstance(c2, list):is_backbone = Truem_ = mm_.backbone = Trueelse:m_ = nn.Sequential(*(m(*args) for _ in range(n))) if n > 1 else m(*args) # modulet = str(m)[8:-2].replace('__main__.', '') # module typenp = sum(x.numel() for x in m_.parameters()) # number paramsm_.i, m_.f, m_.type, m_.np = i + 4 if is_backbone else i, f, t, np # attach index, 'from' index, type, number paramsLOGGER.info(f'{i:>3}{str(f):>18}{n_:>3}{np:10.0f} {t:<40}{str(args):<30}') # printsave.extend(x % (i + 4 if is_backbone else i) for x in ([f] if isinstance(f, int) else f) if x != -1) # append to savelistlayers.append(m_)if i == 0:ch = []if isinstance(c2, list):ch.extend(c2)for _ in range(5 - len(ch)):ch.insert(0, 0)else:ch.append(c2)return nn.Sequential(*layers), sorted(save)
def _forward_once函数
def _forward_once(self, x, profile=False, visualize=False):y, dt = [], [] # outputsfor m in self.model:if m.f != -1: # if not from previous layerx = y[m.f] if isinstance(m.f, int) else [x if j == -1 else y[j] for j in m.f] # from earlier layersif profile:self._profile_one_layer(m, x, dt)if hasattr(m, 'backbone'):x = m(x)for _ in range(5 - len(x)):x.insert(0, None)for i_idx, i in enumerate(x):if i_idx in self.save:y.append(i)else:y.append(None)x = x[-1]else:x = m(x) # runy.append(x if m.i in self.save else None) # save outputif visualize:feature_visualization(x, m.type, m.i, save_dir=visualize)return x创建.yaml配置文件
# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
# Parameters
nc: 80 # number of classes
depth_multiple: 0.33 # model depth multiple
width_multiple: 0.25 # layer channel multiple
anchors:- [10,13, 16,30, 33,23] # P3/8- [30,61, 62,45, 59,119] # P4/16- [116,90, 156,198, 373,326] # P5/32# 0-P1/2
# 1-P2/4
# 2-P3/8
# 3-P4/16
# 4-P5/32# YOLOv5 v6.0 backbone
backbone:# [from, number, module, args][[-1, 1, vanillanet_5, [False]], # 4[-1, 1, SPPF, [1024, 5]], # 5]# YOLOv5 v6.0 head
head:[[-1, 1, Conv, [512, 1, 1]], # 6[-1, 1, nn.Upsample, [None, 2, 'nearest']], # 7[[-1, 3], 1, Concat, [1]], # cat backbone P4 8[-1, 3, C3, [512, False]], # 9[-1, 1, Conv, [256, 1, 1]], # 10[-1, 1, nn.Upsample, [None, 2, 'nearest']], # 11[[-1, 2], 1, Concat, [1]], # cat backbone P3 12[-1, 3, C3, [256, False]], # 13 (P3/8-small)[-1, 1, Conv, [256, 3, 2]], # 14[[-1, 10], 1, Concat, [1]], # cat head P4 15[-1, 3, C3, [512, False]], # 16 (P4/16-medium)[-1, 1, Conv, [512, 3, 2]], # 17[[-1, 5], 1, Concat, [1]], # cat head P5 18[-1, 3, C3, [1024, False]], # 19 (P5/32-large)[[13, 16, 19], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)]






![[量化投资-学习笔记009]Python+TDengine从零开始搭建量化分析平台-KDJ](https://img-blog.csdnimg.cn/b3e33794423a4d36a07800969dcdd997.png#pic_center)