目录
一、题目
二、解决方法
三、改进

一、题目
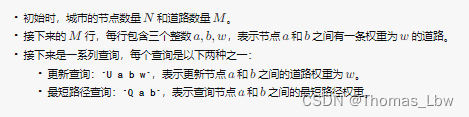
背景: 在一个城市中,有数个交通节点,每个节点间有双向道路相连。每条道路具有一个初始权重,代表通行该路段的成本(例如时间、费用等)。随着时间的变化,道路的权重可能会发生变化,比如由于交通堵塞或道路维修。
问题: 设计一个算法,以处理以下两种类型的查询:
- 更新查询:给定两个节点及新的权重值,更新这两个节点之间道路的权重。
- 最短路径查询:给定两个节点,找出这两个节点之间的最短路径及其权重。
输入格式:
输出格式:
- 对于每个最短路径查询,输出一个整数,表示最短路径的权重。如果两个节点之间没有路径,则输出
-1。
实际应用: 这个问题可以应用于交通管理系统,例如实时更新交通状况并为司机提供最优路线。也适用于网络数据流量管理,其中节点代表数据中心,道路代表连接它们的网络。
挑战:
- 设计一个高效的数据结构来存储和更新节点间的道路权重。
- 实现一个算法来快速回答最短路径查询,考虑到道路权重可能频繁变化。
二、解决方法
解决:
为了解决这个动态路径分析问题,我们可以采用以下策略:
- 数据结构:使用邻接表来表示图,其中每个节点都有一个列表存储它与其他节点的连接及其权重。
- 路径更新:对于更新操作,我们只需要修改邻接表中对应的权重。
- 最短路径查询:使用 Dijkstra 算法来找到最短路径。由于权重可能会频繁变化,我们在每次查询时都从头开始执行 Dijkstra 算法。
C++实现:
#include <iostream>
#include <vector>
#include <queue>
#include <climits>using namespace std;typedef pair<int, int> pii; // pair of (weight, node)class Graph {int V; // Number of verticesvector<vector<pii>> adj; // Adjacency listpublic:Graph(int V) : V(V), adj(V) {}void addEdge(int u, int v, int w) {adj[u].push_back({w, v});adj[v].push_back({w, u}); // For undirected graph}void updateEdge(int u, int v, int w) {// Update weight for edge u-vfor (auto &p : adj[u]) {if (p.second == v) {p.first = w;break;}}for (auto &p : adj[v]) {if (p.second == u) {p.first = w;break;}}}int shortestPath(int source, int destination) {priority_queue<pii, vector<pii>, greater<pii>> pq;vector<int> dist(V, INT_MAX);pq.push({0, source});dist[source] = 0;while (!pq.empty()) {int u = pq.top().second;pq.pop();for (auto &[w, v] : adj[u]) {if (dist[v] > dist[u] + w) {dist[v] = dist[u] + w;pq.push({dist[v], v});}}}return (dist[destination] == INT_MAX) ? -1 : dist[destination];}
};int main() {int N, M, u, v, w;cin >> N >> M;Graph g(N);for (int i = 0; i < M; ++i) {cin >> u >> v >> w;g.addEdge(u, v, w);}// Querieschar queryType;while (cin >> queryType) {if (queryType == 'U') {cin >> u >> v >> w;g.updateEdge(u, v, w);} else if (queryType == 'Q') {cin >> u >> v;cout << g.shortestPath(u, v) << endl;}}return 0;
}
Python:
import heapqclass Graph:def __init__(self, V):self.V = Vself.graph = {i: {} for i in range(V)}def add_edge(self, u, v, w):self.graph[u][v] = wself.graph[v][u] = wdef update_edge(self, u, v, w):if v in self.graph[u]:self.graph[u][v] = wif u in self.graph[v]:self.graph[v][u] = wdef shortest_path(self, source, destination):dist = [float('inf')] * self.Vdist[source] = 0pq = [(0, source)]while pq:d, u = heapq.heappop(pq)if d > dist[u]:continuefor v, w in self.graph[u].items():if dist[u] + w < dist[v]:dist[v] = dist[u] + wheapq.heappush(pq, (dist[v], v))return dist[destination] if dist[destination] != float('inf') else -1# Example usage
g = Graph(N) # N is the number of vertices
# Add edges and handle queries similarly to the C++ example
JAVA:
import java.util.*;public class Graph {private int V;private Map<Integer, Map<Integer, Integer>> adj;public Graph(int V) {this.V = V;this.adj = new HashMap<>();for (int i = 0; i < V; i++) {adj.put(i, new HashMap<>());}}public void addEdge(int u, int v, int w) {adj.get(u).put(v, w);adj.get(v).put(u, w);}public void updateEdge(int u, int v, int w) {if (adj.get(u).containsKey(v)) {adj.get(u).put(v, w);}if (adj.get(v).containsKey(u)) {adj.get(v).put(u, w);}}public int shortestPath(int source, int destination) {int[] dist = new int[V];Arrays.fill(dist, Integer.MAX_VALUE);dist[source] = 0;PriorityQueue<int[]> pq = new PriorityQueue<>(Comparator.comparingInt(a -> a[1]));pq.add(new int[]{source, 0});while (!pq.isEmpty()) {int[] current = pq.poll();int u = current[0];if (u == destination) {break;}for (Map.Entry<Integer, Integer> entry : adj.get(u).entrySet()) {int v = entry.getKey();int weight = entry.getValue();if (dist[u] + weight < dist[v]) {dist[v] = dist[u] + weight;pq.add(new int[]{v, dist[v]});}}}return dist[destination] == Integer.MAX_VALUE ? -1 : dist[destination];}// Example usagepublic static void main(String[] args) {Graph g = new Graph(N); // N is the number of vertices// Add edges and handle queries similarly to the C++ example}
}
Go语言:
package mainimport ("container/heap""fmt""math"
)type Edge struct {node, weight int
}type Graph struct {V intedges map[int]map[int]int
}func NewGraph(V int) *Graph {g := &Graph{V: V,edges: make(map[int]map[int]int),}for i := 0; i < V; i++ {g.edges[i] = make(map[int]int)}return g
}
func (g *Graph) UpdateEdge(u, v, w int) {if _, ok := g.edges[u][v]; ok {g.edges[u][v] = w}if _, ok := g.edges[v][u]; ok {g.edges[v][u] = w}
}func (g *Graph) ShortestPath(source, destination int) int {dist := make([]int, g.V)for i := range dist {dist[i] = math.MaxInt32}dist[source] = 0pq := make(PriorityQueue, 0)heap.Init(&pq)heap.Push(&pq, &Item{value: source,priority: 0,})for pq.Len() > 0 {item := heap.Pop(&pq).(*Item)u := item.valueif u == destination {break}for v, w := range g.edges[u] {if dist[u]+w < dist[v] {dist[v] = dist[u] + wheap.Push(&pq, &Item{value: v,priority: dist[v],})}}}if dist[destination] == math.MaxInt32 {return -1}return dist[destination]
}// Define the priority queue used for Dijkstra's algorithm
type Item struct {value int // The node indexpriority int // The node's priority (distance)index int // The index of the item in the heap
}type PriorityQueue []*Itemfunc (pq PriorityQueue) Len() int { return len(pq) }func (pq PriorityQueue) Less(i, j int) bool {return pq[i].priority < pq[j].priority
}func (pq PriorityQueue) Swap(i, j int) {pq[i], pq[j] = pq[j], pq[i]pq[i].index = ipq[j].index = j
}func (pq *PriorityQueue) Push(x interface{}) {n := len(*pq)item := x.(*Item)item.index = n*pq = append(*pq, item)
}func (pq *PriorityQueue) Pop() interface{} {old := *pqn := len(old)item := old[n-1]old[n-1] = nilitem.index = -1*pq = old[0 : n-1]return item
}func main() {// Example usageg := NewGraph(N) // N is the number of vertices// Add edges and handle queries similarly to the C++ example
}
三、改进
- 效率问题:每次查询最短路径时都需要从头执行 Dijkstra 算法。在频繁更新边权重的场景中,这可能导致效率低下。
- 数据结构选择:现有实现使用邻接表来存储图,这对于稀疏图是合适的。但对于密集图,这种表示方式可能导致内存使用不经济。
改进:
- 增量更新算法:对于频繁更新的场景,可以考虑使用更高级的图算法,如“动态最短路径算法”。这类算法可以在不重新计算整个图的情况下,有效更新最短路径。
- 数据结构优化:针对不同类型的图(稀疏或密集),选择合适的数据结构。例如,对于密集图,可以使用邻接矩阵来代替邻接表。
#include <iostream>
#include <vector>
#include <queue>
#include <climits>using namespace std;const int MAX_V = 1000; // 假设图中最多有1000个节点class Graph {int V; // 顶点数vector<vector<int>> adjMatrix; // 邻接矩阵public:Graph(int V) : V(V), adjMatrix(V, vector<int>(V, INT_MAX)) {}void addEdge(int u, int v, int w) {adjMatrix[u][v] = w;adjMatrix[v][u] = w;}void updateEdge(int u, int v, int w) {adjMatrix[u][v] = w;adjMatrix[v][u] = w;}int shortestPath(int source, int destination) {vector<int> dist(V, INT_MAX);vector<bool> sptSet(V, false);dist[source] = 0;for (int count = 0; count < V - 1; count++) {int u = minDistance(dist, sptSet);sptSet[u] = true;for (int v = 0; v < V; v++) {if (!sptSet[v] && adjMatrix[u][v] != INT_MAX && dist[u] != INT_MAX &&dist[u] + adjMatrix[u][v] < dist[v]) {dist[v] = dist[u] + adjMatrix[u][v];}}}return (dist[destination] == INT_MAX) ? -1 : dist[destination];}private:int minDistance(const vector<int> &dist, const vector<bool> &sptSet) {int min = INT_MAX, min_index;for (int v = 0; v < V; v++) {if (!sptSet[v] && dist[v] <= min) {min = dist[v];min_index = v;}}return min_index;}
};int main() {// 示例用法int N, M, u, v, w;cin >> N >> M;Graph g(N);for (int i = 0; i < M; ++i) {cin >> u >> v >> w;g.addEdge(u, v, w);}// 处理查询// ...
}
这个实现针对密集图进行了优化,但它不包括动态最短路径算法的实现。动态最短路径算法通常更复杂,可能需要使用更高级的数据结构和算法技巧。这种算法的实现和优化通常是图算法研究的前沿话题。