作者 | 张祥威
编辑 | 德新

2023年尾上市的这一批车型中,以问界新M7、理想MEGA、小鹏X9、智界S7和极氪007最为典型,它们的头顶大多搭载了一颗激光雷达,有的车型比如小鹏X9,甚至在前大灯位置配置了两颗激光雷达。
这是为实现高阶智能驾驶功能而来。
对于高阶智驾方案而言,激光雷达俨然已成为必备品,其天生具备探测距离远、光线适应性好等特点,而且对视场角范围内的异型目标物进行准确感知。
相比特斯拉的纯视觉方案,车企引入激光雷达,不仅会减少一定的算法开发压力,还能减少更多的隐形成本支出,在感知算法层面加速超车纯视觉方案,尽快实现高阶智驾。
这是一场关乎技术路线、规模成本的竞赛,一些车企已经开始用脚投票。
一、绑定高阶智驾版,激光雷达出货量陡升
激光雷达发射激光脉冲,遇到目标物后折返,通过计算激光的折返时间,就可以计算出与目标物体的相对距离。相比摄像头、毫米波雷达等其他传感器,激光雷达对于夜间、光照不好的场景下的感知能力都要更好。
2021年之前,量产搭载激光雷达的车型远不像今天这样丰富。
2021年,车企开始真正量产交付激光雷达车型,这年打着「全球首款量产激光雷达车型」旗帜上市的小鹏P5,为后来者冲出一条路。
自小鹏P5起,搭载激光雷达的车型更多涌现。
今天,上至100万元出头的高端品牌仰望,下至20多万元的一众国产电动品牌,各自车型的高阶智驾版本中,激光雷达已经成为必选。
激光雷达产品主要见于顶配版本车型上,主流方案会采用一颗、两颗配置,少数玩家如阿维塔,采用的是三颗激光雷达。
激光雷达公司的出货速度,随着高阶智驾版的畅销,陡然提升。
2021年,国内头部激光雷达公司的出货量刚刚到达1万台左右的水平。进入2022年,禾赛出货量8万台,排在后面的图达通等,出货量也达到了5万多台的规模。
今年前三季度,禾赛的激光雷达总交付量为134,380台,同比增长307.9%。其中,ADAS激光雷达交付量达114,482台,同比增长516.6%,已率先突破年交付10万台大关。

接下来的两年,头部激光雷达公司将会向着年出货50万台的节点迈进。
激光雷达上车过程中,纯视觉玩家也在持续前进。
纯视觉指的是,主要依赖摄像头传感器来实现对周边环境对感知,尽可能减少对激光雷达、毫米波雷达、高精地图等辅助工具的依赖。
特斯拉是纯视觉的鼻祖,到今天一直坚持不用激光雷达,而是通过摄像头传感器来实现对周边环境的感知。
特斯拉的坚持,让激光雷达与纯视觉的对战充满变数。毕竟,头部玩家在实现城市NOA时,已经着手「去高精地图」、「去毫米波雷达」,借助「BEV+Tranformer+Occupancy」来实现道路拓扑、通用障碍物的识别等任务。
在算法提升以及降本压力加大的背景下,如何看待激光雷达方案,是不少人关心的话题。
二、车企实现高阶智驾的「秘密武器」
从特斯拉身上,可以看到自动驾驶算法的演进脉络。
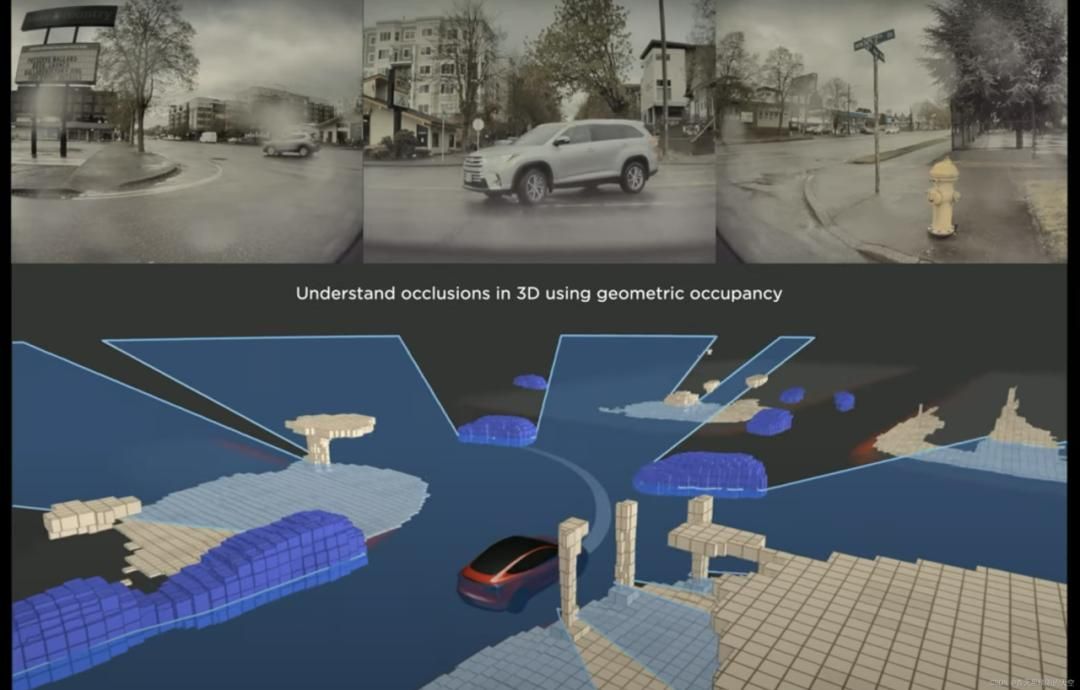
特斯拉最初采用的是2D检测,之后进化至BEV算法,为了解决异型障碍物的问题,又进一步演化出Occupancy占用网络算法。
Occupancy是通过实时推理,来对一些难以直接表征的环境信息进行灵活探测,比如对高速道路上的道路施工场景、异型车辆,以及行人、动物的位置、速度等进行探测。
本质上,Occupancy属于三维重建,其中涉及复杂的算法,包括:
- 提取2D视觉特征;
- 2D特征转为3D特征;
- 时序对齐,多帧融合构建4D网络;
- 解码生成3D结构和目标物速度;
但眼下的问题在于,纯视觉方案需要不断获取海量数据,从而实现对现实世界的识别和三维重构。如果缺少足够多的数据,就会造成漏检、误检。特斯拉每年在全球范围内卖出100多万台车,这些车辆在路上行驶过程中源源不断的回传测试数据,Autopilot累积使用里程已经超过90亿英里。目前没有任何一个其他纯视觉玩家有这么大数量级的车辆数据。
而由于涉及多帧融合,Occupancy在车端有限的算力之下,很难同时实现对三维空间高精度和低延时地测量与重建。而特斯拉从2014年就开始自研芯片、2019年推出了FSD芯片,已经在自研芯片领域高筑了技术壁垒。
车企要做Occupancy网络,对于资金、时间的投入必不可少。除车端感知方案之外,车企还需要搭建算法团队、智算中心、数据闭环体系等等能力。总而言之,这不是一个一朝一夕能有成果的方向。
而使用激光雷达,将迅速减轻车企的算法开发压力。按禾赛的说法,「直接将车企城市NOA功能开发的时间缩短三年。」
原因在于,激光雷达的优势更为简单直接,对于不规则障碍物探测更加准确,尤其在中国道路环境下,激光雷达方案对于电动车的识别也更为准确。

在一项MIT的研究论文中,作者对比基于摄像头数据的算法和融合了激光雷达数据的算法结果发现:摄像头算法到了夜晚感知精度有明显的下降,而通过融合激光雷达,可以将夜晚环境的感知精度提升至3倍。
「如果车企刚刚开始做,又想很快地搞定一些场景,有激光雷达的话难度会低一些。」上汽PP-CEM&飞凡智能驾驶首席科学家金杰盂曾表示,基于激光雷达、摄像头等多传感器融合后,Occupancy的方案能够在探测范围、距离、精确性上表现得更好。
在谈到激光雷达的作用时,轻舟智航产品负责人许诺也直言,现阶段单纯依靠视觉方案,很难应对中国城市道路中的各类Corner Case。“激光雷达,是以投入换时间,加速城市NOA落地的捷径。”许诺如此表示。
当下,上激光雷达基本上是大多数车企绕不开的选择。这也是为何今年这一波重要车型上,都纷纷标配或至少选配了激光雷达的缘故。
视线放到更远的中长期,激光雷达和纯视觉竞争,其实更多是一个商业层面的选择问题。
三、显性成本 vs「冰山下的成本」
纯视觉和激光雷达的争论由来已久。
起初,马斯克抛出激光雷达无用论时,将其比喻成「拐杖」,认为成本太高,自那时起,特斯拉至今仍没有使用激光雷达。
马斯克没有说的是,采用纯视觉路线后,车端的硬件方案成本降低了,但背后的软件算法、数据训练等冰山下的隐形成本,是一笔更为昂贵的费用。
禾赛科技产品战略负责人施叶舟算了一笔账:
纯视觉路线的支出主要有三类,分别是算法迭代、云计算投入,以及数据标注等。
假设要开发一套高阶智驾功能,方案总投入需要200亿元。均摊下来,车企如果可以卖200万台车,平均单车的费用大概为1万元。能卖2000万台车,平均每台车的成本1000元。
目前,新兴的新能源车品牌,每年销量大概在10万台的水平,基本上很难承担如此高昂的投入。
而且,纯视觉尤其是Occupancy,本身也有需要回答的问题,在通用障碍物识别方面,何时能通过不断积累场景数据解决掉漏检问题,或者从根源上找到解决不可枚举问题的方法。
再来看激光雷达。

通常,主流的高阶智驾方案会采用的配置是:两颗英伟达Orin X芯片、7个800万像素摄像头、单颗激光雷达,以及毫米波雷达、超声波传感器等。
两颗Orin X的成本大概为800美元,7个800万像素摄像头的成本大概不到500美元,其他毫米波雷达、超声波雷达成本相比摄像头更低。
据施叶舟透露,「激光雷达的成本已经降到1000美元以下,这个价格与六七年前的七八万美元相比,已经降了几个数量级。」
激光雷达想要继续降成本,一是集成,将核心零部件芯片化。二是规模化,实现更多地量产上车,通过规模来平摊成本。而禾赛在这两个方向上都已经领先了一个身位。
本土车企对于激光雷达的拥抱,让激光雷达公司拥有了扩大规模不断降本的可能性。
目前,一款爆款电动车型比如小鹏G9的高阶智驾选装率,可以达到80%。
明年,按照每款车单月稳态销售1万台计算,每款车每年需要的激光雷达数量大概在10万台左右,如果选择搭载两颗激光雷达,这个数字还会翻倍。也就是,明年激光雷达的出货量,大概率会在今年10万台级的基础上成倍增长。
随着更大规模的到来,以及赶在路上的新一代产品,激光雷达「昂贵」的标签可能将很快被撕掉。
四、激光雷达对战纯视觉,车企将用脚投票
车企最终会选择纯视觉还是激光雷达方案,这个问题其实不难回答。
头部智驾玩家中,小鹏与华为均在率先应用激光雷达的能力。
「激光雷达对我来说最重要的是城市场景下各种障碍物的识别能力,因为那些障碍物是各种各样的,甚至是不可枚举的,视觉来解决有一些难度,激光雷达可以直接把3D的可达空间画出来。」原小鹏汽车自动驾驶副总裁吴新宙曾表示。
华为将激光雷达用在了GOD(通用障碍物检测)网络中,通过融合激光雷达,华为的智驾系统在暗光、逆光和眩光等场景下可以做到更准确的识别,还能识别侧翻车辆、掉落的大纸箱、落石、倒地的大树等。
将激光雷达的感知数据融合到视觉算法,对于提升感知能力的效果是非常明显的。尤其是,在最近华为与何小鹏的AEB争论中,智能驾驶与主动安全的关系被摆在桌面上。
一番争论下来,答案逐渐清晰。
更强的智驾能力一定有利于提升主动安全比如AEB能力。而激光雷达这类传感器,对于增强智驾方案感知又是毋庸置疑的。
对于车企而言,激光雷达是一个现成的工具,效果立竿见影,能够助力高阶智能驾驶功能加速量产落地,更早地进入市场。如果说智能驾驶的比拼是一场马拉松,激光雷达则直接开辟了一条捷径,可以帮助车企迅速「超车」,同时还能省去一大笔隐形的成本支。
如果有更高效的工具,何必不用呢?