2019年五一杯数学建模
A题 让标枪飞
原题再现
标枪的投掷是一项历史悠久的田径比赛项目。标枪投掷距离的远近受到运动员水平(出手速度、出手角、初始攻角、出手高度、出手时标枪的初始俯仰角速度等),标枪的技术参数(标枪的长度、重量、几何形状、重心的位置、形心的位置等)和比赛环境(空气的密度与粘度、风力、风向等)三方面因素的影响。为便于讨论,假设运动员出手高度为2m,标枪重量为800g且不考虑标枪在飞行过程中的进动影响,空气密度为1.184×10^(-3) g/cm^3 ,空气粘度为1.84×10^(-5) pa∙s(帕·秒)。
1.现有某型标枪的测量尺寸数据(见附件)。请估算该型标枪沿标枪中轴线剖面面积、标枪表面积和标枪形心的位置。(标枪示意图见【国家标准】 GB/T 22765-2008-标枪)
2.现有某标枪比赛中24名运动员使用同型号标枪投掷的实测数据(见附件)。请对这些数据进行分析,建立合适的数学模型,找出标枪飞行过程中的运动规律。
3.假设某型标枪的几何参数同问题1,重心位于形心前10cm(重心在枪尖与形心之间),出手时标枪的初始俯仰角速度为0。在无风的前提下,对标枪投掷出手瞬间、出手后的受力及运动情况进行分析,建立标枪飞行的数学模型并求解如下问题: (1)假设某运动员投掷出手速度为29.70m/s、出手角为36.6^° 、初始攻角为-0.9^°,请估算出标枪的投掷距离。(2)假设某运动员投掷出手速度为30m/s,请给出最佳的出手角和初始攻角使得投掷距离最大并估算出标枪的投掷距离。
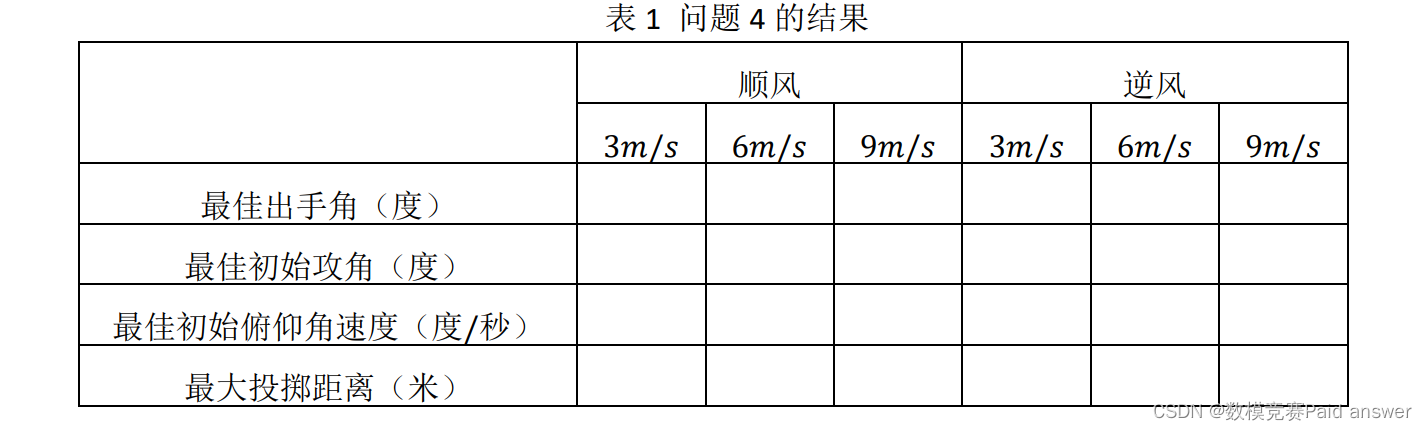
4.假设标枪技术参数同问题3,风向分别为顺风和逆风,风速分别为3m/s,6m/s和9m/s,运动员投掷出手速度为31.70m/s。请建立标枪飞行的数学模型,给出最佳出手角、最佳初始攻角、最佳初始俯仰角速度使得投掷距离最大,并填写表1。
5. 标枪技术参数同问题3,请分析运动员出手速度、出手角、初始攻角、初始俯仰角速度、风向及风速等要素对标枪投掷距离影响的相对重要性。
注1. 形心(也称为面心)是指标枪沿中轴线剖面图形的几何中心。
注2. 角度说明。出手角α是指标枪出手速度方向与水平地面的夹角; 初始攻角β是指标枪投掷出手时标枪长轴与标枪出手速度方向的夹角;持枪角γ是指标枪长轴与水平地面的夹角。初始攻角β=持枪角γ−出手角α。
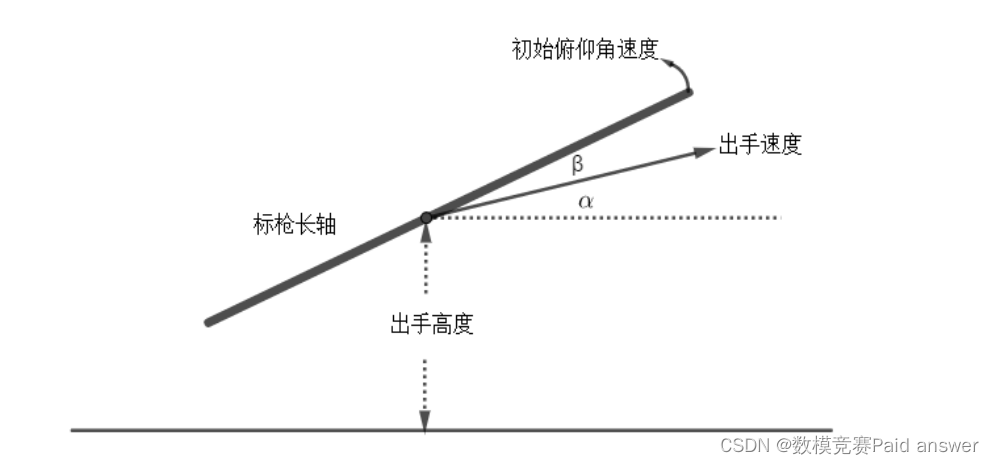
注3. 初始俯仰角速度是指标枪出手瞬间,标枪枪头半轴(枪尖至重心部分)在单位时间内围绕重心旋转的角度(标枪枪头半轴逆时针转动,标枪向上抬头----仰,初始俯仰角速度为正值;标枪枪头半轴顺时针转动,标枪低头----俯,初始俯仰角速度为负值)。运动员投掷标枪时,由于作用力的方向与标枪纵轴存在一定的偏离,从而使得标枪枪头半轴在出手瞬间出现围绕重心的俯或仰转动(也称低头或抬头),转动程度可用初始俯仰角速度加以描述。
整体求解过程概述(摘要)
标枪投掷距离的远近受到运动员水平、标枪的技术参数、比赛环境三方面因素的影响,为了得到更远的投掷距离,研究出手速度、出手角、初始攻角、初始俯仰角速度、风向及风速等要素至关重要。因此本文对标枪投掷运动体系进行研究和优化。
针对问题一,要求算出所给型号标枪沿标枪中轴线剖面面积、标枪表面积和标枪形心的位置。本文建立以最小二乘法为基础的曲线拟合模型,对标枪外形曲线进行枪身、枪头、把手三者的分段拟合。首先画出所给数据散点图,然后建立曲线拟合方程,画出拟合曲线,最终得出结果:标枪割面积为6.352 × 104𝑚𝑚2、标枪表面积为2.098 ×105𝑚𝑚2、枪尾到形心距离为1585mm、形心到枪头为1055𝑚𝑚。
针对问题二,要求根据所给数据找出标枪飞行过程中的运动规律。本文建立多元回归模型分析投掷距离和出手速度、出手角、初始攻角三者之间的关系,得到回归方程为y = −60.5415 + 4.3088𝑥1 + 0.4769𝑥2 − 0.0443𝑥3,投掷距离主要受出手角度和出手速度的影响。
针对问题三,要求建立标枪飞行的数学模型并计算相应条件下的投掷距离。本文在研究空气对运动物体的作用力、标枪飞行的受力情况的基础上,对标枪出手瞬间进行动力学分析及转动惯量的计算。对第一问进行抛体运动的研究,得出标枪的投掷距离为90.4847𝑚。对第二问采用粒子群算法得出最佳的出手角为37°,初始攻角为−0.17°,最远的投掷距离为 90.3545 𝑚。
针对问题四,要求在不同风向和风速的条件下建立标枪飞行的数学模型。本文先探讨空气动力学理论,为后文实际问题解决做铺垫;然后建立动力学模型,研究动量定理、动量矩定理、动能定理等,得出刚体平面运动微分方程;最后结合连续性方程和动量方程建立动网格守恒方程,从而得出问题结果,结果在表格中展示。
针对问题五,要求分析运动员出手速度、出手角、初始攻角、初始俯仰角速度、风向及风速等要素对标枪投掷距离影响的相对重要性。本文建立模糊综合评判模型得到模糊综合评价结果向量,再根据最大隶属度原则判断各影响因素与标枪投掷距离的关系,从而得到其相对关系:出手速度与投掷距离呈线性关系;标枪的最佳出手角为 42°;最佳初始俯仰角速度在−0.17 𝑟𝑎𝑑/𝑠 − 0 𝑟𝑎𝑑/𝑠范围内;在顺风或逆风的情况下,风速在−6 m/s—6 m/s,投掷距离与风速成正比关系。
模型假设:
(1)投射角度α与投射初速度v是两个相互独立的量。
(2)忽略标枪在飞行过程中的进动影响。
(3)重力加速度g取值为9.8𝑚/𝑠,并在投掷的任意点都相等。
(4)标枪运动轨迹在同一平面内,且地面处处水平。
问题分析:
标枪投掷距离的远近受到运动员水平(出手速度、出手角、初始攻角、出手高度、出手时标枪的初始俯仰角速度等),标枪的技术参数(标枪的长度、重量、几何形状、重心的位置、形心的位置等)和比赛环境(空气的密度与粘度、风力、风向等)三方面因素的影响。为了得到更远的投掷距离,研究出手速度、出手角、初始攻角、初始俯仰角速度、风向及风速等要素至关重要。
针对问题一,要求算出所给型号标枪沿标枪中轴线剖面面积、标枪表面积和标枪形心的位置。为了更加精确地反映标枪外形曲线,本文对这些数据进行插值与拟合处理;建立以最小二乘法为基础的曲线拟合模型,对标枪外形曲线进行枪身、枪头、把手三者的分段拟合,这样让拟合效果更加精准。首先画出所给数据散点图,然后建立曲线拟合方程,画出拟合曲线,因为所呈现的出来的曲线形状,大致为多项式函数曲线一部分;再结合实际标枪外形大致轮廓,本文选择多项式曲线对枪身轮廓进行拟合。最后得出结果:标枪割面积为6.352 × 104𝑚𝑚2、标枪表面积为2.098 × 105𝑚𝑚2、枪尾到形心距离为1585mm、形心到枪头为1055𝑚𝑚。
针对问题二,要求根据所给数据找出标枪飞行过程中的运动规律。本题是对数据进行分析,要找出投掷距离和出手速度、出手角、初始攻角三者之间的关系,因此建立多元回归模型并且进行检验。最终得到回归方 程 为 y = −60.5415 + 4.3088𝑥1 +
0.4769𝑥2 − 0.0443𝑥3,投掷距离主要受出手角度和出手速度的影响。
针对问题三,要求在无风的前提下对标枪投掷出手瞬间、出手后的受力及运动情况进行分析,建立标枪飞行的数学模型,并计算相应条件下的投掷距离。本文首先研究空气对运动物体的作用力、标枪飞行的受力情况;然后对标枪出手瞬间进行动力学分析,及采用扭摆法进行转动惯量的计算。对于第一问,因标枪运动轨迹类似于抛体运动,因此采用运动学的斜抛运动规律解决问题,得出标枪的投掷距离为11.4847𝑚。对于第二问,要求得到最佳的出手角和初始攻角,并且估算出标枪的投掷距离。因此采用粒子群算法,得出最佳的出手角为42°,初始攻角为−0.2°,最远的投掷距离为 11.3545 𝑚。
针对问题四,要求在不同风向和风速的条件下建立标枪飞行的数学模型。因为要考虑空气阻力对标枪的作用,所以需要结合空气动力学理论,研究流体运动,为后文实际问题解决做铺垫;然后建立动力学模型,研究动量定理、动量矩定理、动能定理等,得出刚体平面运动微分方程;最后结合连续性方程和动量方程建立动网格守恒方程,从而得出问题结果,结果在后文表格中展示。
针对问题五,要求分析运动员出手速度、出手角、初始攻角、初始俯仰角速度、风向及风速等要素对标枪投掷距离影响的相对重要性。本文建立模糊综合评判模型得到模糊综合评价结果向量,再根据最大隶属度原则判断各影响因素与标枪投掷距离的关系,从而得出结论如下:
(1)出手速度与标枪的投掷距离基本上呈线性关系。
(2)标枪的出手角在 0°−42°时,随着出手角的增加,标枪的投掷距离线性增加,超过 42°以后,其射程略有减小。因此,标枪的最佳出手角为 42°。
(3)初始俯仰角速度小于0 𝑟𝑎𝑑/𝑠时标枪飞行的远度要更远一些。最佳初始俯仰角速度大约在−0.17 𝑟𝑎𝑑/𝑠 − 0 𝑟𝑎𝑑/𝑠范围内。
(4)风向及风速对标枪的投掷距离的影响显著。在顺风或逆风的情况下,风速在−6 m/s—6 m/s,投掷距离与风速成正比关系。
模型的建立与求解整体论文缩略图

全部论文请见下方“ 只会建模 QQ名片” 点击QQ名片即可
程序代码:(代码和文档not free)
function diyiti()
qiangshenx1 = [0; 10; 20; 30; 40; 50100; 150; 200; 250; 300; 350400; 450; 500; 550; 600; 650700; 750; 800; 850; 900; 9501000; 1050; 1100; 1150; 12001250; 1300; 1350; 1400; 1435];
bashoux = [1435; 1450; 15001550; 1585];
qiangshenx2= [1585; 1600; 1650; 17001750; 1800; 1850; 1900; 19502000; 2050; 2100; 2150; 22002250; 2300; 2350; 2362];
qiangsheny1=[6.3; 7.06; 7.86; 8.29.08; 9.6; 11.7; 13.14; 14.4215.5; 16.7; 17.96; 19.01; 20.621.99; 23.64; 25; 25.5; 26.6827.21; 27.61; 28.35; 28.71; 29.1129.43; 29.82; 29.91; 30.04; 30.1430.14; 30.14; 30.14; 30.14; 30.14];
bashouy = 36.45*ones(1,5);
qiangsheny2=[30.14; 30.14; 30.1430.14; 30.14; 29.81; 29.49; 29.0228.73; 28.01; 27.38; 26.92; 26.2825.88; 25.26; 24.48; 23.98; 23.84];
qiangtoux = [2362; 2400; 2450; 25002550; 2600; 2610; 2620; 26302640];
qiangtouy = [12.95; 12.84; 12.5811.75; 10.8; 8.25; 7.39; 6.14; 0];
shenx1 = 0:1435;
sheny1 = interp1(qiangshenx1,qiangsheny1,shenx1,'spline');
shenx2 = 1585:2362;
sheny2 = interp1(qiangshenx2,qiangsheny2,shenx2,'spline');
bsx = 1435:1585;
bsy = interp1(bashoux,bashouy,bsx,'spline');
toux = 2362:2640;
touy = interp1(qiangtoux, qiangtouy,toux,'spline');
sheny11 = sheny1/2;
sheny12 = -sheny11;
sheny21 = sheny2/2;
sheny22 = -sheny21;
bsy1 = bsy/2;
bsy2 = -bsy1;
touy1 = touy/2;
touy2 = -touy1;
plot(shenx1,sheny11,'blue',shenx1,sheny12,'blue',...bsx,bsy1,'blue',bsx,bsy2,'blue',...shenx2,sheny21,'blue',shenx2,sheny22,'blue',...toux,touy1,'blue',toux,touy2,'blue', ...'LineWidth',3);
xlabel("长轴(mm)");
ylabel("半径(mm)");
axis ([0 2640 -200 200]);
changzhou = [shenx1,bsx,shenx2,toux];
banjing = [sheny11,bsy1,sheny21,touy];
%求切面积
disp("切面面积(mm^2):");
qiemianji=2*trapz(changzhou,banjing)
%求表面积
cemianji = pi*(6.3/2)^2+2*pi*(36.45/2)^2-2*pi*(30.14/2)^2+pi*(23.84/2)^2-
pi*(12.95/2)^2;
disp("表面面积(mm^2):");
biaomianji = trapz(changzhou,2*pi*banjing)+cemianji
%找形心
zhonghe = trapz(changzhou,pi*banjing.^2);
zhonghe = zhonghe/2;
i = 2;
yiban = 0;
while (abs(zhonghe-yiban)>445)yiban = trapz(changzhou(1:i),pi*banjing(1:i).^2);i = i +1;
end
disp("形心位置(mm):")
xingxin = changzhou(i)
function dierti()
v = 23:0.1:32;
a = 37*ones(size(v));
b = 4*ones(size(v));
x = [v',a',b'];
jieguo = juli1(x');
subplot(3,1,1);
plot(v,jieguo);
title('出手速度与投射距离的关系图');
xlabel('速度(m/s)');
ylabel('距离(m)');
subplot(3,1,2);
a = 28:0.1:45;
v = 32*ones(size(a));
b = 4*ones(size(v));
x = [v',a',b'];
jieguo = juli1(x');
plot(a,jieguo);
title('出手角度与投射距离的关系图');
xlabel('出手角度(度)');
ylabel('距离(m)');
subplot(3,1,3);
b = -10:0.2:18;
v = 32*ones(size(b));
a = 34*ones(size(v));
x = [v',a',b'];
jieguo = juli1(x');
plot(b,jieguo);
title('初始攻角与投射距离的关系图');
xlabel('初始攻角(度)');
ylabel('距离(m)');