据说,自动驾驶汽车是汽车行业梦寐以求的状态,将彻底改变交通运输业。就在几年前,对自动驾驶汽车的炒作风靡一时,那么到底发生了什么呢?这么多公司吹嘘到2021年我们将迎来的无人驾驶汽车革命在何处?事实证明,制造自动驾驶汽车比想象的难得多。让我们了解一下自动驾驶汽车的发展现状、它作为当代最具挑战性任务之一的原因,以及我们可以为此做些什么。
自动驾驶汽车的发展现状
自动驾驶汽车前景广阔:它们将改变我们的道路,创造更安全的驾驶体验。毕竟,统计数据表明,90%以上的交通事故都是人为失误造成的。早在2015年或2016年,许多汽车制造商就宣布了在未来几年让全自动商用车上路的重大计划,但我们早已超过他们最初的预期时间。对于汽车产业而言,这是个激动人心的时刻,但炒作却远远超出现实。那么,全自动驾驶汽车到底已取得哪些进展呢?利用SAE(国际汽车工程师学会)广为接受的驾驶自动化分级,有助于我们评估自 动驾驶汽车的进展情况。自动化可分为五个级别,从0级(无自动化)到5级(全自动化)。
- 0级:无自动化(驾驶员完全控制汽车)
- 1级:驾驶员协助
- 2级:部分自动化
- 3级:条件自动化
- 4级:高度自动化
- 5级:全自动化(自动驾驶汽车)
目前,大多数售出的汽车至少都处于1级水平,即可以提供一些辅助驾驶功能。这些功能包括车道辅助或自适应巡航控制。特斯拉Autopilot级别为2级,这意味着它可以控制方向盘和速度,但驾驶员仍然需要密切关注情况,随时准备手动驾驶。本田在2021年3月推出一款已经达到3级水平的车型——Legend Sedan,该车型仅在非常特定的条件下才需要驾驶员手动驾驶。至于4级,有几家公司在这方面取得了进展:通用汽车、戴姆勒和谷歌的进展都值得注意。例如,谷歌Waymo在特定的地理围栏内(即美国亚利桑那州的某些郊区和其他几个受控地点)可实现全自动驾驶。我们预计这项技术将于2024年和2025年得到应用。目前,市场上还没有自动驾驶水平达到5级的汽车,各公司在认识到全自动驾驶与生俱来的巨大挑战后,纷纷推迟了其部署时间表。这种渐进式发展的一个积极结果是,汽车将逐步提升自动化水平,而不是一蹴而就,从而帮助建立客户的信任感。很难说我们什么时候会迎来无人驾驶汽车的革命。我们与其做出更多可能无法实现的预测,不如专注于解决实现具体目标的挑战。
制造自动驾驶汽车为什么如此具有挑战性?
归根结底,问题在于,制造出能适应各种情况的全自动驾驶汽车极其困难。这比汽车专家在开始预测时认识到的情况要复杂得多,因此,各公司要么推迟时间表、要么出售自动驾驶汽车部门,要么改进研制方法。我们来谈谈自动驾驶汽车项目如此困难的原因:
- 世界太复杂。自动驾驶汽车必须在一个高度复杂的世界中行驶,其中包括各种道路、路牌、行人、其他车辆、建筑物等等。
- 人类难以捉摸。自动驾驶汽车不仅需要了解驾驶员,还需要能够预测人类行为,而我们知道,人类行为相对而言不可预测。
- 技术太昂贵。自动驾驶汽车必须安装有关硬件(比如摄像头、激光雷达系统和雷达)用于捕捉外部世界信息,并帮助汽车做出决策。但这种硬件还需要显著改进,才能提供汽车所需的详细数据水平。它的性价比也不是很高。
- 训练必须全面。我们需要针对各种可能发生的情况(例如,雪或雾等极端天气)对自动驾驶汽车进行训练;但要预测汽车可能遇到的所有情况却非常困难。
- 没有犯错的余地。自动驾驶汽车直接影响着驾驶员和乘客的安全,生死攸关。自动驾驶系统必须非常准确。
数据是关键
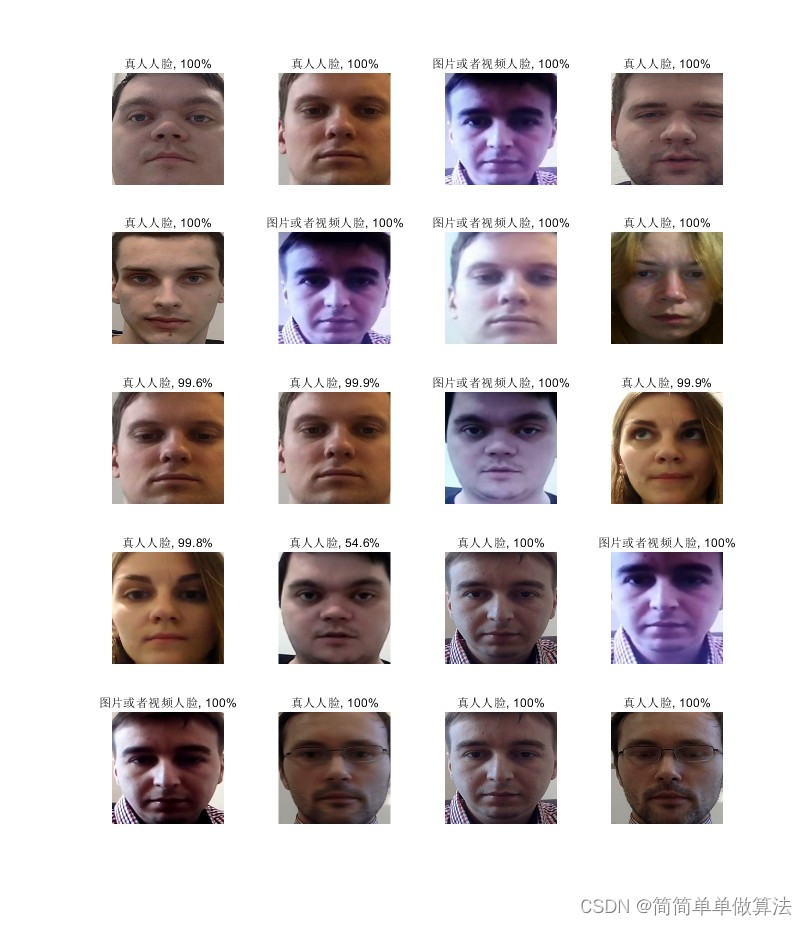
要解决上述挑战,就要从它们的根源入手。为此,我们需要了解自动驾驶汽车的工作原理。自动驾驶汽车要依靠人工智能(AI),尤其是计算机视觉模型,使汽车能够“看到”周围的世界,然后根据所看到的情况做出决定。数据通过汽车上的硬件(如前所述,摄像头、激光雷达、雷达和其他类型的传感器数据)捕获,并用作模型的输入。例如,要让汽车对道路上的行人做出反应,就需要汽车之前看到过表示这种情况的传感器数据。换言之,汽车需要使用代表所有可能的场景和情况的数据予以训练。想想乘坐汽车的经历,不难理解,道路上会发生各种各样的情况,因此就要有大量训练数据。仅行人一方面,就需要在训练数据中包括儿童和成人、坐轮椅的人、婴儿车的婴儿以及其他意想不到的场景示例。例如,我们还希望自动驾驶模型能够将实际行人与标志牌上的人脸图片区分开来。可以看出,看似简单的用例很快就会变得复杂。不仅汽车需要大量的训练数据,这些训练数据还需要进行准确的标注。AI模型无法只是看着行人的图像就能理解看到的是什么;我们还需要有清晰的标签,说明图像的哪一部分包括行人。由于这种复杂性,就需要为自动驾驶汽车AI模型提供许多不同类型的标注数据:
- 激光雷达和雷达数据点云标注:识别并跟踪场景中的对象
- 2D标注(包括相机数据的语义分割):使模型理解各像素所属类别
- 视频对象和事件跟踪:帮助模型理解场景中的对象如何随时间移动
- 等等
数据标注几乎没有出错的余地,也不容缺少关键用例。最终,自动驾驶汽车的数据采集和标注是个非常耗时的资源密集型过程,但很多公司在一开始并未完全认识到这一点。这就是导致自动驾驶上市时间延迟、性能堪忧以及仍未推广的原因。不过,这些问题也是汽车制造商为取得成功而需要解开的关键难题。
准确性、多样性和效率是确保安全的关键
为进一步了解自动驾驶汽车数据的关键考虑因素,我们找来了澳鹏数据科学家杨晓瑞(音译),她专门从事计算机视觉研究。
准确性准确感知周围环境,检测并预防危险,对自动驾驶汽车顺利完成运输任务至关重要。数据应该足够准确,这样AI模型才能从中学习,只有对障碍物的位置进行精确推断才能做出合理的决策。例如,如果模型无法准确检测到在最近车道上沿水平方向移动的卡车,就往往导致错误的刹车,从而让用户体验大打折扣。
多样性场景:实际环境的天气可能多种多样:下雨、下雪、有雾;不同光照条件:晴天、黑夜、大雨前的阴天等。自动驾驶汽车应该能够应对所有场景。因此,训练数据既要包括常见的情况,还要包括罕见的情况。
各种模式:传感器在不同环境中表现不一。例如,由于物理特性,激光雷达在雨天或雪天的性能会下降。从直观上看,相机在晚上无法像在白天看得那么远。因此,大多数公司在困难的环境感知情况下仍然使用多种类型的传感器来互相补充。
效率当各公司在一个新的国家/地区或城市用自动驾驶汽车进行试验时,数据的效率对整个试验的进展至关重要。如果没有按时准备好标注的训练数据,项目延迟风险就会增加。一个好的数据合作伙伴应该能借助先进的感知模型及时提供数据,并为其他耗时的任务节省时间。