一、SPI通信
0.IIC与SPI的优缺点
https://blog.csdn.net/weixin_44575952/article/details/124182011

1.SPI介绍
同步(有时钟线),高速,全双工(数据发送和数据接收各占一条线)
1)SCK:时钟线-->SCLK,CLK,CK--->等价于IIC的SCK
2)MOSI(主机输出从机接收),MISO(主机接收从机输出):DO(Data Output),DI(Data Input)--->等价于IIC的SDA
3)SS(片选):NSS(Not Slave Select)-->低电平有效,CS(Chip Select)-->专门进行主机和该指定从机的通信线路(可能不只一条)
4)SPI只接受:一主多从
5)SPI没有应答数据

DO,DI的区别
先确定芯片的身份(主机/从机)

2.硬件电路
1)SCK是主机控制,SCK是主机输出,SCK是从机接收
2)MOSI(主机输出从机接收)
3)MISO(主机接收从机输出)
4)SS:从机选择线(低电平有效)

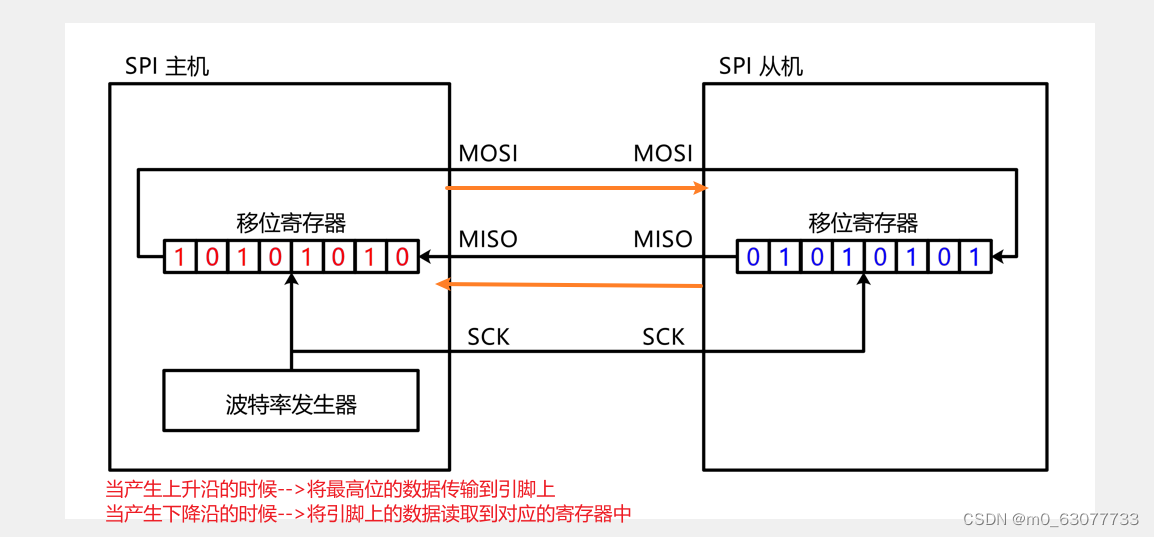
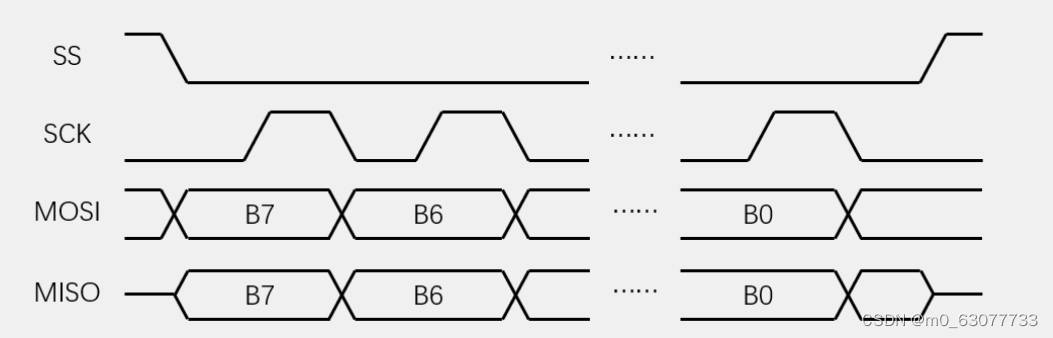
3.移位示意图
SPI的数据收发:基于字节交换
如果单纯想要接收或者发送—---则将接收或者发送的数据自动屏蔽掉即可
只发送,只接收,既发送既接收
4.SPI时序基本单元
SPI发起指令操作的时候传输的数据单元是=指令码+寄存器地址+操作数
1.起始条件
SS低电平有效,通信时间段内一直保持低电平
起始条件:SS从高电平切换到低电平
2.终止条件
终止条件:SS从低电平切换到高电平

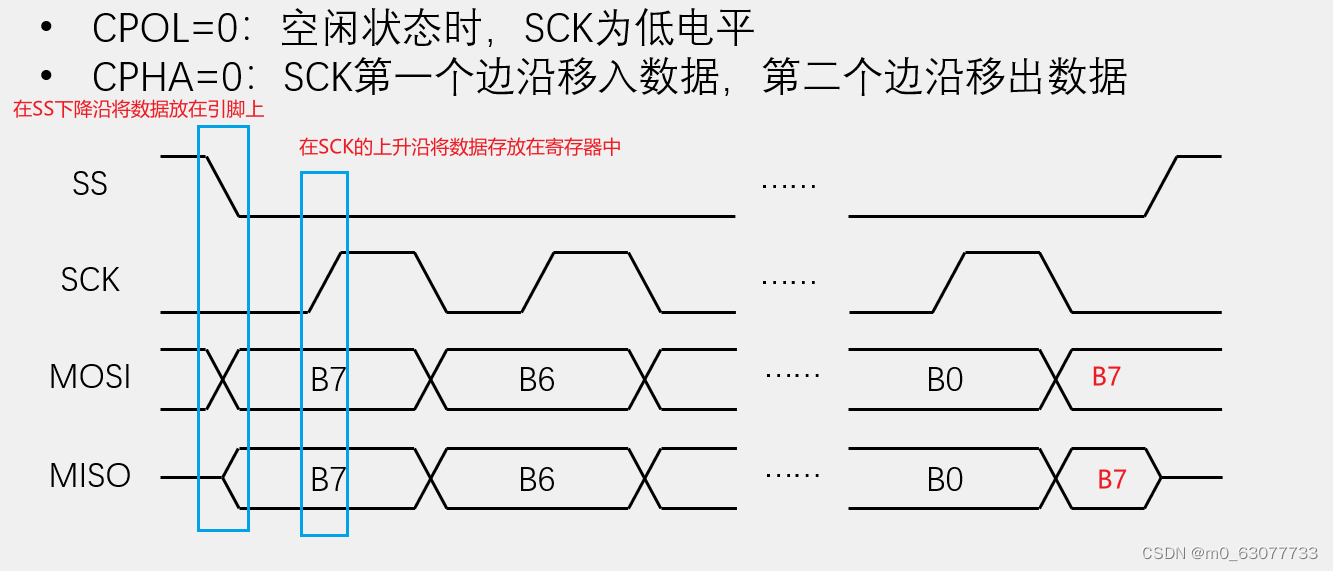
3.交换一个字节(模式1)
模式1:第一个边沿放数据,也可以描述成高电平放数据,第二个边沿采集数据,也可以描述成低电平采集数据(采集数据时数据不能更改)
下降沿采样(将数据读入寄存器中)

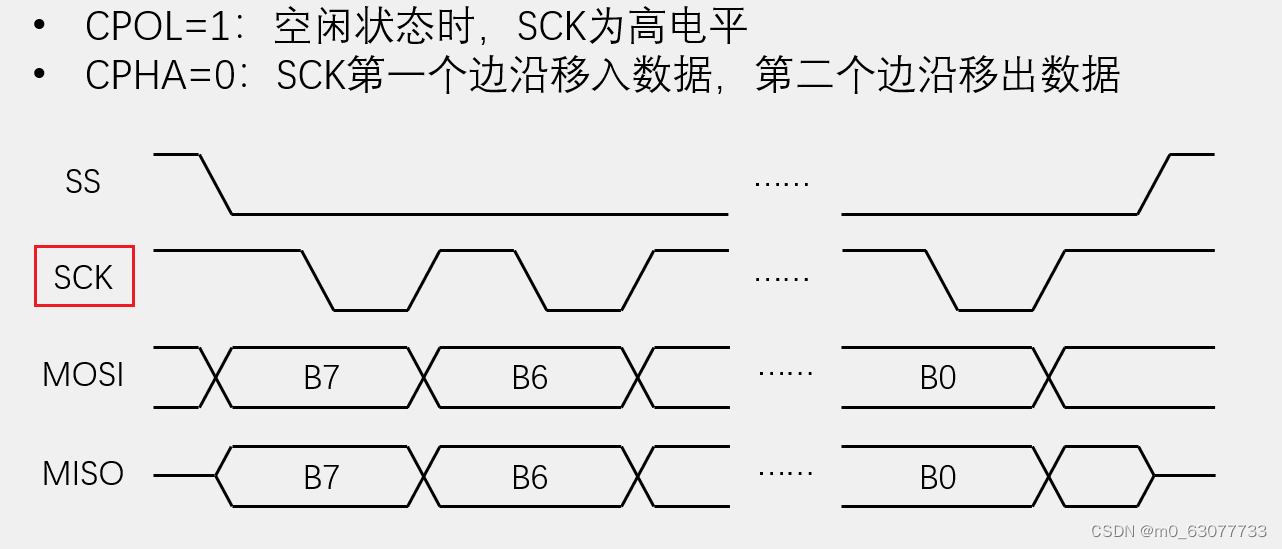
4.交换一个字节(模式3)
与模式1的区别:SCK极性取反(CPOL=1)

5.交换一个字节(模式0)
相比于模式1,数据输出快了半个时钟
上升沿采样(将数据读入寄存器中)
6.交换一个字节(模式2)
与模式0的区别:SCK极性取反(CPOL=1)
7.注意点:
1)CPOL:用于设置极性(1表示高电平有效,0表示低电平有效)
2)CPHA:不是用于决定上升沿读取还是下降沿读取,而是决定第几个周期进行采样。
3)一般如果我们想要接收数据&读取数据,则我们可以随便写入&读出一个值即可,其他不用理会。(我们一般发送0xff或者0x00)
5.SPI时序
1.发送指令
使用模式0(在时序开始前存放数据,在上升沿读取数据)
发送0x06(芯片公司自己定义)--->W25Q64是写使能
接收到0xff不需要看(因为我们目的是主机发送给从机,所以从机传输的数据是什么无所谓)

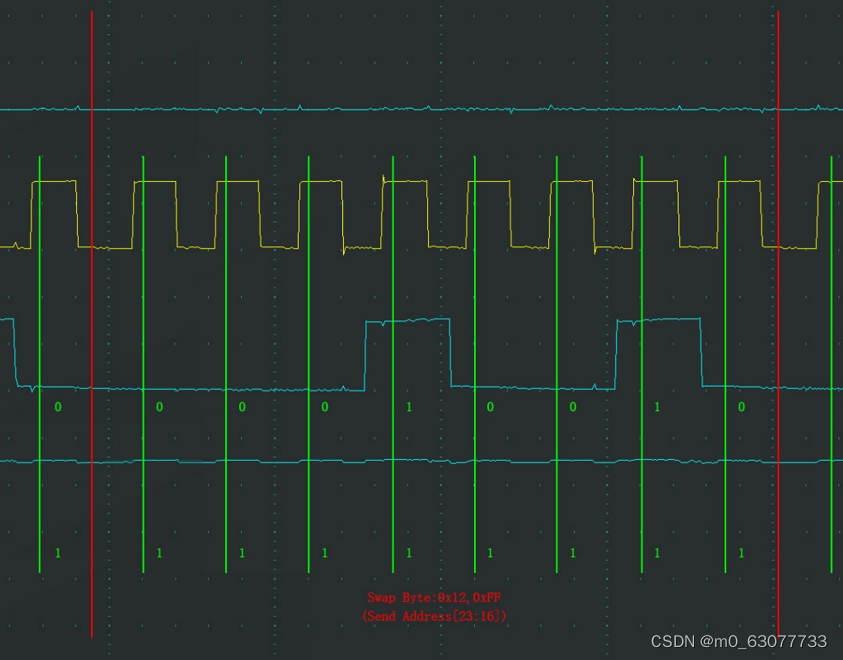
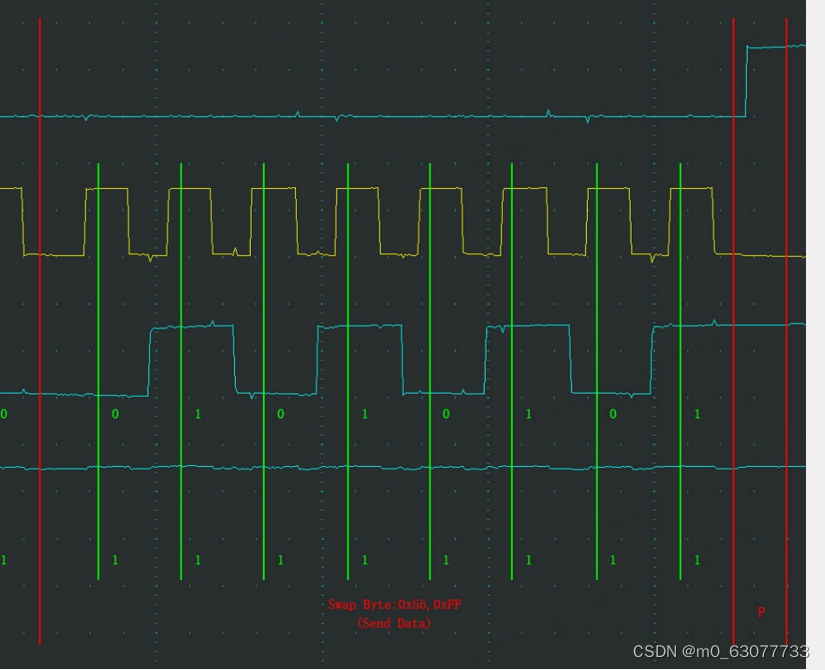
2.指定地址写

1)向SS指定的设备,发送写指令(0x02),
2)随后在指定地址(Address[23:0])下,写入指定数据(Data)
由此图可知要在地址为:0x123456下写入0x55这个数据



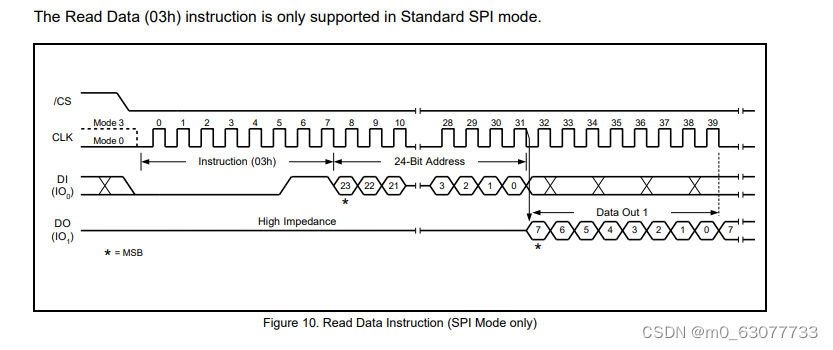
3.指定地址读
1)向SS指定的设备,发送读指令(0x03),
2)随后在指定地址(Address[23:0])下,读取从机数据(Data)

二、单片机中用到的存储器
1.物理层存储器
1)磁存储原理:磁带,软盘,机械硬盘(磁盘)
2)光刻存储:DVD
3)半导体存储:EEPROM,NandFlash,NorFlash
2.Nand和Nor的差异
(1)Nand容量大,价格低,需要按块访问(不能按字节访问),需要专用时序接口访问(不能直接接到地址总线上)
(2)Nor容量小,价格高,按块擦和写、按字节读,需要专用时序接口访问
不同点

相同点

3.单片机系统常用存储解决方案
(1)单片机自身代码:存储在内部Flash中,本质是NorFlash
(2)存少量掉电不丢失数据,用EEPROM(一般都是比较小)--》IIC通信(速度较慢),典型24C02
(2)存中容量掉电不丢失数据,用SPINorFlash(使用SPI是为了减少引脚)--》SPI通信(速度比IIC快),一般64k-32MB范围
(3)存大容量掉电不丢失数据,用SPINandFlash,一般32MB-1GB范围
(4)要便于插拔和扩展,用TF/SD卡,U盘等,一般容量在GB级别。
(5)现在还有新型的SDNand,就是芯片封装的SD卡,容量在nMB-1GB级别。
(6)更大容量板载存储,用eMMC芯片,一般容量4GB-256GB级别
(7)STM32内部Flash可以开放给程序用,存储少量掉电不丢失数据。
4、存储器总结
(1)多种可用,根据产品特点和需求选择,重点考虑:性价比、容量、寿命、速度、可靠性等因素,大多数行业都有选型惯例。
(2)程序员不必过多关心内部存储颗粒特性,更多关心编程接口即可。
三、W25Q64
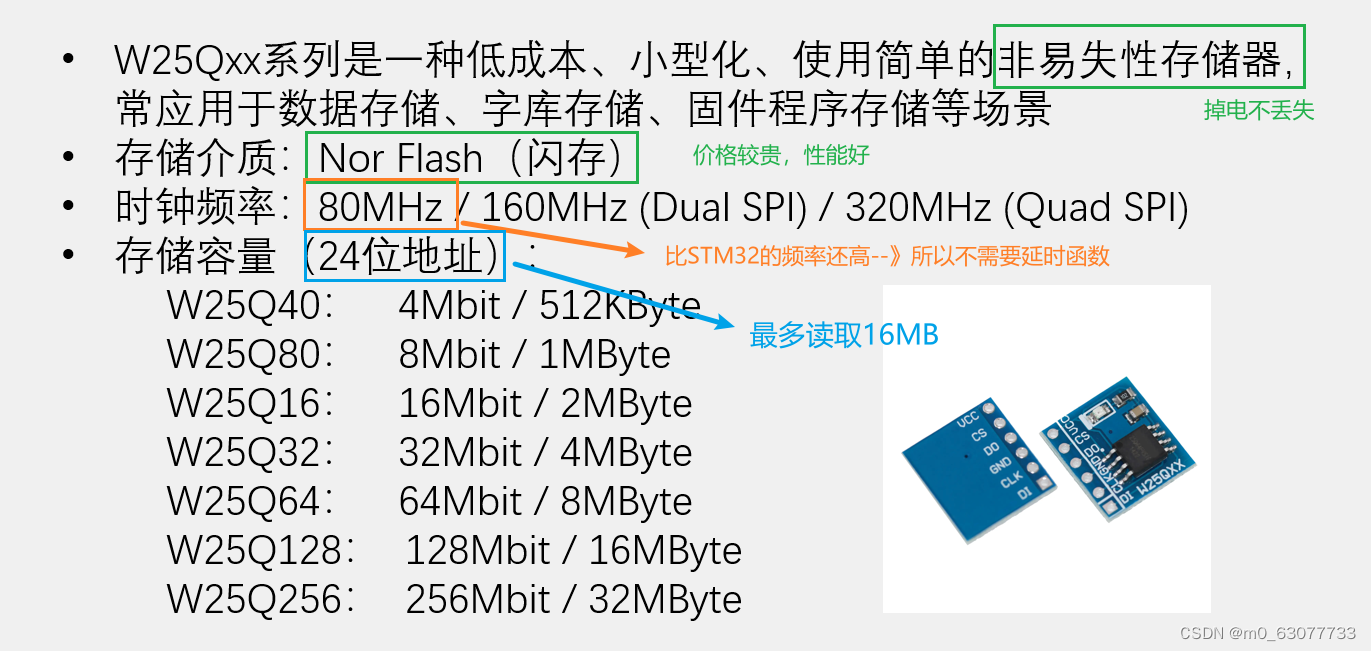
1.W25Q64简介
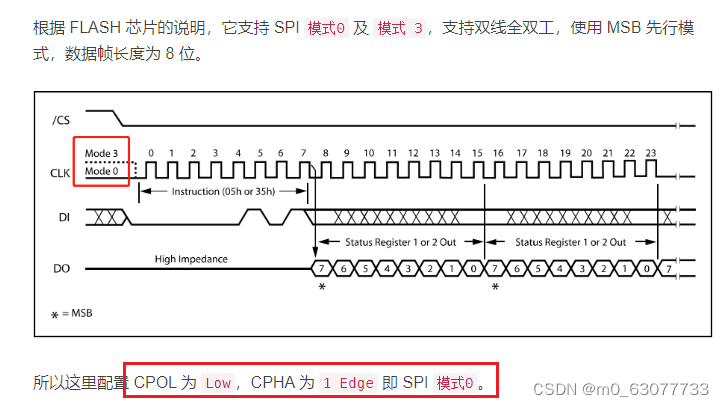
开发板中的 FLASH 芯片型号:W25Q64。W25Q 系列为台湾华邦公司推出的是一种使用 SPI 通讯协议的 NOR FLASH 存储器。芯片型号后两位表示芯片容量,例如 W25Q64 的 64 就是指 64Mbit 也就是 8M 的容量。它的 CS/CLK/DIO/DO 引脚分别连接到了 STM32 对应的 SPI 引脚 NSS/SCK/MOSI/MISO 上,其中 STM32 的 NSS 引脚虽然是其片上 SPI 外设的硬件引脚,但实际上后面的程序只是把它当成一个普通的 GPIO,使用软件的方式控制 NSS 信号,所以在 SPI 的硬件设计中,NSS 可以随便选择普通的 GPIO,不必纠结于选择硬件 NSS 信号。
FLASH 芯片中还有 WP 和 HOLD 引脚。WP 引脚可控制写保护功能,当该引脚为低电平时,禁止写入数据。我们直接接电源,不使用写保护功能。HOLD 引脚可用于暂停通讯,该引脚为低电平时,通讯暂停,数据输出引脚输出高阻抗状态,时钟和数据输入引脚无效。我们直接接电源,不使用通讯暂停功能。
1)AT24C存储容量是KB级别的,W25Q64是MB级别
2)存储容量:24位地址

2.硬件电路

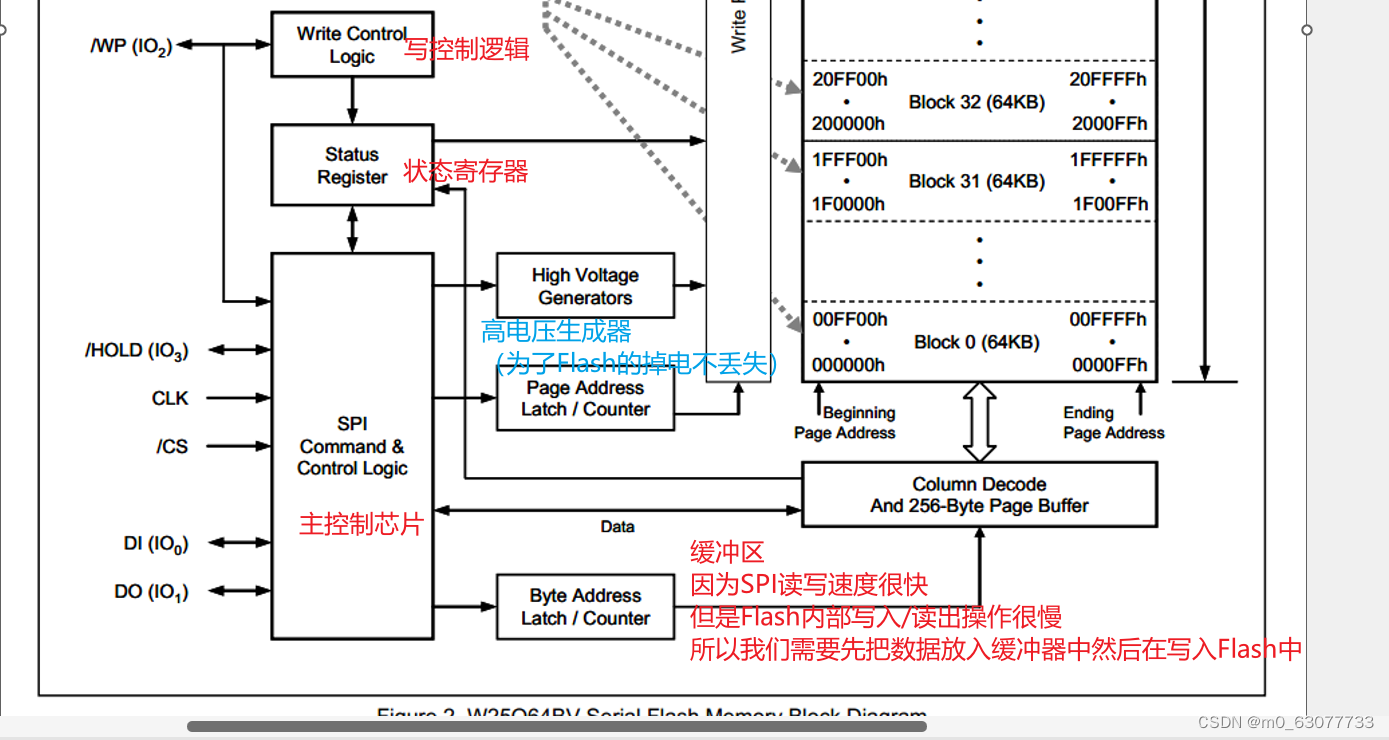
3、W25Q64框图

1)W25Q64使用的存储空间是8MB(128*64=8,192bit--->8,192/1024=8MByte)(实际上可以使用16MB)-->所以地址从:0x00 00 00到0x7f ff ff
2)存储空间的划分:先划分为若干块,在划分为若干扇区,最后划分为若干页
1.分为Block
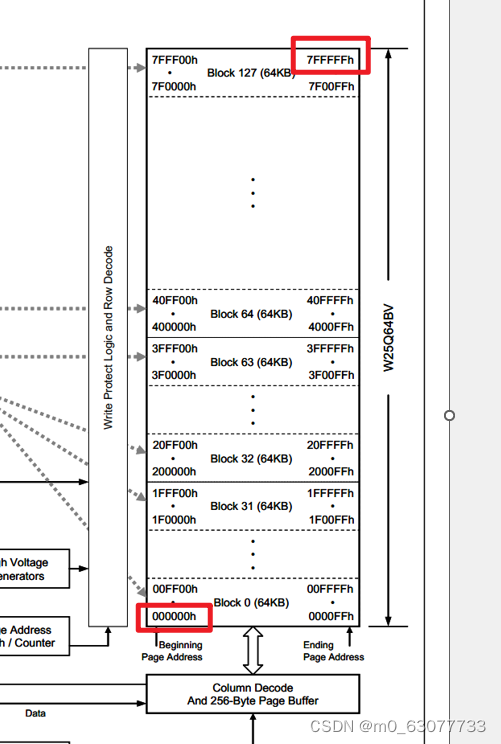
将8MB/128Block分为64KB(每一个大小为64KB,0-127)

2.分为Sector
将64KB/16分为4KB

3.分为page
将4K/25bit分为16bit

4.其他部分
SPI控制器,状态寄存器,数据缓存区
5.Flash操作的注意事项
1)如果我们没有对Flash进行擦除,则原来是(0xAA:1010 1010)如果想要修改为(0x55:0101 0101)--->实际上无法修改【因为数据位只能由1-->0,无法从0-->1】
2)如果不进行擦除,则【读出数据=原始数据&写入数据】
3)因为要擦除(将全部数据位置为1),所以我们如果读写Flash输出为0xff,则表示该位置被擦除后未被重写过
4)擦除的最小单位:扇区(4096字节)为单位
5)一个写入时序,最多只能写一页的数据(不能跨页),页就是256字节【因为页缓冲区只有256字节】,超出部分会覆盖前面的位置部分
6)写入操作后,芯片会处于忙状态,因为要将缓冲区中的数据写入Flash中【所以我们在执行写操作的代码后,要检测芯片是否处于忙状态】
7)在要进行读操作之前也要先判断芯片是否处于忙状态
8)写入不能跨页,但是读取可以跨页
9)SPIFlash读写的最小单位是1个字节,而且地址不必对齐


四、SPIFlash(W25Q64)数据手册解读
https://www.aiema.cn/part/datasheet/w25q64dwzpig-fn195394276

1、主要SPIFlash厂家
(1)SPIFlash本质:SPI接口芯片+内部存储颗粒(Nand,Nor)
(2)台湾:Winbond华邦(W开头)、MXIC旺宏(M开头)
(3)国内:GD兆易创新(GD开头)
2.数据手册查看
1.标准SPI指令

2.状态寄存器
1)写入数据后,不需要我们手动将写失能【会自动失能】
2)一个写使能,只能保证后续一条写指令可以操作

BUSY 是状态寄存器 (S0) 中的只读位,当器件正在执行命令时,该位设置为 1 状态
页编程、四页编程、扇区擦除、块擦除、芯片擦除、写入状态寄存器或
擦除/编程安全寄存器指令。 在此期间设备将忽略进一步的指令
除了读取状态寄存器和擦除/编程暂停指令(参见 tW、tPP、tSE、tBE 和
交流特性中的 tCE)。 当编程、擦除或写入状态/安全寄存器指令有
完成后,BUSY 位将被清除为 0 状态,指示设备已准备好接受进一步的指令。

写使能锁存器 (WEL) 是状态寄存器 (S1) 中的一个只读位,在执行
写使能指令。 当器件写禁止时,WEL 状态位清零。 一个写
上电时或执行以下任何指令后会出现禁用状态:写入禁用、页面
编程、四页编程、扇区擦除、块擦除、芯片擦除、写状态寄存器、擦除
安全寄存器和程序安全寄存器。
3.指令表


五、软件SPI读写
1.硬件接线



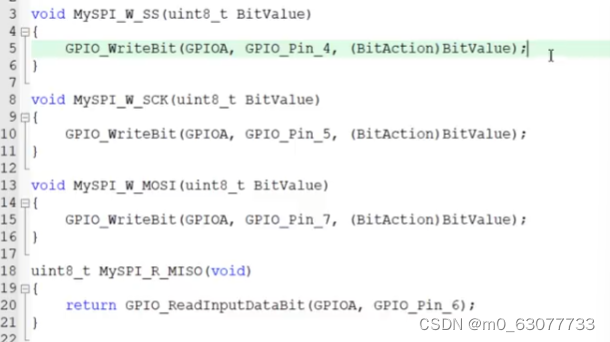
2.SPI代码编写
#include "stm32f10x.h" // Device headervoid MySPI_W_CS(uint8_t BitValue)
{GPIO_WriteBit(GPIOA,GPIO_Pin_4,(BitAction)BitValue);
}
void MySPI_W_CLK(uint8_t BitValue)
{GPIO_WriteBit(GPIOA,GPIO_Pin_5,(BitAction)BitValue);
}
void MySPI_W_MOSI(uint8_t BitValue)
{GPIO_WriteBit(GPIOA,GPIO_Pin_7,(BitAction)BitValue);
}
uint8_t MySPI_R_MISO(void)
{return GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_6);
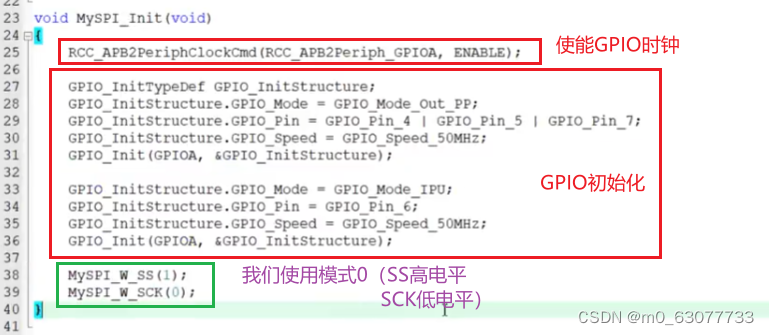
}void MySPI_Init(void)
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);GPIO_InitTypeDef GPIO_Init_Structure;//要求配置为推挽输出,浮空或上拉输入GPIO_Init_Structure.GPIO_Mode=GPIO_Mode_IPU;GPIO_Init_Structure.GPIO_Pin=GPIO_Pin_6;GPIO_Init_Structure.GPIO_Speed=GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_Init_Structure);GPIO_Init_Structure.GPIO_Mode=GPIO_Mode_Out_PP;GPIO_Init_Structure.GPIO_Pin=GPIO_Pin_4|GPIO_Pin_5|GPIO_Pin_7;GPIO_Init_Structure.GPIO_Speed=GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_Init_Structure);MySPI_W_CS(1);MySPI_W_CLK(0);
}
//三个基本时序:起始,交换数据,终止
void MySPI_Start(void)
{MySPI_W_CS(0);
}
void MySPI_Stop(void)
{MySPI_W_CS(1);
}
//通过掩码,依次挑出每一位操作,优点是保留了原数据的值
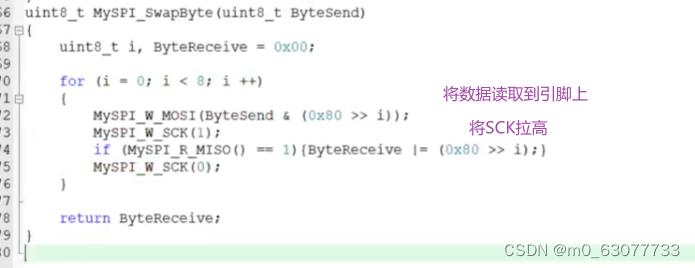
uint8_t MySPI_SwapByte(uint8_t ByteSend)
{uint8_t i,ByteReceive = 0x00;for(i = 0;i < 8;i ++){MySPI_W_MOSI(ByteSend &(0x80>>i));MySPI_W_CLK(1);if(MySPI_R_MISO() == 1){ByteReceive |= (0x80 >> i);}MySPI_W_CLK(0);}return ByteReceive;
}//还可以按照移位示意图中的方式交换数据,优点是效率高,但不能保存原数据值
//uint8_t MySPI_SwapByte(uint8_t ByteSend)
//{
// uint8_t i;
// for(i=0;i<8;i ++)
// {
// MySPI_W_MOSI(ByteSend &0x80);
// ByteSend <<=1; //最高位移出,最后补0
// MySPI_W_CLK(1);
// if(MySPI_R_MISO() == 1) {ByteSend |= 0x01;} //输入的数据放在最低位
// MySPI_W_CLK(0);
// }
// return ByteSend;
//}0.电平翻转函数封装
因为W25Q64的频率很快,所以中间不需要添加延时函数
1.初始化
2.起始信号

3.终止信号

4.交换(发送/接收)一个字节(模式0)
主机发送数据给从机,从机发送数据给主机
1)SS设置为下降沿
2)将数据读入到引脚
3)SCK设置为上升沿
4)将数据从引脚读出
5)将SCK设置为下降沿
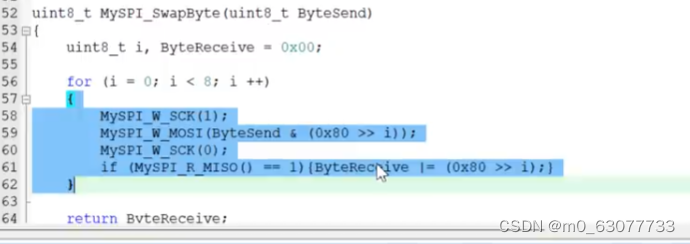
5.交换(发送/接收)一个字节(模式1)

3.W25Q64代码
#include "stm32f10x.h" // Device header
#include "MySPI.H"
#include "W25Q64_INS.H"void W25Q64_Init(void)
{MySPI_Init();
}
//用指针的方式来获取多个函数的值!!!
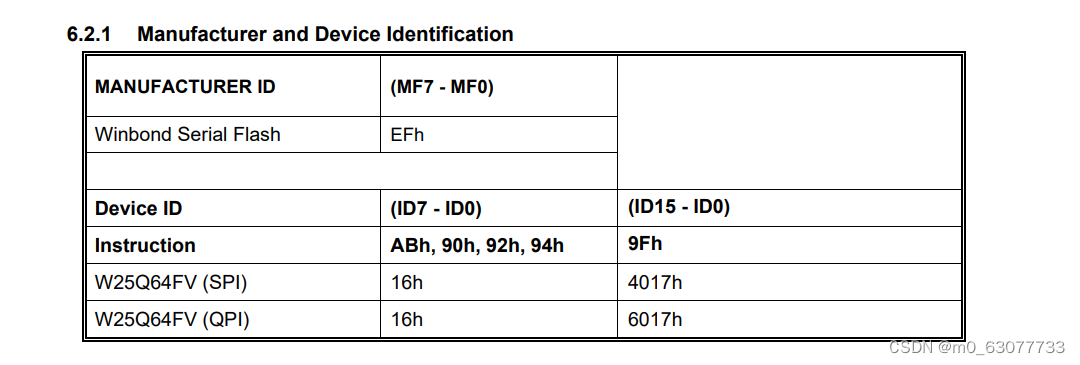
void W25Q64_ReadID(uint8_t *MID,uint16_t *DID)
{MySPI_Start();MySPI_SwapByte(W25Q64_JEDEC_ID);*MID = MySPI_SwapByte(W25Q64_DUMMY_BYTE);*DID = MySPI_SwapByte(W25Q64_DUMMY_BYTE);*DID <<= 8;*DID |= MySPI_SwapByte(W25Q64_DUMMY_BYTE);MySPI_Stop();
}
void W25Q64_WiteEnable(void)
{MySPI_Start();MySPI_SwapByte(W25Q64_WRITE_ENABLE);MySPI_Stop();
}
/*** @brief 直到BUSY清零后结束* @param * @retval */
void W25Q64_WaitBusy(void)
{uint32_t Timeout=100000; //为了防止卡死MySPI_Start();MySPI_SwapByte(W25Q64_READ_STATUS_REGISTER_1);//直到busy不为1while((MySPI_SwapByte(0xFF) & 0X01) == 0X01){Timeout--;if(Timeout == 0){break;}}MySPI_Stop();
}//页编程写入,注意页编程写入一页的范围
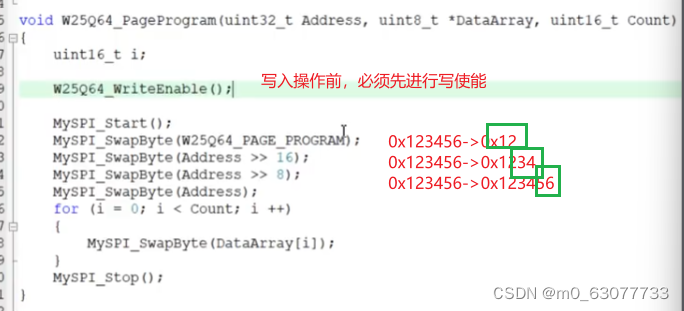
void W25Q64_PageProgram(uint32_t Address,uint8_t *DataArray,uint16_t count)
{//没有24位,通过数组可以传多个字节。所以用32位,写入数据的数量范围0-256,所以用uint16不用uint8W25Q64_WiteEnable();uint16_t i;MySPI_Start();MySPI_SwapByte(W25Q64_PAGE_PROGRAM);MySPI_SwapByte(Address >> 16);MySPI_SwapByte(Address >> 8); //高两位会丢弃MySPI_SwapByte(Address);for(i=0;i < count ;i++){MySPI_SwapByte(DataArray[i]);}MySPI_Stop();W25Q64_WaitBusy();
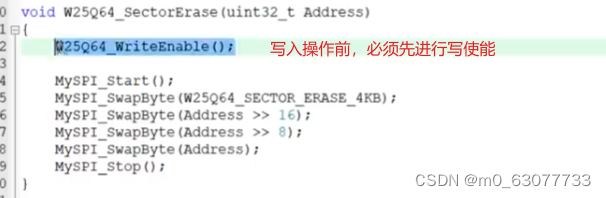
}void W25Q64_SectorErase(uint32_t Address)
{//写使能仅对之后跟随的一条时序有效,结束之后会失能,所以每个函数加入这个就不用再写失能W25Q64_WiteEnable();MySPI_Start();MySPI_SwapByte(W25Q64_SECTOR_ERASE_4KB);MySPI_SwapByte(Address >> 16);MySPI_SwapByte(Address >> 8); MySPI_SwapByte(Address);MySPI_Stop();W25Q64_WaitBusy();
}void W25Q64_ReadData(uint32_t Address,uint8_t *DataArray,uint32_t count) //改为32位
{ uint32_t i;MySPI_Start();MySPI_SwapByte(W25Q64_READ_DATA);MySPI_SwapByte(Address >> 16);MySPI_SwapByte(Address >> 8); MySPI_SwapByte(Address);for(i=0;i < count ;i++){//调用交换读取之后,内部指针自动自增DataArray[i]=MySPI_SwapByte(W25Q64_DUMMY_BYTE);}MySPI_Stop();
}0.初始化
1.获取ID

实际上是【抛砖引玉】


2.宏定义
3.写使能

4.读状态寄存器1
判断当前芯片是否处于忙状态



5.Page Program
这里我们传入数据为uint16_t,不能写uint8_t,因为int8最大是255,而我们page最大256,所以如果使用int8空间不足够
如果发送到设备的字节超过256个,寻址将封装到页的开头,并覆盖以前发送的数据。
DataArray:写入的数值
写入操作前,必须先进行写使能

6.Sector Erase (4KB)
写入操作前,必须先进行写使能

7.Read Data
DataArray:返回读取到的数值


4.测试代码

#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "LED.H"
#include "Key.h"
#include "OLED.H"
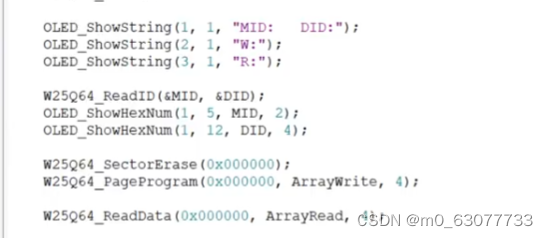
#include "W25Q64.H"uint8_t MID;
uint16_t DID;uint8_t ArrayWrite[]={0x55,0x66,0x77,0x88};
uint8_t ArrayRead[4];
int main(void)
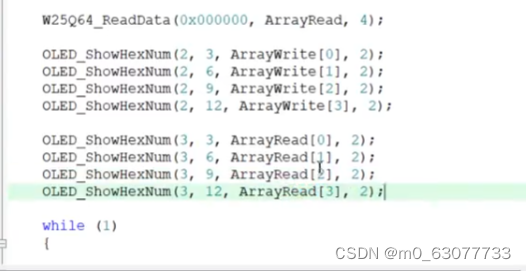
{OLED_Init();W25Q64_Init();OLED_ShowString(1,1,"MID: DID:");OLED_ShowString(2,1,"W:");OLED_ShowString(3,1,"R:");W25Q64_ReadID(&MID,&DID);OLED_ShowHexNum(1,5,MID,2);OLED_ShowHexNum(1,12,DID,4);//只擦除不写入,可以验证flash擦除之后变为ff//不擦除直接改写,可以测试不能由0到1,只能1到0//写之前先擦除。xxx000-xxffffW25Q64_SectorErase(0x000000); //页地址范围xxxx00-xxxxffW25Q64_PageProgram(0X000000,ArrayWrite,4); W25Q64_ReadData(0X000000,ArrayRead,4);OLED_ShowHexNum(2,3,ArrayWrite[0],2);OLED_ShowHexNum(2,6,ArrayWrite[1],2);OLED_ShowHexNum(2,9,ArrayWrite[2],2);OLED_ShowHexNum(2,12,ArrayWrite[3],2);OLED_ShowHexNum(3,3,ArrayRead[0],2);OLED_ShowHexNum(3,6,ArrayRead[1],2);OLED_ShowHexNum(3,9,ArrayRead[2],2);OLED_ShowHexNum(3,12,ArrayRead[3],2);while(1){}
}5.事前等待 VS 事后等待
1.事前等待
表示我们在编写一个函数之前,先判断此时芯片是否处于忙状态。但是需要每一个函数前都进行判断(读寄存器&&写寄存器都要进行判断)
2.事后等待
表示我们在写完一个执行写操作的函数后,在程序退出之前查看芯片是否处于忙状态。此时如果处于忙状态则我们可以停下来等待,如果不处于忙状态则直接退出。不用每一个函数中都调用。
3.小总结
事前等待:1、写入前先等待,等不忙了再写入 2、效率高。 3、在写入和读取操作之前都要等待。
事后等待:1、写入后立刻等待,不忙了退出。 2、这样最保险,函数结束后,函数之外的地方芯片肯定不忙。 3、只需在写入后等待。
六、W25Q64的HAL源代码解析
1、 CubeMX例程展示
【精选】STM32CubeMX学习笔记(10)——SPI接口使用(读写SPI Flash W25Q64)_stm32cubemx配置spi-CSDN博客
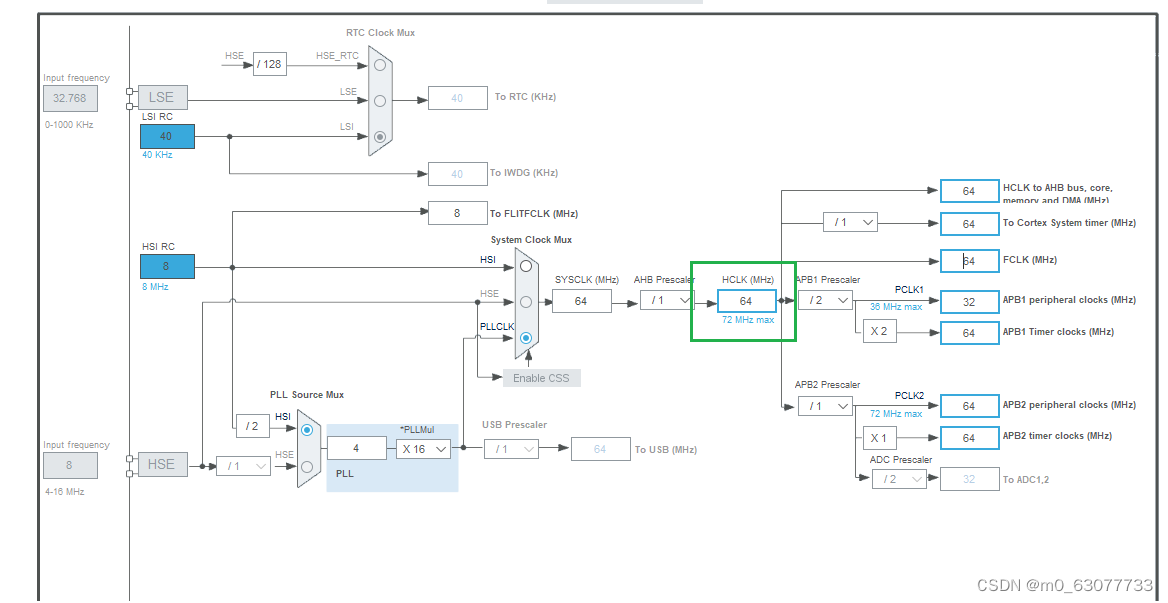
1.时钟设置
2.SPI设置
1)在
Connectivity中选择SPI1设置,并选择Full-Duplex Master全双工主模式,不开启 NSS即不使用硬件片选信号

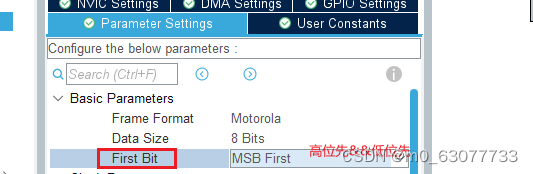
SPI 为默认设置不作修改。只需注意一下,
Prescaler分频系数最低为4,波特率 (Baud Rate) 为18.0 MBits/s。这里被限制了,SPI1 最高通信速率可达 36Mbtis/s。
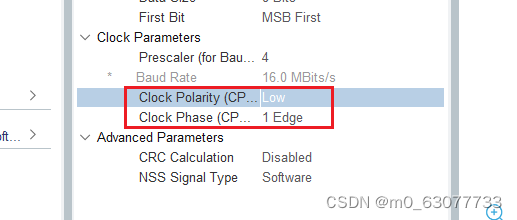
- Clock Polarity(CPOL):SPI 通讯设备处于空闲状态时,SCK 信号线的电平信号(即 SPI 通讯开始前、 NSS 线为高电平时 SCK 的状态)。CPOL=0 时, SCK 在空闲状态时为低电平,CPOL=1 时,则相反。
- Clock Phase(CPHA):指数据的采样的时刻,当 CPHA=0 时,MOSI 或 MISO 数据线上的信号将会在 SCK 时钟线的“奇数边沿”被采样。当 CPHA=1 时,数据线在 SCK 的“偶数边沿”采样。


3.设置SS(CS:片选)
原理图中虽然将 CS 片选接到了硬件 SPI1 的 NSS 引脚,因为硬件 NSS 使用比较麻烦,所以后面直接把 PA4 配置为普通 GPIO,手动控制片选信号。
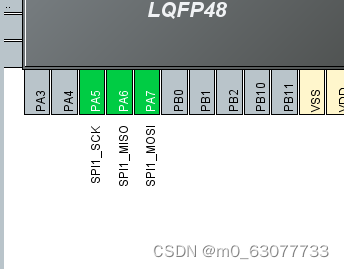
在右边图中找到 SPI1 NSS 对应引脚,选择
GPIO_Output。

修改输出高电平
High【因为SS是低电平有效,所以初始化为高电平】

2.MDK例程分析


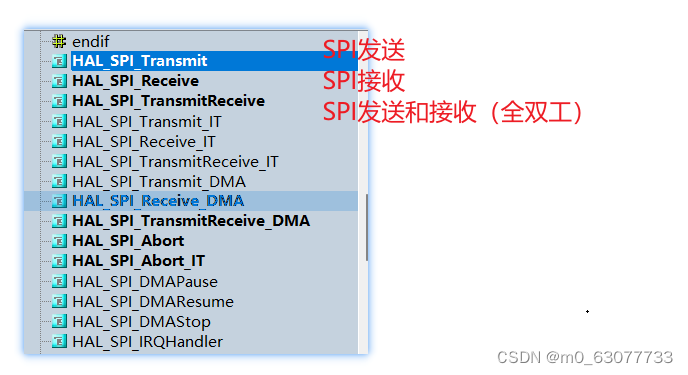
3.HAL库中SPI库函数分析
4.SPIFlash驱动分析
https://www.cnblogs.com/wenhao-Web/p/13827313.html
STM32F405+CubeMX HAL库读写W25Q64 SPI Flash例程_hal库spi例程-CSDN博客
W25Q64写可跨页数据
1)SPIFlash允许跨页读,不允许跨页写
2)SPIFlash写的时候,单次写是不能跨页的
#include "main.h"
#include "stm32f4xx_hal.h"SPI_HandleTypeDef hspi1;#define CS_PIN GPIO_PIN_4
#define CS_PORT GPIOA#define PAGE_SIZE 256 // 假设一页的大小为256字节void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_SPI1_Init(void);void W25Q64_WriteData(uint8_t* dataBuffer, uint32_t address, uint32_t dataSize);int main(void)
{HAL_Init();SystemClock_Config();MX_GPIO_Init();MX_SPI1_Init();// 允许片选引脚HAL_GPIO_WritePin(CS_PORT, CS_PIN, GPIO_PIN_RESET);// 写入数据的缓冲区uint8_t dataBuffer[512]; // 假设写入512字节的数据// 从地址0开始写入数据W25Q64_WriteData(dataBuffer, 0, sizeof(dataBuffer));// 关闭片选引脚HAL_GPIO_WritePin(CS_PORT, CS_PIN, GPIO_PIN_SET);while (1){// Your application code here}
}// 写入数据的函数
void W25Q64_WriteData(uint8_t* dataBuffer, uint32_t address, uint32_t dataSize)
{uint32_t currentPage, remainingBytes;// 计算当前页和剩余字节数currentPage = address / PAGE_SIZE;remainingBytes = dataSize;// 写入整页数据while (remainingBytes >= PAGE_SIZE) {// 发送写使能命令uint8_t writeEnableCommand = 0x06;HAL_SPI_Transmit(&hspi1, &writeEnableCommand, 1, HAL_MAX_DELAY);// 发送写命令和地址uint8_t writeCommand[] = {0x02, (uint8_t)((address >> 16) & 0xFF), (uint8_t)((address >> 8) & 0xFF), (uint8_t)(address & 0xFF)};HAL_SPI_Transmit(&hspi1, writeCommand, sizeof(writeCommand), HAL_MAX_DELAY);// 发送数据HAL_SPI_Transmit(&hspi1, dataBuffer, PAGE_SIZE, HAL_MAX_DELAY);// 等待写入完成while (W25Q64_IsWriteInProgress()) {HAL_Delay(1);}// 更新地址和剩余字节数address += PAGE_SIZE;dataBuffer += PAGE_SIZE;remainingBytes -= PAGE_SIZE;}// 写入剩余字节if (remainingBytes > 0) {// 发送写使能命令uint8_t writeEnableCommand = 0x06;HAL_SPI_Transmit(&hspi1, &writeEnableCommand, 1, HAL_MAX_DELAY);// 发送写命令和地址uint8_t writeCommand[] = {0x02, (uint8_t)((address >> 16) & 0xFF), (uint8_t)((address >> 8) & 0xFF), (uint8_t)(address & 0xFF)};HAL_SPI_Transmit(&hspi1, writeCommand, sizeof(writeCommand), HAL_MAX_DELAY);// 发送剩余数据HAL_SPI_Transmit(&hspi1, dataBuffer, remainingBytes, HAL_MAX_DELAY);// 等待写入完成while (W25Q64_IsWriteInProgress()) {HAL_Delay(1);}}
}// 检查写入是否仍在进行中
int W25Q64_IsWriteInProgress(void)
{uint8_t statusReg;// 发送读取状态寄存器命令uint8_t readStatusCommand = 0x05;HAL_SPI_Transmit(&hspi1, &readStatusCommand, 1, HAL_MAX_DELAY);// 读取状态寄存器HAL_SPI_Receive(&hspi1, &statusReg, 1, HAL_MAX_DELAY);// 检查忙位 (Bit 0)return (statusReg & 0x01);
}void HAL_SPI_MspInit(SPI_HandleTypeDef* hspi)
{GPIO_InitTypeDef GPIO_InitStruct = {0};if (hspi->Instance == SPI1){__HAL_RCC_SPI1_CLK_ENABLE();__HAL_RCC_GPIOA_CLK_ENABLE();/**SPI1 GPIO Configuration PA5 ------> SPI1_SCKPA6 ------> SPI1_MISOPA7 ------> SPI1_MOSI */GPIO_InitStruct.Pin = GPIO_PIN_5|GPIO_PIN_6|GPIO_PIN_7;GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;GPIO_InitStruct.Pull = GPIO_NOPULL;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;GPIO_InitStruct.Alternate = GPIO_AF5_SPI1;HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);}
}
首先计算当前页和剩余字节数,然后循环写入整页数据。在每个循环中,它发送写使能命令,写命令和地址,然后发送数据。在每次写入后,它等待写入完成,然后更新地址和剩余字节数。最后,如果有剩余字节,它再次发送写使能命令,写命令和地址,并发送剩余的数据。函数
W25Q64_IsWriteInProgress用于检查写入是否仍在进行中。
W25Q64读可跨页数据
#include "main.h"
#include "stm32f4xx_hal.h"SPI_HandleTypeDef hspi1;#define CS_PIN GPIO_PIN_4
#define CS_PORT GPIOA#define PAGE_SIZE 256 // 假设一页的大小为256字节void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_SPI1_Init(void);void W25Q64_ReadData(uint8_t* dataBuffer, uint32_t address, uint32_t dataSize);int main(void)
{HAL_Init();SystemClock_Config();MX_GPIO_Init();MX_SPI1_Init();// 允许片选引脚HAL_GPIO_WritePin(CS_PORT, CS_PIN, GPIO_PIN_RESET);// 读取数据的缓冲区uint8_t dataBuffer[512]; // 假设读取512字节的数据// 从地址0开始读取数据W25Q64_ReadData(dataBuffer, 0, sizeof(dataBuffer));// 关闭片选引脚HAL_GPIO_WritePin(CS_PORT, CS_PIN, GPIO_PIN_SET);while (1){// Your application code here}
}// 读取数据的函数
void W25Q64_ReadData(uint8_t* dataBuffer, uint32_t address, uint32_t dataSize)
{uint32_t currentPage, remainingBytes;// 计算当前页和剩余字节数currentPage = address / PAGE_SIZE;remainingBytes = dataSize;// 读取整页数据while (remainingBytes >= PAGE_SIZE) {// 发送读命令和地址uint8_t readCommand[] = {0x03, (uint8_t)((address >> 16) & 0xFF), (uint8_t)((address >> 8) & 0xFF), (uint8_t)(address & 0xFF)};HAL_SPI_Transmit(&hspi1, readCommand, sizeof(readCommand), HAL_MAX_DELAY);// 接收数据HAL_SPI_Receive(&hspi1, dataBuffer, PAGE_SIZE, HAL_MAX_DELAY);// 更新地址和剩余字节数address += PAGE_SIZE;dataBuffer += PAGE_SIZE;remainingBytes -= PAGE_SIZE;}// 读取剩余字节if (remainingBytes > 0) {// 发送读命令和地址uint8_t readCommand[] = {0x03, (uint8_t)((address >> 16) & 0xFF), (uint8_t)((address >> 8) & 0xFF), (uint8_t)(address & 0xFF)};HAL_SPI_Transmit(&hspi1, readCommand, sizeof(readCommand), HAL_MAX_DELAY);// 接收剩余数据HAL_SPI_Receive(&hspi1, dataBuffer, remainingBytes, HAL_MAX_DELAY);}
}void HAL_SPI_MspInit(SPI_HandleTypeDef* hspi)
{GPIO_InitTypeDef GPIO_InitStruct = {0};if (hspi->Instance == SPI1){__HAL_RCC_SPI1_CLK_ENABLE();__HAL_RCC_GPIOA_CLK_ENABLE();/**SPI1 GPIO Configuration PA5 ------> SPI1_SCKPA6 ------> SPI1_MISOPA7 ------> SPI1_MOSI */GPIO_InitStruct.Pin = GPIO_PIN_5|GPIO_PIN_6|GPIO_PIN_7;GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;GPIO_InitStruct.Pull = GPIO_NOPULL;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;GPIO_InitStruct.Alternate = GPIO_AF5_SPI1;HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);}
}
W25Q64_ReadData函数首先计算当前页和剩余字节数,然后循环读取整页数据。在每个循环中,它发送读命令和地址,然后接收数据。在每次读取后,它更新地址和剩余字节数。最后,如果有剩余字节,它再次发送读命令和地址,并接收剩余的数据。
七、STM32内部Flash
1、内部flash信息
1.查数据手册的flash章节
STM32F10xxx闪存编程参考手册.pdf · 林何/STM32F103C8 - 码云 - 开源中国 (gitee.com)

正常原来程序的代码从前往后写。
所以正常额外添加的代码从后往前写,防止把原来的程序覆盖掉。
2.查MDK工程编译后的map文件
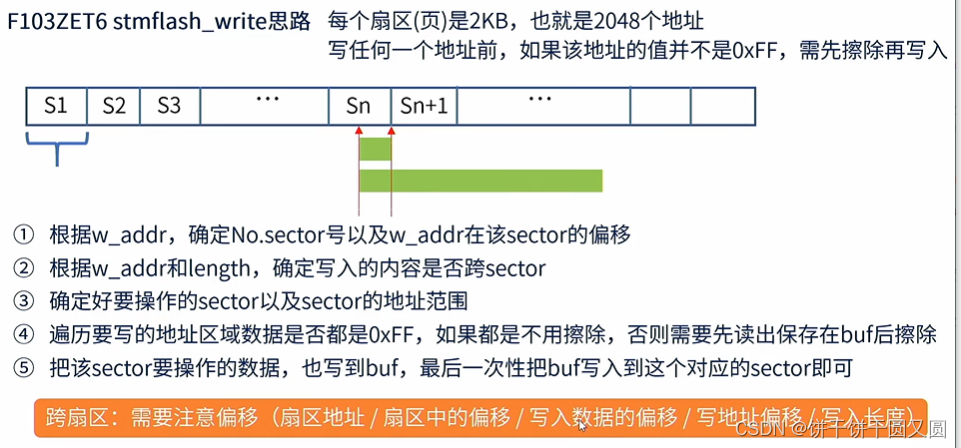
从Flash往后数9324后开始就跨页写入数据