目录
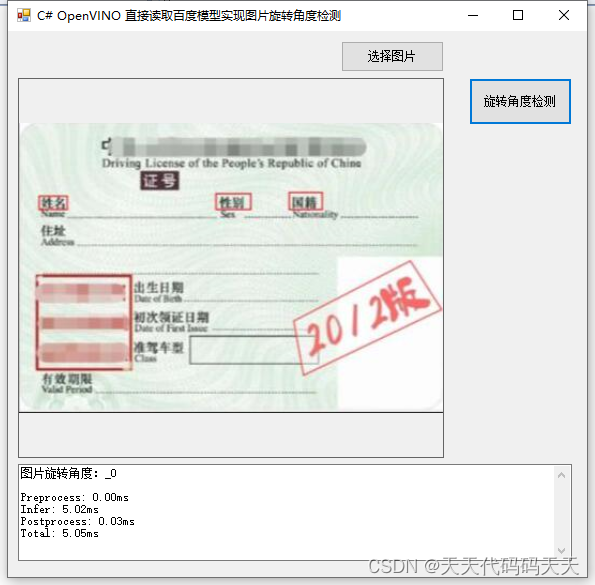
效果
模型信息
代码
下载
C# OpenVINO 直接读取百度模型实现图片旋转角度检测
效果
模型信息
Inputs
-------------------------
name:x
tensor:F32[?, 3, 224, 224]
---------------------------------------------------------------
Outputs
-------------------------
name:softmax_1.tmp_0
tensor:F32[?, 4]
---------------------------------------------------------------
项目
代码
using OpenCvSharp;
using Sdcb.OpenVINO;
using System;
using System.Diagnostics;
using System.Drawing;
using System.Linq;
using System.Text;
using System.Windows.Forms;
namespace OpenVINO_Det
{
public partial class Form1 : Form
{
public Form1()
{
InitializeComponent();
}
string fileFilter = "*.*|*.bmp;*.jpg;*.jpeg;*.tiff;*.tiff;*.png";
string image_path = "";
string startupPath;
string model_path;
Bitmap bmp;
Mat src;
StringBuilder sb = new StringBuilder();
float rotateThreshold = 0.50f;
private void button1_Click(object sender, EventArgs e)
{
OpenFileDialog ofd = new OpenFileDialog();
ofd.Filter = fileFilter;
if (ofd.ShowDialog() != DialogResult.OK) return;
pictureBox1.Image = null;
image_path = ofd.FileName;
pictureBox1.Image = new Bitmap(image_path);
textBox1.Text = "";
src = new Mat(image_path);
}
unsafe private void button2_Click(object sender, EventArgs e)
{
if (pictureBox1.Image == null)
{
return;
}
textBox1.Text = "";
sb.Clear();
src = OpenCvSharp.Extensions.BitmapConverter.ToMat(new Bitmap(pictureBox1.Image));
model_path = "model/inference.pdmodel";
Model rawModel = OVCore.Shared.ReadModel(model_path);
var ad = OVCore.Shared.AvailableDevices;
Console.WriteLine("可用设备");
foreach (var item in ad)
{
Console.WriteLine(item);
}
CompiledModel cm = OVCore.Shared.CompileModel(rawModel, "CPU");
InferRequest ir = cm.CreateInferRequest();
Stopwatch stopwatch = new Stopwatch();
Cv2.CvtColor(src, src, ColorConversionCodes.BGR2RGB);
Mat resized = Common.ResizePadding(src, 224,224);
Mat normalized = Common.Normalize(resized);
float[] input_tensor_data = Common.ExtractMat(normalized);
/*
name:x
tensor:F32[?, 3, 224, 224]
*/
Tensor input_x = Tensor.FromArray(input_tensor_data, new Shape(1, 3, 224, 224));
ir.Inputs[0] = input_x;
double preprocessTime = stopwatch.Elapsed.TotalMilliseconds;
stopwatch.Restart();
ir.Run();
double inferTime = stopwatch.Elapsed.TotalMilliseconds;
stopwatch.Restart();
Tensor output_0 = ir.Outputs[0];
RotationDegree r = RotationDegree._0;
float[] softmax = output_0.GetData<float>().ToArray();
float max = softmax.Max();
int maxIndex = Array.IndexOf(softmax, max);
if (max > rotateThreshold)
{
r = (RotationDegree)maxIndex;
}
double postprocessTime = stopwatch.Elapsed.TotalMilliseconds;
stopwatch.Stop();
double totalTime = preprocessTime + inferTime + postprocessTime;
sb.AppendLine("图片旋转角度:" + r.ToString());
sb.AppendLine();
sb.AppendLine($"Preprocess: {preprocessTime:F2}ms");
sb.AppendLine($"Infer: {inferTime:F2}ms");
sb.AppendLine($"Postprocess: {postprocessTime:F2}ms");
sb.AppendLine($"Total: {totalTime:F2}ms");
textBox1.Text = sb.ToString();
}
private void Form1_Load(object sender, EventArgs e)
{
startupPath = Application.StartupPath;
image_path = "test_img/1.jpg";
bmp = new Bitmap(image_path);
pictureBox1.Image = new Bitmap(image_path);
}
}
}
using OpenCvSharp;
using Sdcb.OpenVINO;
using System;
using System.Diagnostics;
using System.Drawing;
using System.Linq;
using System.Text;
using System.Windows.Forms;namespace OpenVINO_Det
{public partial class Form1 : Form{public Form1(){InitializeComponent();}string fileFilter = "*.*|*.bmp;*.jpg;*.jpeg;*.tiff;*.tiff;*.png";string image_path = "";string startupPath;string model_path;Bitmap bmp;Mat src;StringBuilder sb = new StringBuilder();float rotateThreshold = 0.50f;private void button1_Click(object sender, EventArgs e){OpenFileDialog ofd = new OpenFileDialog();ofd.Filter = fileFilter;if (ofd.ShowDialog() != DialogResult.OK) return;pictureBox1.Image = null;image_path = ofd.FileName;pictureBox1.Image = new Bitmap(image_path);textBox1.Text = "";src = new Mat(image_path);}unsafe private void button2_Click(object sender, EventArgs e){if (pictureBox1.Image == null){return;}textBox1.Text = "";sb.Clear();src = OpenCvSharp.Extensions.BitmapConverter.ToMat(new Bitmap(pictureBox1.Image));model_path = "model/inference.pdmodel";Model rawModel = OVCore.Shared.ReadModel(model_path);var ad = OVCore.Shared.AvailableDevices;Console.WriteLine("可用设备");foreach (var item in ad){Console.WriteLine(item);}CompiledModel cm = OVCore.Shared.CompileModel(rawModel, "CPU");InferRequest ir = cm.CreateInferRequest();Stopwatch stopwatch = new Stopwatch();Cv2.CvtColor(src, src, ColorConversionCodes.BGR2RGB);Mat resized = Common.ResizePadding(src, 224,224);Mat normalized = Common.Normalize(resized);float[] input_tensor_data = Common.ExtractMat(normalized);/*name:xtensor:F32[?, 3, 224, 224]*/Tensor input_x = Tensor.FromArray(input_tensor_data, new Shape(1, 3, 224, 224));ir.Inputs[0] = input_x;double preprocessTime = stopwatch.Elapsed.TotalMilliseconds;stopwatch.Restart();ir.Run();double inferTime = stopwatch.Elapsed.TotalMilliseconds;stopwatch.Restart();Tensor output_0 = ir.Outputs[0];RotationDegree r = RotationDegree._0;float[] softmax = output_0.GetData<float>().ToArray();float max = softmax.Max();int maxIndex = Array.IndexOf(softmax, max);if (max > rotateThreshold){r = (RotationDegree)maxIndex;}double postprocessTime = stopwatch.Elapsed.TotalMilliseconds;stopwatch.Stop();double totalTime = preprocessTime + inferTime + postprocessTime;sb.AppendLine("图片旋转角度:" + r.ToString());sb.AppendLine();sb.AppendLine($"Preprocess: {preprocessTime:F2}ms");sb.AppendLine($"Infer: {inferTime:F2}ms");sb.AppendLine($"Postprocess: {postprocessTime:F2}ms");sb.AppendLine($"Total: {totalTime:F2}ms");textBox1.Text = sb.ToString();}private void Form1_Load(object sender, EventArgs e){startupPath = Application.StartupPath;image_path = "test_img/1.jpg";bmp = new Bitmap(image_path);pictureBox1.Image = new Bitmap(image_path);}}
}
下载
源码下载