1 SOC估算方法介绍
电池SOC的估算是电池管理系统的核心,自从动力电池出现以来,各种各样的电池SOC估算方法不断出现。随着电池管理系统的逐渐升级,电池SOC估算方法的效率与精度不断提高,下面将介绍常用几种电池SOC估算方法[1],本文主要介绍扩展Kalman滤波算法(Extended Kalman Filter,EKF)。

2 EKF算法
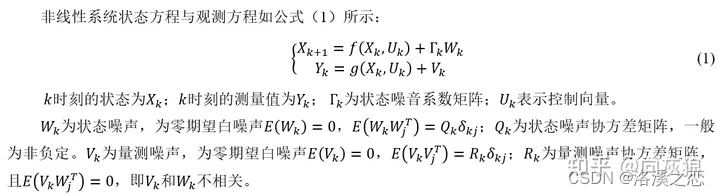
Kalman 滤波要求系统状态方程和量测方程都是线性的,但实际应用中的系统大多数是非线性的,导致Kalman滤波算法无法直接应用。因此,针对非线性模型,目前已经提出了非线性滤波算法,主要包括扩展Kalman滤波算法(Extended Kalman Filter,EKF)、无迹滤波(Unscented Kalman Filter,UKF)和粒子滤波(Particle Filter,PF)等 ,本文介绍扩展Kalman滤波算法。
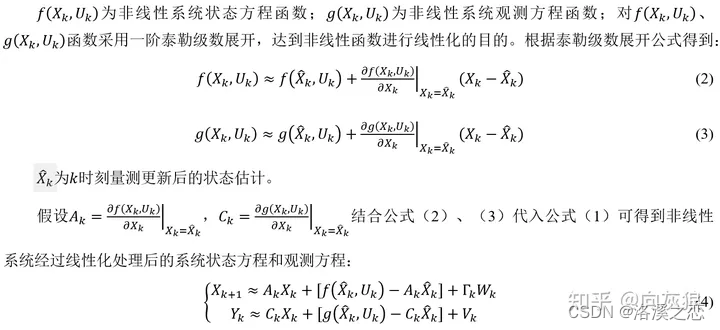
通过将非线性系统进行线性化处理后(泰勒级数展开),能够继续使用Kalman滤波(Kalman滤波算法推导过程见附录)进行状态估计的方法被称为扩展Kalman滤波算法(EKF)。

3 基于EKF算法的SOC估算方法
电池模型方程式为非线性离散系统,需要将电池模型方差式通过泰勒级数展开,对非线性系统进行线性化处理。电池模型参数可以通过Matlab/cftool工具拟合出来。
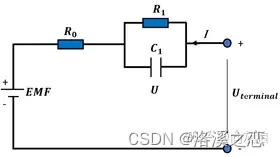
3.1 RC网络等效电路模型
RC网络等效电路模型如下图所示,在模型中,通过电阻R0来描述欧姆内阻,通过阻容网络(RC 网络)来描述极化内阻。
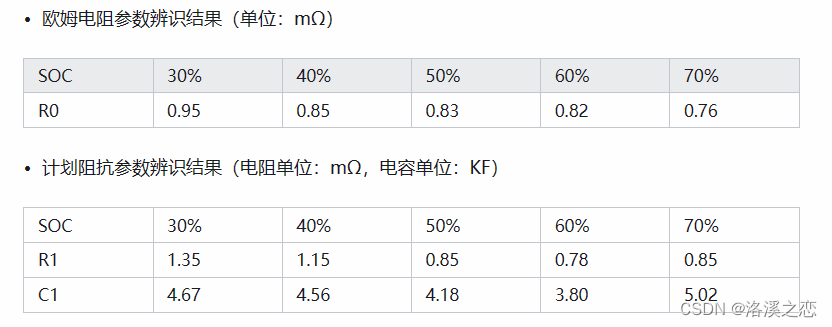
3.2 模型参数辨识
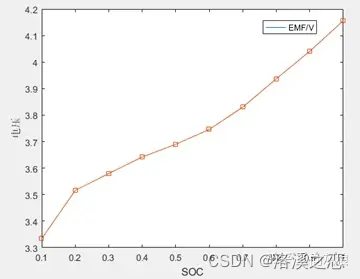
基于电芯数据,辨识如下参数: 等效电压源EMF、欧姆内阻R0、极化电容C1和极化内阻R1。模型参数的辨识方法会在后续文章中再做介绍。
等效电压源参数辨识结果(单位V)

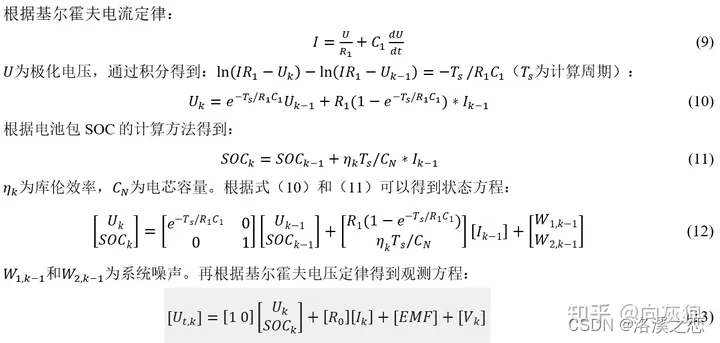
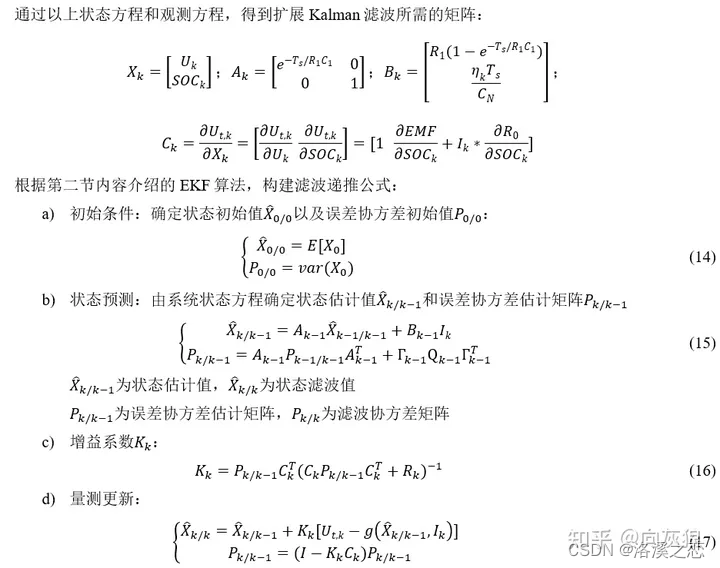
3.4 构建递推公式
4 simulink建模与仿真
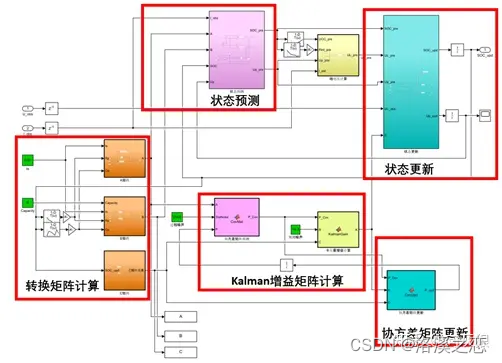
本文构建的simulink模型参考了GitHub网站上“AlterWL”的Battery_SOC_Estimation项目[2]。模型电池包NEDC工况数据作为输入参数模拟得到电芯端电压数据,将得到的电流信号与电压信号输入到EKF模块得到SOC估算值。EKF模块主要分为五个部分:
计算Kalman滤波所需的状态转换矩阵A、控制输入矩阵B和观测矩阵C。
状态预测模块:预测 时刻的SOC预估值与极化电压预估值
Kalman增益矩阵计算:根据输入信号的协方差矩阵计算加权系数
状态更新模块:根据Kalman增益矩阵计算状态更新值
协方差矩阵更新:根据Kalman增益矩阵计算协方差矩阵更新值
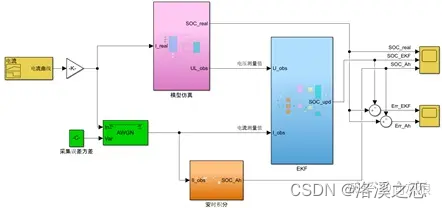
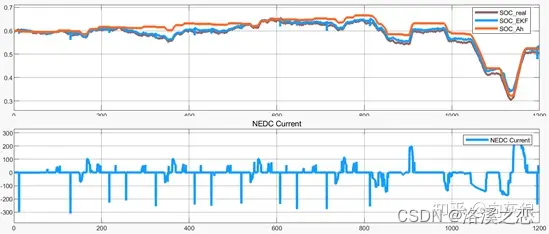
仿真结果所示,EKF算法估算得到SOC值(SOC_EKF)大部分时间内处于安时积分法SOC(SOC_Ah)和SOC真实值(SOC_real)之间。当出现大电流瞬态变化时,SOC_EKF会出现较大幅度波动,说明模型误差可能存在较大误差,需要进一步测试和验证。
5 simulink文件
https://download.csdn.net/download/u010474219/88681354




![[ffmpeg系列 02] 音视频基本知识](https://img-blog.csdnimg.cn/direct/b439c2de2a6248e1a6e7eee66c84f543.png)