1、问题背景
在调试项目的过程中,我们需要知道所搭配镜头的对焦距离、景深范围是多少,
这属于基本的项目信息,很多时候往往就因为忽略了这些小的信息,而导致一系列问题。
比如之前调试的一款化妆镜的设备,客户反馈了一个运动模糊的问题,后面才知道,他搭配模组的景深范围只要10cm,
所以拍摄目标很容易移出景深范围之外,而导致出现拍摄模糊。
详细请查看此链接:关于运动模糊问题的分析及处理方法
关于对焦距离、景深范围具体是怎么理解,怎么计算的呢?这是本文要总结的内容。
2、问题分析
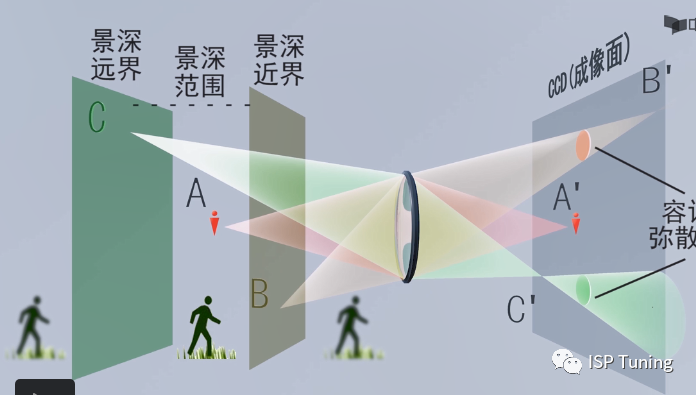
a、在分析景深之前需要了解一下弥散圆,以及容许弥散圆的概念
弥散圆,在焦点前后,光线开始聚集和扩散,点的影像变成模糊的,形成一个扩大的圆,这个圆就叫做弥散圆。
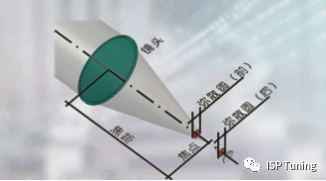
容许弥散圆,如果弥散圆的直径大于人眼的鉴别能力,在一定范围内实际影像产生的模糊是不能辨认的,
这个能辨认的最大弥散圆就称为容许弥散圆。比如,拿人眼的视力来衡量,若大于100度就需要配眼镜了。
b、景深计算公式
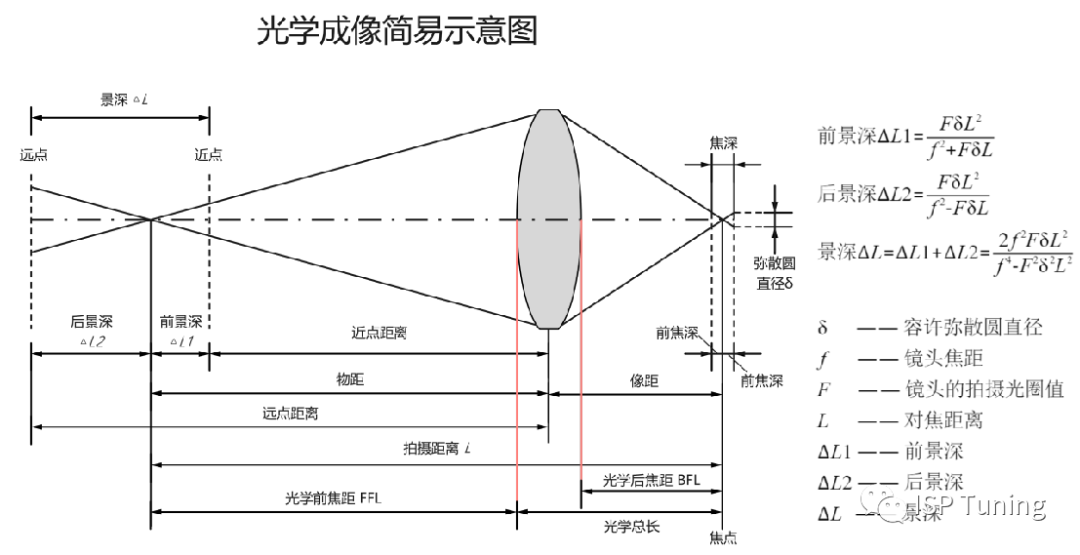
实际拍摄时 L >> f , 上面的景深公式可化简为,△L ≈
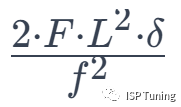
所以从公式可知,景深范围和光圈、物距、焦距的关系是:
1)与光圈数成正比,即光圈越大,景深越小;
2)与物距成正比,即物距越大,景深越大;
3)与焦距成反比,即焦距越大,景深越小;
在摄影中,实际应用中通常都是通过调整光圈,来控制景深,因物距和焦距会改变构图。
c、在项目中的实际应用
在实际项目中,我们也不用自己算的,只需要让模组厂提供一个景深表,
景深表中包含了不同对焦距离,所对应的景深范围,我们只要根据我们实际产品的应用需求,
选择合适的一个对焦距离、景深范围就可以了。

也可以用此景深表来计算其他项目的景深范围,表中都附计算公式,
只要输出 pixel size、EFL(有效焦距)、Fno(光圈数),就可以得到此项目的景深表。
解释一下景深表中的参数概念,及相关计算公式:
1)pixel size 需要在 sensor datasheet 中去查找
2)EFL(有效焦距)、Fno(光圈数),需要在镜头的规格书中去查找
3)弥散圆直径,是 pixel size x 2,我的理解是这就是容许弥散圆直径,根据奈奎斯特采样定理,
采样率需大于信号频率的2倍,才能完整采样,所以容许弥散圆直径就是 pixel size x 2 。
4)入瞳直径,是 f / Fno,就是有效通光孔径 D,光圈的计算公式是,Fno = f /D
5)超焦距,指的是当镜头对焦在无穷远时,景深近景位置到镜头的距离。
6)远景位置,近景位置,远景位置-近景位置就是景深范围,实际计算就是 L- △L1 ,L- △L2 。
7)像距,根据高斯公式 1/l +1/l' = 1/f 来计算的, l' = f*l / l -f
8)容许倍数,还不太清楚是什么。
上图中的景深表,可从此链接获取:
https://t.zsxq.com/15Idd0NS8