【专栏】数据结构复习之路
这篇文章来自上述专栏中的一篇文章的节选:
【数据结构复习之路】图(严蔚敏版)两万余字&超详细讲解
想了解更多图论的知识,可以去看看本专栏
Dijkstra 算法讲解:
迪杰斯特拉算法(Dijkstra)是由荷兰计算机科学家狄克斯特拉于1959年提出的,因此又叫狄克斯特拉算法。是从一个顶点到其余各顶点的最短路径算法,解决的是有权图中最短路径问题。迪杰斯特拉算法主要特点是:从起始点开始,采用贪心算法的策略,每次遍历到始点距离最近且未访问过的顶点的邻接节点,直到扩展到终点为止。
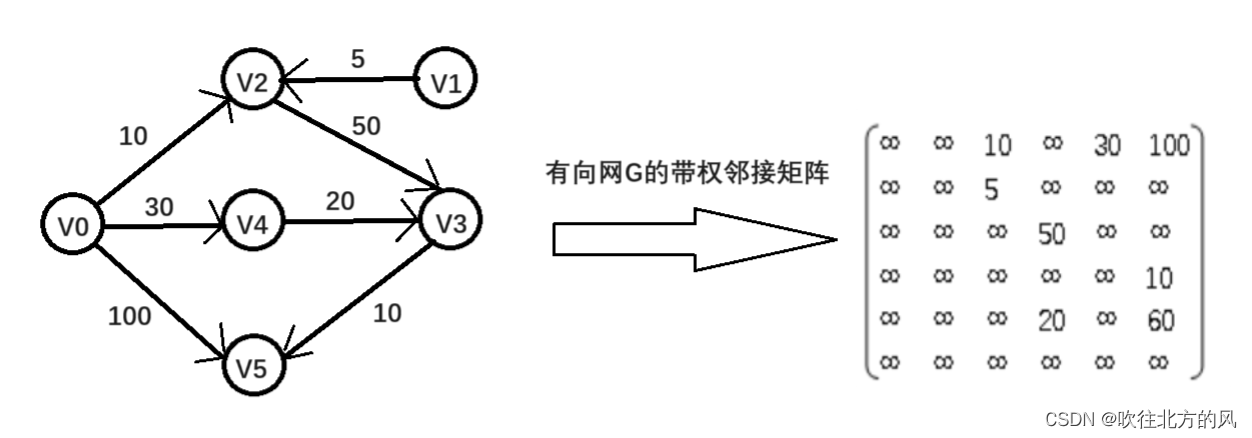
这里我直接以书P189那个例子为基础进行讲解(附带书上的源代码)
先给出算法代码,然后结合着代码来讲可能会更容易理解:
/* 迪杰斯特拉(Dijkstra) 算法*/
void ShortestPath_Dijkstra(MGraph G, int v0, Patharc path, ShortPathTable dist)
{int v, w, k, min;int final[MaxVerterNum]; // final[w] = 1表示求得顶点 v0 至 vw的最短路径,即已访问过顶点vwfor (v = 0; v < G.vexNum; v++){final[v] = 0; // 全部顶点初始化为未知最短路径状态dist[v] = G.Edge[v0][v]; // 将与v0点有连线的顶点加上权值path[v] = -1; // 初始化路劲数组p为-1}dist[0] = 0; // v0至v0路径为0final[0] = 1; // v0至v0不需要路径/* 开始主循环,每次求得v0到某个顶点v的最短路径*/for (v = 1; v < G.vexNum; v++){min = INFINITY; // 当前所知离v0顶点的最近距离for (w = 0; w < G.vexNum; w++) // 寻找离v0最近的顶点{if (!final[w] && dist[w] < min){k = w;min = dist[w]; // w顶点离v0顶点更近}}final[k] = 1; // 将目前找到的最近的顶点置为1for (w = 0; w < G.vexNum; w++) // 修正当前最短路径及距离{/* 如果经过v顶点的路径比现在这条路径的长度短的话 */if (!final[w] && (min + G.Edge[k][w] < dist[w])){dist[w] = min + G.Edge[k][w]; // 修改当前路径长度path[w] = k;}}}
}【1】初始化(执行上述代码前面一部分)
⚠️注意:这里的path[2] 、path[4]、path[5]没有初始化为0,主要是没必要,因为path[i] = -1,就表明 i 的前驱结点一定就是V0。
- final[i]:标记各顶点是否已找到最短路径
- dist[i]:最短路径长度
- path[i]:路径上的前驱
int v, w, k, min;int final[MaxVerterNum]; // final[w] = 1表示求得顶点 v0 至 vw的最短路径,即已访问过顶点vwfor (v = 0; v < G.vexNum; v++){final[v] = 0; // 全部顶点初始化为未知最短路径状态dist[v] = G.Edge[v0][v]; // 将与v0点有连线的顶点加上权值path[v] = -1; // 初始化路劲数组p为-1}dist[0] = 0; // v0至v0路径为0final[0] = 1; // v0至v0不需要路径
【2】找到距离V0最近的顶点,并修改当前路径长度
/* 开始主循环,每次求得v0到某个顶点v的最短路径*/for (v = 1; v < G.vexNum; v++){min = INFINITY; // 当前所知离v0顶点的最近距离for (w = 0; w < G.vexNum; w++) // 寻找离v0最近的顶点{if (!final[w] && dist[w] < min){k = w;min = dist[w]; // w顶点离v0顶点更近}}final[k] = 1; // 将目前找到的最近的顶点置为1for (w = 0; w < G.vexNum; w++) // 修正当前最短路径及距离{/* 如果经过v顶点的路径比现在这条路径的长度短的话 */if (!final[w] && (min + G.Edge[k][w] < dist[w])){dist[w] = min + G.Edge[k][w]; // 修改当前路径长度path[w] = k;}}}
【3】 重复【2】
 【4】重复【2】
【4】重复【2】

【5】重复【2】

到这里,dist[i]里面存的就是从V0到 Vi 的最短路径长度,而通过path[i] 就能找到最短路径。
这里V1至始至终都没有更新的原因是:V0根本走不到V1。
看完上述图解,那么书上P190那个表格你肯定就明了:
下图的S相当于 final[i]依次被确定为1的次序

这个表格建议大家要搞懂!可能有些学校会考察画图哦
⚠️注意:
迪杰斯特拉算法适用于求正权有向图中,源点到其余各个节点的最短路径。(图中可以有环,但不能有负权边)。
例如:如下图就不能使用迪杰斯特拉算法求节点 1 到其余各个节点的最短距离。

因为根据迪杰斯特拉算法,首先会更新dist[2] = 1 , final[2] = 1。由于final[2]被确定为1,即之后将不会再更新dist[2],而根据上图,显然结点1到结点2的最短路径为-1。
显然,Dijkstra 算法是基于贪心策略的。使用邻接矩阵或者带权的邻接表表示时,时间复杂度都是:
这里的V是图里面的结点个数。
人们可能只希望找到从源点到某个特定顶点的最短路径,但这个问题和求解源点到其他所有顶点的最短路径一样复杂,时间复杂度也为
我的个人博客,欢迎访问!