文章目录
- 前言
- 1 数据处理
- 1.1 Dataset
- 1.2 DataLoader
前言
在训练神经网络的过程中需要用到很多的工具,最重要的是数据处理、可视化和GPU加速。本章主要介绍PyTorch在这些方面常用的工具模块,合理使用这些工具可以极大地提高编程效率。
由于内容较多,本文分成了五篇文章(1)数据处理(2)预训练模型(3)TensorBoard(4)Visdom(5)CUDA与小结。
整体结构如下:
- 1 数据处理
- 1.1 Dataset
- 1.2 DataLoader
- 2 预训练模型
- 3 可视化工具
- 3.1 TensorBoard
- 3.2 Visdom
- 4 使用GPU加速:CUDA
- 5 小结
全文链接:
- PyTorch中常用的工具(1)数据处理
- PyTorch常用工具(2)预训练模型
- PyTorch中常用的工具(3)TensorBoard
- PyTorch中常用的工具(4)Visdom
- PyTorch中常用的工具(5)使用GPU加速:CUDA
1 数据处理
解决深度学习问题的过程中,往往需要花费大量的精力去处理数据,包括图像、文本、语音或其他二进制数据等。数据的处理对训练神经网络来说十分重要,良好的数据处理不仅会加速模型训练,而且会提高模型效果。考虑到这一点,PyTorch提供了几个高效便捷的工具,帮助使用者进行数据处理、数据增强等操作,同时可以通过并行化加速数据加载的过程。
1.1 Dataset
在PyTorch中,数据加载可以通过自定义的数据集对象实现。数据集对象被抽象为Dataset类,实现自定义的数据集需要继承Dataset,并实现以下两个Python魔法方法。
__getitem__():返回一条数据,或一个样本。obj[index]等价于obj.__getitem__(index)。__len__():返回样本的数量。len(obj)等价于obj.__len__()。
下面以Kaggle经典挑战赛"Dogs vs. Cats"的数据为例,详细讲解如何进行数据预处理。"Dogs vs. Cats"是一个分类问题,它的任务是判断一张图片是狗还是猫。在该问题中,所有图片都存放在一个文件夹下,可以根据文件名的前缀得到它们的标签值(狗或者猫)。
In: %env LS_COLORS = None !tree --charset ascii data/dogcat/
Out: env: LS_COLORS=Nonedata/dogcat/|-- cat.12484.jpg|-- cat.12485.jpg|-- cat.12486.jpg|-- cat.12487.jpg|-- dog.12496.jpg|-- dog.12497.jpg|-- dog.12498.jpg`-- dog.12499.jpg0 directories, 8 files
In: import torch as tfrom torch.utils.data import Datasetprint(t.__version__)
Out: 1.8.0
In: import osfrom PIL import Imageimport numpy as npclass DogCat(Dataset):def __init__(self, root):imgs = os.listdir(root)# 所有图片的绝对路径# 这里不实际加载图片,只是指定路径,当调用__getitem__时才会真正读取图片self.imgs = [os.path.join(root, img) for img in imgs]def __getitem__(self, index):img_path = self.imgs[index]# dog->1, cat->0label = 1 if 'dog' in img_path.split('/')[-1] else 0pil_img = Image.open(img_path)array = np.asarray(pil_img)data = t.tensor(array)return data, labeldef __len__(self):return len(self.imgs)
In: dataset = DogCat('./data/dogcat/')img, label = dataset[0] # 相当于调用dataset.__getitem__(0)for img, label in dataset:print(img.size(), img.float().mean(), label)
Out: torch.Size([374, 499, 3]) tensor(115.5177) 0torch.Size([377, 499, 3]) tensor(151.7174) 1torch.Size([400, 300, 3]) tensor(128.1550) 1torch.Size([499, 379, 3]) tensor(171.8085) 0torch.Size([375, 499, 3]) tensor(116.8139) 1torch.Size([500, 497, 3]) tensor(106.4915) 0torch.Size([375, 499, 3]) tensor(150.5079) 1torch.Size([236, 289, 3]) tensor(130.3004) 0
上面的代码讲解了如何定义自己的数据集,并对数据集进行遍历。然而,这里返回的数据并不适合实际使用,主要存在以下两个问题。
-
返回样本的形状不统一,也就是每张图片的大小不一样,这对于按batch训练的神经网络来说很不友好。
-
返回样本的数值较大,没有进行归一化。
针对上述问题,PyTorch提供了torchvision工具包。torchvision是一个视觉工具包,它提供了很多视觉图像处理的工具,其中transforms模块提供了一系列数据增强的操作。本章仅对它的部分操作进行介绍,完整内容可参考官方相关文档。
仅支持PIL Image对象的常见操作如下。
-
RandomChoice:在一系列transforms操作中随机执行一个操作。 -
RandomOrder:以随意顺序执行一系列transforms操作。
仅支持Tensor对象的常见操作如下。
Normalize:标准化,即减去均值,除以标准差。RandomErasing:随机擦除Tensor中一个矩形区域的像素。ConvertImageDtype:将Tensor转换为指定的类型,并进行相应的缩放。
PIL Image对象与Tensor对象相互转换的操作如下。
ToTensor:将 H × W × C H\times W\times C H×W×C形状的PIL Image对象转换成形状为 C × H × W C\times H\times W C×H×W的Tensor,同时会自动将[0, 255]归一化至[0, 1]。ToPILImage:将Tensor转为PIL Image对象。
既支持PIL Image对象,又支持Tensor对象的常见操作如下。
-
Resize:调整图片尺寸。 -
CenterCrop、RandomCrop、RandomResizedCrop、FiveCrop: 按照不同规则对图像进行裁剪。 -
RandomAffine:随机进行仿射变换,保持图像中心不变。 -
RandomGrayscale:随机将图像变为灰度图。 -
RandomHorizontalFlip、RandomVerticalFlip、RandomRotation:随机水平翻转、垂直翻转、旋转图像。
如果需要对图片进行多个操作,那么可以通过transforms.Compose将这些操作拼接起来,这点类似于nn.Sequential**。注意,这些操作定义后以对象的形式存在,真正使用时需要调用__call__方法,这点类似于nn.Module。**例如,要将图片的大小调整至 224 × 224 224\times 224 224×224,首先应构建操作trans = Resize((224, 224)),然后调用trans(img)。下面使用transforms的这些操作来优化上面的Dataset:
In: import osfrom PIL import Imageimport numpy as npfrom torchvision import transforms as Ttransform = T.Compose([T.Resize(224), # 缩放图片(Image),保持长宽比不变,最短边为224像素T.CenterCrop(224), # 从图片中间切出224×224的图片T.ToTensor(), # 将图片(Image)转成Tensor,归一化至[0, 1]T.Normalize(mean=[.5, .5, .5], std=[.5, .5, .5]) # 标准化至[-1, 1],规定均值和标准差])class DogCat(Dataset):def __init__(self, root, transforms=None):imgs = os.listdir(root)self.imgs = [os.path.join(root, img) for img in imgs]self.transforms = transformsdef __getitem__(self, index):img_path = self.imgs[index]label = 0 if 'dog' in img_path.split('/')[-1] else 1data = Image.open(img_path)if self.transforms:data = self.transforms(data)return data, labeldef __len__(self):return len(self.imgs)dataset = DogCat('./data/dogcat/', transforms=transform)img, label = dataset[0]for img, label in dataset:print(img.size(), label)
Out: torch.Size([3, 224, 224]) 1torch.Size([3, 224, 224]) 0torch.Size([3, 224, 224]) 0torch.Size([3, 224, 224]) 1torch.Size([3, 224, 224]) 0torch.Size([3, 224, 224]) 1torch.Size([3, 224, 224]) 0torch.Size([3, 224, 224]) 1
除了上述操作,transforms还可以通过Lambda封装自定义的转换策略。例如,如果要对PIL Image对象进行随机旋转,那么可以写成:trans = T.Lambda(lambda img: img.rotate(random() * 360))。
与torch.nn以及torch.nn.functional类似,torchvision将transforms分解为torchvision.transforms以及torchvision.transforms.functional。相比于transforms,transforms.functional为用户提供了更加灵活的操作,读者在使用时需要自己指定所有的参数。部分transforms.functional提供的操作如下,完整内容可参考官方文档。
adjust_brightness,adjust_contrast:调整图像的亮度、对比度。crop,center_crop,five_crop,ten_crop:对图像按不同规则进行裁剪。normalize:标准化,即减均值,除以标准差。to_tensor:将PIL Image对象转成Tensor。
可以看出,transforms.functional中的操作与transforms十分类似。相对于transforms而言,transforms.functional可以对多个对象以相同的参数进行操作,举例说明如下:
import torchvision.transforms.functional as TF
import randomdef transforms_rotate(image1, image2):angle = random.randint(0, 360)image1 = TF.rotate(image1, angle)image2 = TF.rotate(image2, angle)return image1, image2
除了对数据进行增强操作的transforms,torchvision还预先实现了常用的dataset,包括前面使用过的CIFAR-10,以及ImageNet、COCO、MNIST、LSUN等数据集,用户可以通过诸如torchvision.datasets.CIFAR10的命令进行调用,具体使用方法请参考官方文档。本节介绍一个读者会经常使用到的Dataset——ImageFolder,它的实现和上述的DogCat十分类似。ImageFolder假设所有的图片按文件夹保存,每个文件夹下存储同一个类别的图片,文件夹名为类名,它的构造函数如下:
ImageFolder(root, transform=None, target_transform=None, loader=default_loader, is_valid_file=None)
它主要有以下五个参数。
root:在root指定的路径下寻找图片。transform:对PIL Image进行相关数据增强,transform的输入是使用loader读取图片的返回对象。target_transform:对label的转换。loader:指定加载图片的函数,默认操作是读取为PIL Image对象。is_valid_file:获取图像路径,检查文件的有效性。
在生成数据的label时,首先按照文件夹名进行顺序排序,然后将文件夹名保存为字典,即{类名:类序号(从0开始)}。一般来说,最好直接将文件夹命名为从0开始的数字,这样会和ImageFolder实际的label一致。如果不是这种命名规范,那么建议通过self.class_to_idx属性了解label和文件夹名的映射关系。
In: !tree --charset ASCII data/dogcat_2/
Out: data/dogcat_2/|-- cat| |-- cat.12484.jpg| |-- cat.12485.jpg| |-- cat.12486.jpg| `-- cat.12487.jpg`-- dog|-- dog.12496.jpg|-- dog.12497.jpg|-- dog.12498.jpg`-- dog.12499.jpg2 directories, 8 files
In: from torchvision.datasets import ImageFolderdataset = ImageFolder('data/dogcat_2/')# cat文件夹的图片对应label 0,dog对应1dataset.class_to_idx
Out: {'cat': 0, 'dog': 1}
In: # 所有图片的路径和对应的labeldataset.imgs
Out: [('data/dogcat_2/cat/cat.12484.jpg', 0),('data/dogcat_2/cat/cat.12485.jpg', 0),('data/dogcat_2/cat/cat.12486.jpg', 0),('data/dogcat_2/cat/cat.12487.jpg', 0),('data/dogcat_2/dog/dog.12496.jpg', 1),('data/dogcat_2/dog/dog.12497.jpg', 1),('data/dogcat_2/dog/dog.12498.jpg', 1),('data/dogcat_2/dog/dog.12499.jpg', 1)]
In: # 没有任何的transforms操作,所以返回的还是PIL Image对象print(dataset[0][1]) # 第一维是第几张图,第二维为1返回labeldataset[0][0] # 第二维为0返回图片数据
Out: 0

In: # 加上transformstransform = T.Compose([T.RandomResizedCrop(224),T.RandomHorizontalFlip(), # 水平翻转T.ToTensor(),T.Normalize(mean=[.5, .5, .5], std=[.5, .5, .5]),])
In: dataset = ImageFolder('data/dogcat_2/', transform=transform)# 深度学习中图片数据一般保存成C×H×W,即通道数×图片高×图片宽dataset[0][0].size()
Out: torch.Size([3, 224, 224])
In: to_img = T.ToPILImage()# 0.2和0.4是标准差和均值的近似to_img(dataset[0][0] * 0.2 + 0.4)

1.2 DataLoader
Dataset只负责数据的抽象,调用一次__getitem__返回一个样本。然而,在训练神经网络时,一次处理的对象是一个batch的数据,同时还需要对一批数据进行打乱顺序和并行加速等操作。考虑到这一点,PyTorch提供了DataLoader实现这些功能。
DataLoader的定义如下:
DataLoader(dataset, batch_size=1, shuffle=False, sampler=None, batch_sampler=None, num_workers=0, collate_fn=None, pin_memory=False, drop_last=False, timeout=0, worker_init_fn=None, multiprocessing_context=None, generator=None, *, prefetch_factor=2, persistent_workers=False)
它主要有以下几个参数。
dataset:加载的数据集(Dataset对象)。batch_size:一个batch的大小。shuffle:是否将数据打乱。sampler:样本抽样,后续会详细介绍。batch_sampler:与sampler类似,一次返回一个batch的索引(该参数与batch_size、shuffle、sampler和drop_last不兼容)。num_workers:使用多进程加载的进程数,0代表不使用多进程。collate_fn: 如何将多个样本数据拼接成一个batch,一般使用默认的拼接方式即可。pin_memory:是否将数据保存在pin memory区,pin memory中的数据转移到GPU速度更快。drop_last:dataset中的数据个数可能不是batch_size的整数倍,若drop_last为True,则将多出来不足一个batch的数据丢弃。timeout:进程读取数据的最大时间,若超时则丢弃数据。worker_init_fn:每个worker的初始化函数。prefetch_factor:每个worker预先加载的样本数。
下面举例说明DataLoader的使用方法:
In: from torch.utils.data import DataLoaderdataloader = DataLoader(dataset, batch_size=3, shuffle=True, num_workers=0, drop_last=False)dataiter = iter(dataloader)imgs, labels = next(dataiter)imgs.size() # batch_size, channel, height, width
Out: torch.Size([3, 3, 224, 224])
DataLoader是一个可迭代(iterable)对象,可以像使用迭代器一样使用它,例如:
for batch_datas, batch_labels in dataloader:train()
或
dataiter = iter(dataloader)
batch_datas, batch_labels = next(dataiter)
在数据处理中,有时会出现某个样本无法读取等问题,例如某张图片损坏。此时在__getitem__函数中会抛出异常,最好的解决方案是将出错的样本剔除。如果不便于处理这种情况,那么可以返回None对象,然后在Dataloader中实现自定义的collate_fn,将空对象过滤掉。注意,这种情况下DataLoader返回的一个batch的样本数目会少于batch_size。
In: class NewDogCat(DogCat): # 继承前面实现的DogCat数据集def __getitem__(self, index):try:# 调用父类的获取函数,即 DogCat.__getitem__(self, index)return super().__getitem__(index)except:return None, Nonefrom torch.utils.data.dataloader import default_collate # 导入默认的拼接方式def my_collate_fn(batch):'''batch是一个list,每个元素是dataset的返回值,形如(data, label)'''# 过滤为None的数据batch = [_ for _ in batch if _[0] is not None]if len(batch) == 0: return t.Tensor()return default_collate(batch) # 用默认方式拼接过滤后的batch数据
In: dataset = NewDogCat('data/dogcat_wrong/', transforms=transform)dataset[8]
Out: (None, None)
In: dataloader = DataLoader(dataset, 2, collate_fn=my_collate_fn, num_workers=0, shuffle=True)for batch_datas, batch_labels in dataloader:print(batch_datas.size(), batch_labels.size())
Out: torch.Size([1, 3, 224, 224]) torch.Size([1])torch.Size([2, 3, 224, 224]) torch.Size([2])torch.Size([2, 3, 224, 224]) torch.Size([2])torch.Size([2, 3, 224, 224]) torch.Size([2])torch.Size([1, 3, 224, 224]) torch.Size([1])
从上述输出中可以看出,第1个batch的batch_size为1,这是因为有一张图片损坏,无法正常返回。最后1个batch的batch_size也为1,这是因为共有9张(包括损坏的文件)图片,无法整除2(batch_size),所以最后一个batch的样本数目小于batch_size。
对于样本损坏或数据集加载异常等情况,还可以通过其他方式解决,例如随机取一张图片代替出现异常的图片:
class NewDogCat(DogCat):def __getitem__(self, index):try:return super().__getitem__(index)except:new_index = random.randint(0, len(self) - 1)return self[new_index]
相比于丢弃异常图片而言,这种做法会更好一些,它能保证每个batch的样本数目仍然是batch_size,但是在大多数情况下,最好的方式还是对数据进行彻底清洗。
DataLoader中没有太多的魔法方法,它封装了Python的标准库Multiprocessing,能够实现多进程加速,下面对DataLoader的多进程并行原理进行简要介绍。
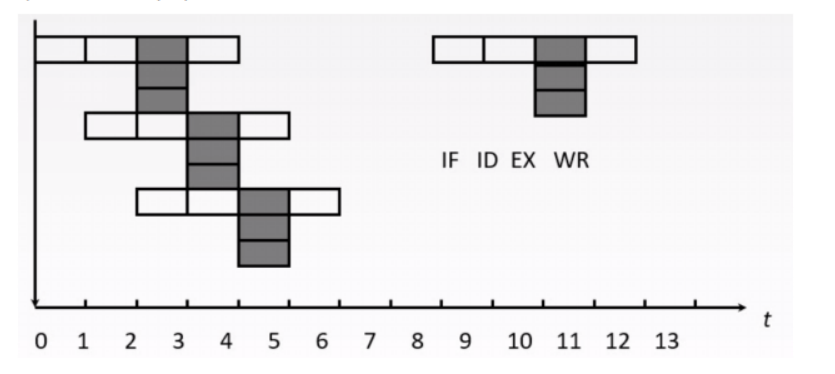
DataLoader默认使用单进程加载数据,这样的加载方式较慢,但在系统资源有限、数据集较小能够直接加载时十分推荐。这是因为在单进程的工作模式下,若发生异常,用户在调试时能够获取更多错误信息。当数据量较大时,可以通过num_workers参数进行多进程的数据读取,多进程并行流程如下图所示。

在多进程加载数据时,每一个进程都会拷贝Dataset对象,并执行_worker_loop函数。首先,主进程生成一个batch的数据索引,并保存在队列index_queue中。然后,每个子进程执行_worker_loop函数,根据index_queue在拷贝的Dataset对象中执行__getitem__函数,获取数据。最后,每个子进程将自身获取的数据放至work_result_queue队列中,通过collate_fn处理数据,最终得到一个batch的数据data_queue。重复执行上述流程,DataLoader就实现了多进程的数据加载,更多细节读者可以参考DataLoader的相关源码。
在Dataset和DataLoader的使用方面有以下建议。
-
将高负载的操作放在
__getitem__中,例如加载图片等。在多进程加载数据时,程序会并行地调用__getitem__函数,将负载高的操作放在__getitem__函数中能够实现并行加速。 -
Dataset中应当尽量仅包含只读对象,避免修改任何可变对象。在多进程加载数据时,每个子进程都会拷贝Dataset对象。如果某一个进程修改了部分数据,那么在另外一个进程的拷贝中,这部分数据并不会被修改。下面是一个不好的例子:希望self.idxs返回的结果是[0,1,2,3,4,5,6,7,8],实际上4个进程最终的self.idxs分别是[0,4,8],[1,5],[2,6],[3,7]。而dataset.idxs则是[], 因为它并未参与迭代,并行处理的是它的四个拷贝。
class BadDataset:def __init__(self):self.idxs = [] # 取数据的次数def __getitem__(self, index):self.idxs.append(index)return self.idxsdef __len__(self):return 9
dataset = BadDataset()
dl = t.utils.data.DataLoader(dataset, num_workers=4)
for item in dl:print(item) # 注意这里self.idxs的数值
print('idxs of main', dataset.idxs) # 注意这里的idxs和__getitem__返回的idxs的区别
使用Multiprocessing库时还有另外一个问题,在使用多进程加载中,如果主程序异常终止(例如使用快捷键“Ctrl+C”强行退出),那么相应的数据加载进程可能无法正常退出。虽然发现程序已经退出了,但是GPU显存和内存仍然被占用着,通过top、ps aux也能够看到已经退出的程序,这时就需要手动强行杀掉进程,建议使用如下命令:
ps x | grep <cmdline> | awk '{print $1}' | xargs kill
ps x:获取当前用户的所有进程。grep <cmdline>:找到已经停止的PyTorch程序的进程,例如通过python train.py启动程序,需要写成grep 'python train.py'。awk '{print $1}':获取进程的pid。xargs kill:杀掉进程,根据需要可能需要写成xargs kill -9强制杀掉进程。
在执行这句命令之前,建议先确认仍有未停止进程:
ps x | grep <cmdline>
PyTorch中还单独提供了一个Sampler模块,用来对数据进行采样。常用的有随机采样器RandomSampler,当DataLoader的shuffle参数为True时,系统会自动调用这个采样器打乱数据。默认的采样器是SequentialSampler,它会按顺序一个一个进行采样。这里介绍另外一个很有用的采样方法:WeightedRandomSampler,它会根据每个样本的权重选取数据,在样本比例不均衡的问题中,可用它进行重采样。
构建WeightedRandomSampler时需提供两个参数:每个样本的权重weights、选取的样本总数num_samples以及一个可选参数replacement。权重越大的样本被选中的概率越大,待选取的样本数目一般小于全部的样本数目。replacement用于指定是否可以重复选取某一个样本,默认为True,即允许在一个epoch中重复采样某一个数据。如果设为False,那么当某一类的样本被全部选取完,但样本数目仍然未达到num_samples时,sampler不会再从该类中选择数据,此时可能导致weights参数失效。下面举例说明:
In: dataset = DogCat('data/dogcat/', transforms=transform)# 假设狗的图片被取出的概率是猫的概率的两倍# 两类图片被取出的概率与weights的绝对大小无关,只和比值有关weights = [2 if label == 1 else 1 for data, label in dataset]weights
Out: [2, 1, 1, 2, 1, 2, 1, 2]
In: from torch.utils.data.sampler import WeightedRandomSamplersampler = WeightedRandomSampler(weights,\num_samples=9,\replacement=True)dataloader = DataLoader(dataset,\batch_size=3,\sampler=sampler)for datas, labels in dataloader:print(labels.tolist())
Out: [1, 1, 0][0, 1, 1][1, 1, 0]
可以看出,猫狗样本比例约为1:2。同时,一共只有8个样本,但是却返回了9个,说明有样本被重复返回,这就是replacement参数的作用。下面将replacement设为False:
In: sampler = WeightedRandomSampler(weights, 8, replacement=False)dataloader = DataLoader(dataset, batch_size=4, sampler=sampler)for datas, labels in dataloader:print(labels.tolist())
Out: [1, 0, 1, 0][1, 1, 0, 0]
在replacement为False的情况下,num_samples等于dataset的样本总数。为了不重复选取,Sampler会将每个样本都返回,weight参数不再生效。
从上面的例子中可以看出Sampler在样本采样中的作用:如果指定了Sampler,那么shuffle参数不再生效,并且sampler.num_samples会覆盖dataset的实际大小,即一个epoch返回的图片总数取决于sampler.num_samples。
本小节介绍了数据加载中两个常见的操作:Dataset与DataLoader,并结合实际数据对它们的魔法方法与底层原理进行了详细介绍。数据准备与加载是神经网络训练中最基本的环节之一,读者应该熟悉其常见操作。