目录
摘 要
Abstract
第一章:引言
1.1研究背景
1.2 研究意义
1.3文章架构
第二章:智能施药机器人发展现状
2.1引言
2.2 大田智能施药机器人发展现状
2.3 果园智能施药机器人发展现状
2.4 设施农业智能施药机器人发展现状
第三章:智能施药机器人移动平台设计
3.1引言
3.2 轮式施药机器人移动平台
3.3 履带式施药机器人移动平台
3.4 足式施药机器人移动平台
3.5 复合式施药机器人移动平台
3.6 空中施药机器人移动平台
3.7 分析与比较
第四章:智能施药机器人喷雾装置
4.1 引言
4.2 大田场景下的喷雾装置
4.3 温室场景下的喷雾装置
4.4果园场景下的喷雾装置
4.5分析与比较
第五章:智能施药机器人导航技术
5.1引言
5.2 GPS 导航
5.3 传感器导航
5.4视觉导航
5.5 激光雷达导航
5.6分析与比较
第六章:智能施药机器人智能识别技术
6.1引言
6.2红外线传感检测
6.3 超声波传感检测
6.4 激光雷达检测
6.5 机器视觉检测
6.6 光谱成像检测
6.7分析与比较
第七章:总结与展望
7.1研究目前存在的问题
7.2 未来发展方向
7.3总结
摘 要
喷施化学农药是病虫害防治最主要的手段,对保证作物的产量起着至关重要的作用。传统的施药机械工作效率低,且使用同一施药量进行连续喷施作业易造成农药浪费、环境污染。随着农业智能化发展,机器人被广泛应用到农业植保作业中,智能施药机器人以减少劳动力投入、提高农药利用率、减少农药施用量以及减少环境污染为目的,实现了更加高效、精准的病虫害防治。智能施药机器人是集复杂农业机械、智能感知、智能决策、智能控制等技术为一体的现代农业施药装备,可自主、高效、安全、可靠地完成施药作业任务。为明确智能施药机器人及关键技术的国内外研究现状,本文总结了适用于不同作业场景的施药机器人的应用进展,从智能施药机器人的移动平台设计、喷雾装置设计、导航技术、智能识别技术4个方面进行分析,结合施药机器人作业环境的复杂多变性,分析智能施药机器人关键技术的现存问题,阐述智能施药机器人未来的发展趋势是精准变量施药、自主导航以及无人化作业,以期为智能施药机器人在未来的研究提供参考。
关键词:施药机器人;智能识别;自主作业;移动平台;导航技术;喷雾装置
Abstract
The application of chemical pesticides through spraying is the primary means of controlling crop diseases and pests, playing a crucial role in ensuring crop yields. Traditional spraying machines have low working efficiency and using the same amount of pesticides for continuous spraying operations can lead to pesticide waste and environmental pollution. With the development of agricultural intelligence, robots are widely used in agricultural plant protection operations. Intelligent spraying robots aim to reduce labor input, improve pesticide utilization, reduce pesticide application, and minimize environmental pollution, achieving more efficient and precise disease and pest control. Intelligent spraying robots are modern agricultural spraying equipment integrating complex agricultural machinery, intelligent perception, decision-making, and control technologies, and can autonomously, efficiently, safely, and reliably complete spraying tasks. To clarify the current research status of intelligent spraying robots and key technologies at home and abroad, this paper summarizes the application progress of spraying robots suitable for different operating scenarios. It analyzes four aspects of intelligent spraying robots: mobile platform design, spray device design, navigation technology, and intelligent recognition technology. In combination with the complex and variable operating environment of spraying robots, the paper analyzes the existing problems of key technologies of intelligent spraying robots and describes the future development trends, which include precise variable-rate spraying, autonomous navigation, and unmanned operations, aiming to provide reference for the future research of intelligent spraying robots.
Keywords: Spraying robot; Intelligent recognition; Autonomous operation; Mobile platform; Navigation technology; Spray equipment.
第一章:引言
1.1研究背景
近年来病虫害对农业存在严重影响。农作物遭受病虫害侵袭会导致产量和质量下降,这对粮食生产以及全球粮食安全都构成了严重威胁。据联合国粮食及农业组织估计,病虫害每年导致粮食减产约为总产量的1/4,因此,有效的病虫害防治对于保障粮食安全至关重要。
另外传统的化学防治方法在应对病虫害时存在诸多问题,如农药浪费、环境污染以及对操作者健康的危害。此外,传统施药方式需要大量劳动力,并增加了农业成本,这些问题亟待解决。
2023年中央一号文件提出加强农业基础设施建设、强化农业科技与装备支撑的要求[1]。农业装备的智能化是中国农业高质量发展的主要方向之一。因此,研发智能施药机器人,满足未来农业的施药需求,具有紧迫性和重要性。
1.2 研究意义
智能施药机器人的研发对于多个方面具有重要意义。首先,它有助于提高作物产量和质量,从而确保粮食安全并提供更加优质的农产品。其次,该技术的应用有望减少农药浪费、降低环境污染,推动农业向着更加生态可持续的方向迈进。最后,智能施药机器人的研究将有助于解决传统农业施药方式中存在的劳动力短缺和安全风险问题,同时降低农业生产成本。这些方面共同突显了智能施药机器人在农业领域中的重要性以及其潜在价值。
1.3文章架构
本文探讨了近年来智能施药机器人开发的相关研究。首先介绍了智能施药机器人研究的背景、意义以及国内外的发展现状。随后,从机器人的移动平台设计、喷雾装置、导航技术和智能识别这四个技术层面评述了施药机器人的研究进展,并对这些技术进行了分析比较。这四个方面被视为智能施药机器人研究的关键环节。在此基础上,总结了现有技术的局限性,展望了智能施药机器人的发展趋势以及存在的问题,旨在为施药技术的发展提供参考。
第二章:智能施药机器人发展现状
2.1引言
施药作业经历了传统人工施药、机械化施药、自动化和智能化施药四个发展阶段。未来,智能施药机器人将成为施药作业的必然趋势。这种机器人集成了农业机械、智能感知、智能决策和智能控制等技术,可以独立、高效、安全、可靠地完成施药任务。具体来说,它会通过智能识别系统获取和处理病虫草害信息,喷雾执行系统根据作物信息定点、定量进行喷雾作业,智能导航系统生成机器人的作业路径,并控制机器人自主作业。下面将介绍三种比较常见的智能施药机器人及其国内外发展现状。
2.2 大田智能施药机器人发展现状
大田智能施药机器人是一种在农田环境下进行喷雾作业的自主装备。其核心技术包括精准导航、智能识别、智能决策、作业路径规划和智能作业控制等。其中,精确靶向作业和田间路径规划是主要难点。
在全球范围内,美国、西欧和日本在智能施药技术和装备方面处于领先地位。美国John Deere公司采用分段控制技术来避免重叠喷洒,丹麦的HARDI公司使用田间地图和可调节的风幕进行导向喷雾,实现高精度的施药。在水田施药方面,日本的丸山和井关等公司的机械代表了当前最先进的水平。而在航空施药领域,中国的大疆和极飞等公司结合中国农业地形的特点,采用载波相位差分技术、环境感知和动态变量喷施等技术取得了显著进展,并处于世界领先水平。

图2.1 可调节的风幕
2.3 果园智能施药机器人发展现状
果园中的智能施药机器人主要任务是在崎岖的地形中自主稳定行走并进行精准作业。其关键技术包括移动视角下的病虫害目标检测、机械臂作业精准控制和稳定行走设计。
在果园植保方面,常采用风送喷雾和定向仿形喷雾等技术。早在美国和日本等国就开始研究雾滴沉积分布规律、最佳粒径等对施药机器人效果的问题[2],并将这些研究成果应用于指导施药技术和机具的创新,如靶喷雾技术、静电喷雾技术和可控雾滴技术等。
当前,欧美等国的施药机器人大多具备低容量施药和智能化水平。例如,美国的ESS公司成功将静电喷雾技术应用于果园施药,实现了节水、节药、高效施药以及喷雾静电吸附效果。意大利的CAFFINI公司通过智能控制机械臂的动作,适用于防治低矮果树如葡萄树等。
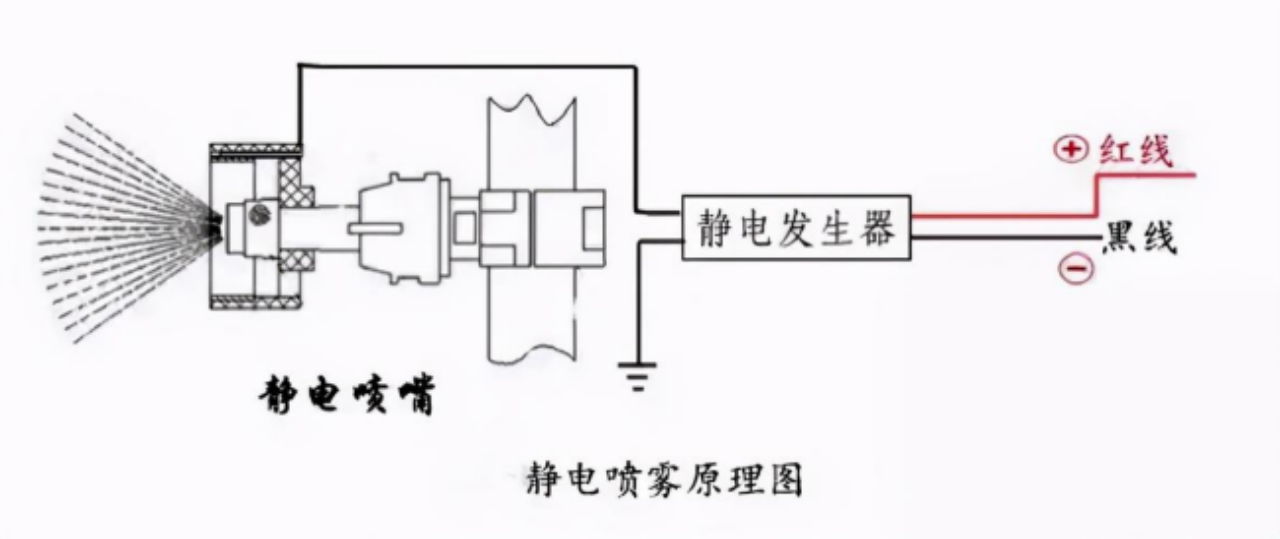 图2.2 静电喷雾原理图
图2.2 静电喷雾原理图
2.4 设施农业智能施药机器人发展现状
设施农业施药机器人主要应用于温室内作业空间相对狭小的环境。为了避免在作业过程中刮碰作物,这种机器人需要采用小型而精密的机械结构设计,并实现机械臂的精准控制和病虫害的准确识别等难点技术。
针对温室内狭小的施药空间问题,一些研究者提出了基于遗传算法的离线最优喷施算法,可以针对不同的种植模式和作物进行施药。另外,某些轨道式智能施药机器人在喷雾装置上安装了多个喷头,从而提高机器人自主进行施药作业的效率。
目前,国内智能施药机器人的研究比较晚,主要集中在科研院所,且多为试验性质。其中,一些研究成果包括采用四轮式底盘的小型施药机器人,通过单目视觉进行识别和定位,实现在作物行间冠层下方狭小空间的施药作业。此外,还有研究开发了履带式智能施药机器人,采用模糊算法(PID)控制策略,能够快速进行导航纠偏,并稳定地进行施药作业,以满足篱架型黄瓜等作物施药作业的高效、无人化和智能化需求[3]。
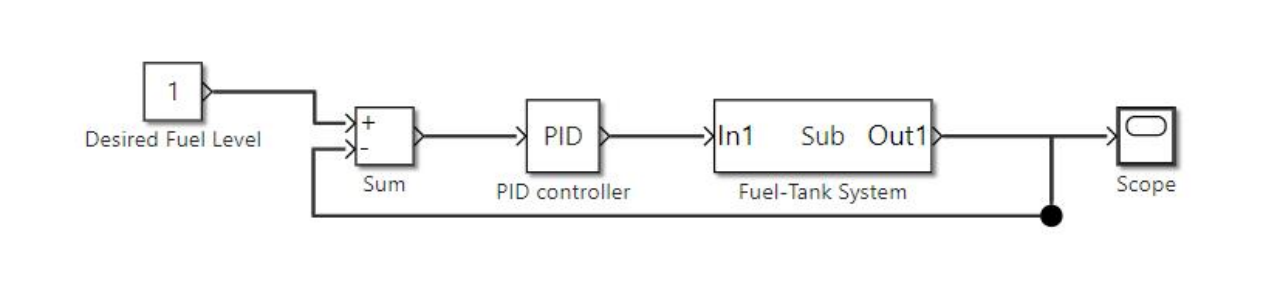
图2.2 模糊算法模型
第三章:智能施药机器人移动平台设计
3.1引言
智能施药机器人的移动平台设计是确保其在田间作业中稳定运行的重要前提。根据作业环境的不同,智能施药机器人的移动平台可以分为地面机器人和空中机器人。
对于地面机器人而言,根据不同的田间作业场景,移动平台可以采用轮式、履带式、足式和复合式等结构。轮式平台适用于平坦地面,具有快速移动和机动性的优势。履带式平台适用于崎岖地形和湿滑环境,具有更好的通过性和抓地力。足式平台模仿生物动物的移动方式,具有良好的适应性和通过能力。复合式平台结合了不同类型的轮或履带,以提供更多的灵活性和稳定性。
对于空中机器人,常见的移动平台包括旋翼飞行器(如无人机)和固定翼飞行器。这些飞行器具有自由度高、能够在三维空间快速移动的特点,能够在不受地面限制的情况下进行作业。在设计移动平台时,需要考虑机器人的重心位置、底盘结构的稳定性以及悬挂系统的设计等因素,以确保机器人在移动过程中的稳定性和可靠性,从而有效完成施药作业。
本章将介绍几种常见的智能施药机器人的移动平台设计方案,并在最后对其进行比较和分析。
3.2 轮式施药机器人移动平台
轮式施药机器人是一种成熟的设计,可采用单轮、双轮或多轮结构,并具有驱动和控制简单、负载能力大、作业效率高等优点,在施药工作中得到广泛应用。常见的机构包括三轮和四轮移动底盘。三轮移动底盘相比于四轮底盘具有更小的转向半径,更加灵活,适合应用于作业空间较小的环境。而四轮底盘则具有稳定性高、驱动和控制简单、重量轻等特点,常用于坡地等高低起伏的环境,以及温室和大棚等狭小作业环境(如图3.1所示)。
为了解决不同作物种植行间距和作物高度的问题,设计了高地隙底盘,其具有底盘离地间隙高、轮距可调、喷幅宽等特点,能够满足不同种植模式和作物类型的施药作业需求。高地隙底盘结合基于姿态测量的定位误差校正方法,能够补偿机体倾斜导致的位置测量误差,同时提高调头的准确性,实现了高地隙机械的智能施药。这些设计和技术能够提升轮式施药机器人的稳定性、适应性和作业效率,使其能够在不同作业环境中执行精准的施药任务。
图3.1 轮式移动平台(左:普通轮式、右:高地隙轮式)
3.3 履带式施药机器人移动平台
履带式施药机器人移动平台是一种以履带为基础的机器人底盘。它使用履带作为牵引系统,可以提供更大的接触面积和附着能力,从而增加摩擦力和牵引力。因此,在各种复杂地形和环境中都能够适应,并且广泛应用于温室大棚、果园、农田等领域。
在温室大棚中,传统的轮式机器人容易碰撞到作物,同时其空间限制也会使得机器人作业难度增加。而采用小型履带式底盘的施药机器人可以避免这些问题,实现无损智能施药作业。
在果园中,作物的枝叶低矮稠密,地面杂草丛生,而且地面也容易湿滑。这些都会导致传统轮式机器人在行走过程中遇到困难。而采用自走式橡胶履带底盘的机器人则具有更强的前进动力和高稳定性,能够更好地适应果园的施药作业需求(如图3.2所示)。
在丘陵山地作业中,地形起伏是机器人作业的主要难点。传统轮式机器人在爬坡能力和环境适应性方面都存在缺陷,而采用三角履带轮式结构设计的机器人底盘可以增加底盘通过性和稳定性,解决机器人在丘陵山地作业时可能遇到的爬坡能力差、环境适应性差和作业效率低等问题。
总之,不同类型的履带式底盘设计使得施药机器人能够在复杂环境中高效进行施药作业,提高了农业生产效率和质量。

图3.2 履带式移动平台(左:普通履带式、右:倒梯形履带式)
3.4 足式施药机器人移动平台
足式施药机器人移动平台是一种模仿自然界生物行走方式的底盘设计。它具有结构紧凑、越障方式灵活和适应能力强的优点(如图3.3所示)。其中,类似蜘蛛的仿生六足底盘机器人是最常见的足式底盘设计[4]。该底盘通过六条机械腿的运动实现机器人的行走,每次移动三条机械腿,确保剩下的三条机械腿总是形成一个稳定的三角形接触地面,从而减少了不稳定性,提高了环境适应性。
尽管足式底盘具有灵活性和适应性强的特点,但由于其结构复杂,对于载重能力相对较弱。在施药机器人中,为了增加单次作业时间,通常需要携带较大容量的药箱,这可能超出足式底盘的承载能力。另外,由于足式底盘的运动控制较为复杂,精确控制也存在一定的挑战。
因此,在实际应用中,足式施药机器人移动平台的设计和使用需要综合考虑载重能力、精确控制以及适应不同环境等因素。
未来的研究可以进一步探索如何提高足式底盘的载重能力和运动控制精度,以满足农田施药的需求。

图3.3 足式移动平台
3.5 复合式施药机器人移动平台
地面施药机器人中,轮式底盘和履带式底盘是两种常见形式。然而,这两种底盘都有一些缺点。例如,履带式底盘能耗大且速度慢,而轮式底盘越障能力差且稳定性不佳。
为了克服这些问题,复合式底盘施药机器人将多种底盘的优点结合起来,以适应不同环境下的施药工作。轮履式复合底盘融合了履带式底盘的越障能力和轮式底盘的转向灵活性,特别适用于果园和温室等复杂场景中的施药需求(如图3.4所示)。此外,轮足复合式底盘还能解决高大树木喷施的难题,能够高效而精准地完成施药作业。
总而言之,复合式底盘施药机器人融合了不同底盘的优势,成功地克服了单一底盘的一些缺点,使其更适用于各种复杂环境下的施药工作。

图3.4 复合式机器人
3.6 空中施药机器人移动平台
近年来,无人机在农业植保领域取得了快速发展,成为一种高效的施药工具。无人机具有生成作业路线图并实现自主变量喷施作业的能力,这使得它可以在大田中高效进行作业,不受作物生长模式和地形限制。
市场上存在着多种不同的植保无人机产品,例如深圳大疆、广州极飞、无锡汉和等公司推出的产品(如图3.5所示)。为了适应复杂地形如丘陵、盆地等地区的施药需求,这些无人机公司利用遥感技术增加了仿地飞行功能,以提高喷施的均匀性。
为了满足精准施药的要求,研究人员进行了雾滴沉积特性、覆盖度和雾滴穿透性等参数的试验研究。他们分析了不同作业条件下的最佳作业参数,以提高施药效果并减少药剂的浪费。
总体而言,无人机在农业植保领域具有巨大的潜力,可以提高施药的均匀性和准确性。通过自主变量喷施和遥感技术的应用,无人机为农作物的保护提供了高效的解决方案。

图3.5 单旋翼无人机
3.7 分析与比较
智能施药机器人的移动平台设计包括轮式、履带式、足式、复合式和空中机器人。它们各自适用于不同的作业环境和需求。根据具体任务和环境选择合适的设计能提高施药机器人的稳定性和效率。我将分析与比较的结果在表3.1中呈现。
表3.1
| 移动平台类型 | 优点 | 适用场景 |
| 轮式 | 驱动和控制简单、负载能力大、作业效率高 | 平坦地面、农田、温室、小型农作物种植区、大型仓库等 |
| 履带式 | 提供更大的接触面积和附着能力、适应复杂地形和湿滑环境 | 温室大棚、果园、丘陵山地、恶劣气候等条件下的任务 |
| 足式 | 模仿生物行走方式、具有较强的适应性 | 狭窄通道、不规则地形、特殊作业环境例如密闭空间 |
| 复合式 | 结合多种底盘的优点、适应不同环境下的施药工作 | 复杂环境、大型农田、果园、植物园等大面积作业 |
| 空中 | 不受地面限制、自主变量喷施作业、提高施药的均匀性和准确性 | 大田、丘陵、盆地等地区的农作物施药、城市公园 |
第四章:智能施药机器人喷雾装置
4.1 引言
为了满足农业生产对精准施药的需求,研究人员设计了智能施药机器人,实现了自动对靶、变量喷雾、仿形喷雾等功能,旨在解决国内植保机械和施药技术落后的问题,并减少农药滥用所带来的环境污染。
本章主要围绕大田、温室、果园等不同应用场景展开分析,总结了不同施药场景下的喷雾装置。这些装置包括可调节喷杆喷雾装置、静电喷雾装置、机械臂靶向喷雾装置、风送式喷雾装置、仿形喷雾装置等。这些装置具有不同的特点,在不同的施药场景下具有各自的优势,可以提高施药效率和精度,减少农药浪费。
4.2 大田场景下的喷雾装置
为了解决大田施药作业中底盘震动和环境风力对喷洒均匀性的影响,研究人员在施药机器人上引入了静电喷雾技术。这种技术利用感应式充电使雾滴带有正负电荷,在作物之间形成静电场,从而提高雾滴在叶片表面的吸附能力,增加雾滴沉积量和中靶率。例如,植保无人机上可以设计离心静电喷雾装置或双极接触式静电喷雾装置,以提高喷洒的均匀性和防止飘移现象。
在宽广平坦的地块中作业时,可以使用施药机器人配备大喷辐的喷杆喷雾装置,以提高施药效率。然而,在不连续的地块中,可能会产生农药的重复喷洒现象,浪费农药。为解决这一问题,可以通过实时调节喷杆的喷洒范围来避免重复喷洒。另外通过引入静电喷雾技术以及优化喷雾装置和控制系统,施药机器人在大田施药作业中可以提高施药效果、减少药量浪费,并适应不同地块的需求。
4.3 温室场景下的喷雾装置
为了在温室中进行精准喷施,避免增加湿度并减少病害的发生,施药机器人可以采用风送喷雾装置和辅助气力导流装置。然而,风送气流喷雾可能会导致较多雾滴沉积在设施结构表面[5]。为了解决这个问题,可以使用具有多自由度的机械臂和电磁阀控制喷嘴流量,实现施药机器人的局部变量喷雾,减少雾滴的逸散。例如,可以利用Kinect相机捕获植物深度图像,并根据植物体积计算来控制施药量。在需要时,施药控制系统可以展开多自由度的机械臂,以实现狭小空间内的精准喷洒。
对于大棚中爬架类瓜果的施药作业,可以设计双边双轨道四喷头机械臂,并配备静电喷嘴。静电喷嘴可以改善喷雾沉积和作业效率,提高叶片背面的液滴沉积率。这些技术的应用可以提高温室施药的精准性和效果,减少药物浪费,降低病害发生率。

图4.1 常见的球形静电喷嘴
4.4果园场景下的喷雾装置
在果园的喷施作业环境中,可以采用仿形喷雾装置来提高果树的喷施效率。这种装置利用传感器或机器学习技术获取树冠的形状、大小等信息,并根据需求进行变量喷雾,从而精确匹配施药量。柔性机械臂也可以解决喷施过程中树叶层叠、树枝遮挡等问题。多自由度对称式柔性仿形喷雾装置通过优化运动学和动力学特性,实现精准施药并减少对作物的伤害。机械臂可以避开树枝,伸入树冠内的病虫害区域,并配备集成疾病传感系统,实现自动检测病害的症状并选择性喷洒病害树冠区域,实现精准喷施[6]。
为了提高果树的防效,施药机器人设计了两排空气辅助隧道式喷雾。采用改进型离心风机产生旋转气流,将农药流雾化,辅助气流可以搅动果树的叶子,将细小的雾滴送到靶标位置,提高农药的附着率。利用新型隧道对流式风送方法,通过叶轮与风道引导气流循环往复在冠内多维流动,改善了现代篱架型果树冠层面临的农药穿透、用量大和飘移多等问题。这些技术的应用可以提高果园施药的效果,并增加防治病虫害的效率。
4.5分析与比较
智能施药机器人的喷雾装置在不同的场景下具有各自的特点和优势。以下是对大田、温室和果园场景下喷雾装置进行的简要分析比较:
1.大田场景下的喷雾装置:
·静电喷雾装置:利用静电场提高雾滴在叶片表面的吸附能力,增加沉积量和中靶率,提高施药效果。
·可调节喷杆喷雾装置:通过实时调节喷杆的喷洒范围,避免重复喷洒,减少药物浪费。
·机器视觉系统结合直喷喷杆式喷雾装置:实时监测生成精确的施药图,进行变量施药任务,显著减少用药量。
2.温室场景下的喷雾装置:
·风送喷雾装置和辅助气力导流装置:通过风送气流喷雾实现精准喷施,但需要注意雾滴逸散问题。
·机械臂和电磁阀控制喷嘴流量:实现局部变量喷雾,减少雾滴的逸散,提高喷施效果。
·静电喷嘴和多自由度机械臂:改善喷雾沉积和作业效率,提高喷施精准性。
3.果园场景下的喷雾装置:
·仿形喷雾装置:根据果树形状、大小等信息进行变量喷施,实现精确匹配施药量,提高喷施效率。
·柔性机械臂:解决喷施过程中树叶层叠、树枝遮挡等问题,减少对作物的伤害。
··空气辅助隧道式喷雾:利用辅助气流将农药送到靶标位置,提高附着率,增加防治病虫害的效率。
下面是经过对三种场景下各种喷雾装置的使用情况的调研后,绘制出的饼状图,如图4.2所示。
总之,选择合适的喷雾装置取决于具体的施药需求、作业环境和作物特点。智能施药机器人的喷雾装置可以提高施药效果和精度,减少农药浪费,从而促进农业生产的可持续发展。
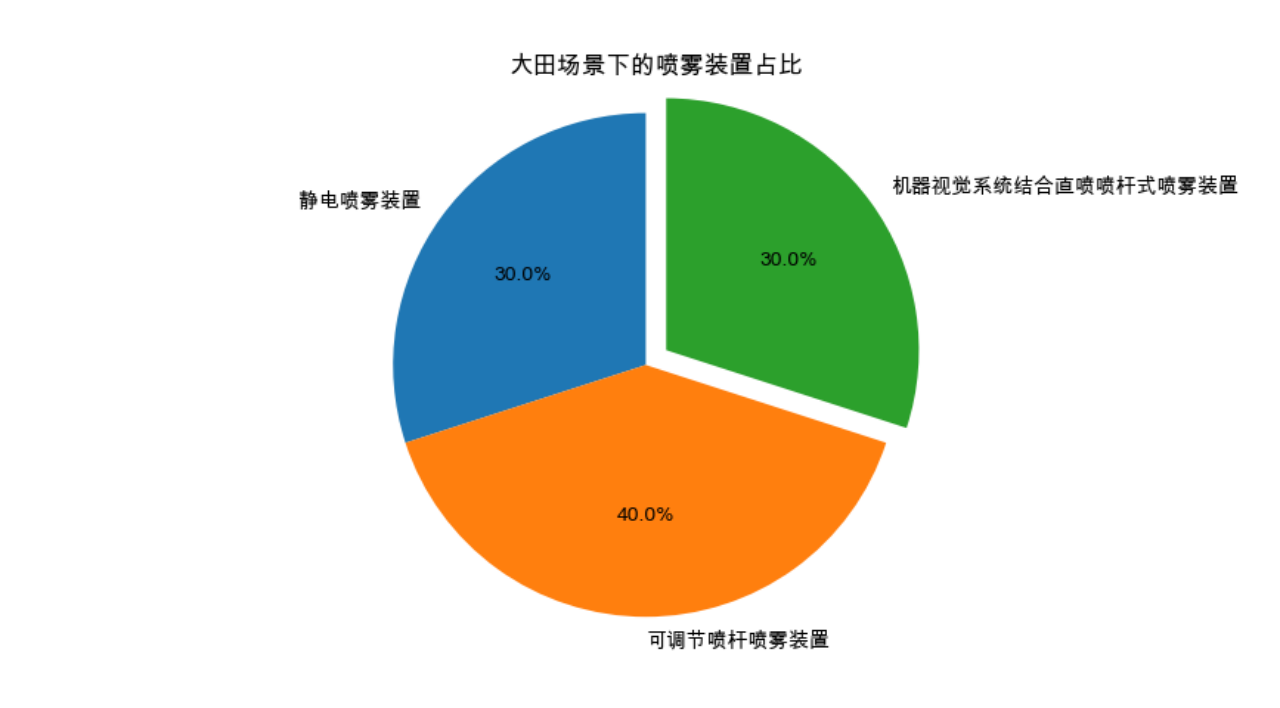

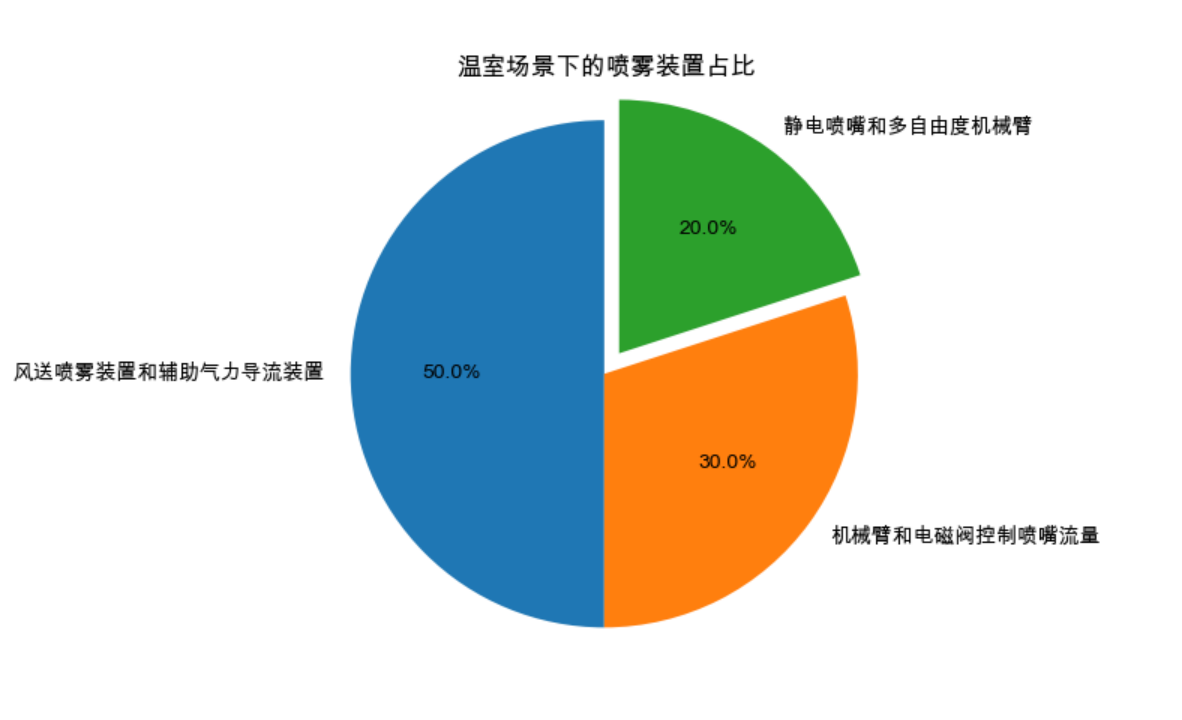
图4.2 三种场景下的喷雾装置占比
第五章:智能施药机器人导航技术
5.1引言
施药机器人利用自动导航技术可以在复杂的环境中避开障碍物寻找从起始位置到目标位置的最佳路径。现在最常用的导航方式有全球定位系统导航、视觉导航、激光雷达导航等。
5.2 GPS 导航
在农田中,智能机器人导航通常使用GPS定位技术。然而,由于树木等障碍物的遮挡可能导致通信障碍或卫星信号丢失,从而影响定位精度。为了解决这一问题,可以采用RTK技术来提高GPS位置测量的精度。通过将地理空间位置信息和处方图输入到数据采集系统中,智能机器人可以根据作物的预定处理信息来控制喷头的开启和关闭,从而实现变量施药。
5.3 传感器导航
施药机器人常用的导航传感器包括光学传感器和超声波传感器。基于光学感知原理,机器人可以使用红外传感器或激光传感器准确检测导轨位置,从而在温室中沿着轨道行驶,实现对温室植物的自主施药。另外,超声波测距传感器提供的信息可以用于导航系统,在作物行间进行定位,同时基于超声波感知靶标位置,实现机器人对靶标的喷雾操作。Mosalanejad等研究表明,在不同速度下进行测试时,施药机器人能够成功导航至指定路径,并且在不同速度下,机器人单元运动精度的均方根误差在5.22至6.38之间[7]。
5.4视觉导航
视觉导航技术使用视觉传感器获取图像信息,并通过视觉导航算法处理图像以获取导航路径(如图5.1所示)。常见的视觉传感器包括单目相机、双目相机和深度相机。与GPS导航相比,视觉导航具有更灵活和成本更低的。
单目视觉导航在果园定位精度和位置姿态信息不完整方面存在一些问题。然而,利用神经网络的强大特征提取能力和实例分割技术,可以减小偏航角、横向位移和果树位置误差。为了降低环境干扰对视觉导航系统的影响,可以采用基于UNet网络的果园视觉导航路径识别方法,该方法对光照影响较小,可以有效减小平均距离误差。
双目相机可以以较低的成本和高分辨率获取深度信息,但在缺乏纹理差异的环境中可能难以提供有效信息。针对农业机器人自动导航的需求,基于双目立体视觉的聚类识别算法确保了良好的实时性,并可以扩展到农业物联网系统。
深度相机可以获取2D RGB图像和场景中物体的深度信息。通过检测和识别障碍物目标,可以获取行驶路径,实现行间施药机器人的自主避障。
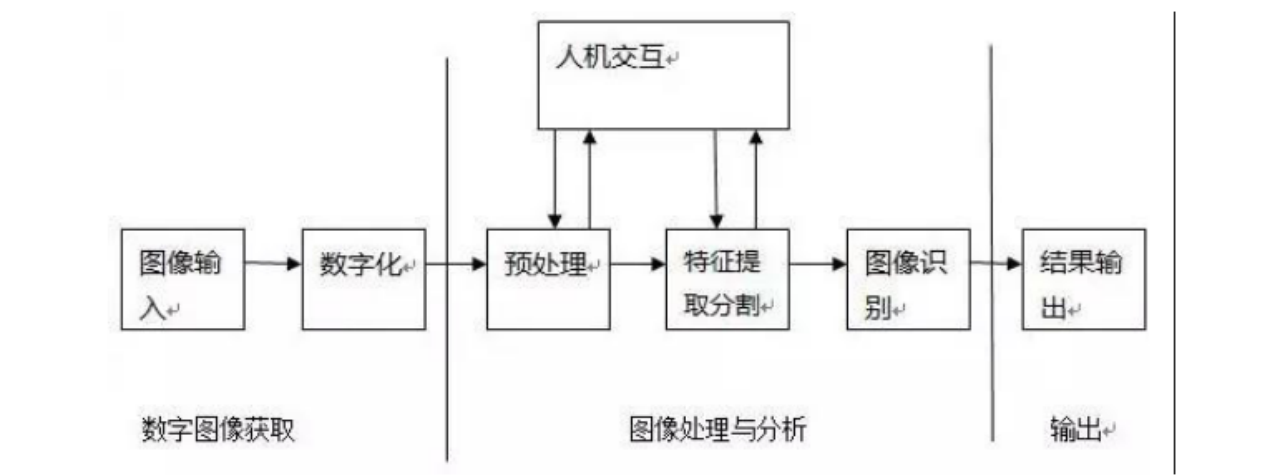
图5.1 视觉导航系统工作原理
5.5 激光雷达导航
激光雷达可以分为单线和多线两种类型。多线激光雷达能够同时发射和接收多束激光,在获取周围环境的3D扫描图和物体高度信息方面具有优势,但是需要处理大量的数据,处理时间较长。相比之下,单线激光雷达只能进行平面扫描,但其扫描速度快且价格较为便宜。
在农业机器人领域,我们可以利用单线激光雷达来采集田间的点云数据,并构建局部坐标系,从而获取障碍物与移动机器人之间的位置关系。此外,通过使用16线激光雷达采集机器人运动方向上的三维点云数据,我们可以研究作物叶片与主干点云地面投影的分布规律,以实现更精确的导航。
当激光雷达应用于设施农业时,我们可以在喷雾机器人的前后安装二维激光雷达以实时获取数据,并通过调整行驶路线和自身姿态,保持安全距离和喷雾距离,同时实现作业过程中的避障功能[8]。此外,采用前后倒挂式安装二维激光雷达可以增加扫描区域,降低扫描盲区,从而提高施药机器人的建图效率。
这些应用都旨在提高农业生产的效率和质量,减少资源浪费,并推动智能农业的发展。
5.6分析与比较
对本章提出的几种常见的导航技术进行分析与比较,结果如表5.1所示。
表5.1
| 导航技术 | 优势 | 缺点 | 适用场景 |
| GPS导航 | 定位精度高 | 受遮挡物和天气影响 | 大范围的农田 |
| 传感器导航 | 提供实时信息, 适用于自主导航 | 需要结合其他导航方式来提高精度 | 温室、行间施药机器人 |
| 视觉导航 | 灵活性高,成本低 | 环境光线、物体遮挡等因素会影响识别效果 | 自动导航、果园定位 |
| 激光雷达 | 提供3D扫描图, 避障功能强 | 价格昂贵,扫描速度慢,不适用于高速运动的机器人 | 田间环境、施药机器人安全性 |
可以得出结论:不同的导航技术在不同的应用场景下具有各自的优势和适用性。选择合适的导航技术需要考虑农田环境、成本、定位精度等因素。综合利用多种导航技术可以提高智能施药机器人的导航精度和效率,推动智能农业的发展。
第六章:智能施药机器人智能识别技术
6.1引言
农药的精准喷施可以有效提高利用率,而实现精准喷施的首要前提是目标的精准识别和检测。在施药过程中,目标检测系统可以实时获取目标的种类和位置信息,使得喷头能够根据作物的种类、位置、大小、体积、病虫害情况等参数进行精准的变量施药。然而,对于施药机器人来说,目标检测是一项具有挑战性的任务,因为田间作业环境复杂,如光线、风等不可预测的因素会影响机器人的识别性能。此外,算法的识别时间、系统通信时间以及喷雾装置的响应速度等因素也会影响施药的准确性。因此,在智能施药机器人中选择适合的目标检测技术是关键。
目前,智能施药机器人常用的目标检测技术包括红外线传感检测法、超声波传感检测法、激光雷达检测法、机器视觉检测法、光谱成像检测法,以及多传感器融合的检测方法。对于这些方法,本章进行了简要的介绍和分析比较。
6.2红外线传感检测
红外传感检测是一种常用的农作物实时检测技术。它通过红外发光管发出的红外光照射到目标作物后进行反射,并由接收器接收红外光以确定目标位置。由于其可靠性高、响应速度快、成本低等特点,得到了广泛应用。然而,使用红外探测技术时需要注意叶片的覆盖度和光照强度对探测距离的影响。因此,红外传感检测只能实现近距离探测。
6.3 超声波传感检测
超声波检测技术是一种利用超声波发射器发射超声波的方法,通过测量超声波从发射到返回的时间来计算目标距离(如图6.1所示)。随着超声波传感器精度和响应速度的提高,它逐渐被应用在施药机器人的智能识别系统中。即使采用低成本的超声波检测系统,也能够实现对作物的智能识别,并具有可行性和较高的准确性。
在果树冠层探测中,通常会将超声波传感器安装在不同高度的位置上,对果树的上、中、下三段不同高度进行探测,以获取果树不同冠层的信息。通过估算树冠的大小并结合控制系统来调整农药的施用量,实现树冠上、中、下部位的变量喷施,从而减少不同冠层的农药施用量。
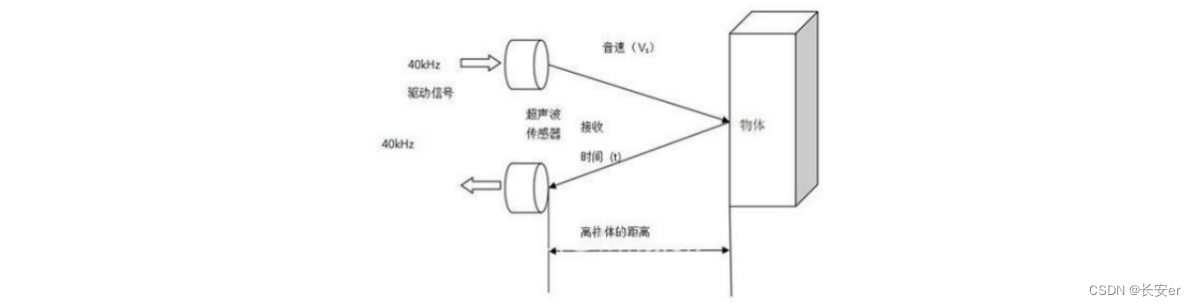
图6.1 超声波测距原理简示
6.4 激光雷达检测
激光雷达是一种通过发射强烈激光脉冲并测量反射时间来计算物体距离的传感器。与超声波和红外线传感器相比,激光雷达具有更高的精度和频率,适用于机器人定位。乔白羽等研究表明,激光雷达可以提供高精度、高频率的检测信息,并且受环境影响较小[9]。近年来,研究者在智能识别方面对激光雷达的应用不断增加。
利用激光雷达可以获取果树的形状、体积、叶面积等信息,从而实现精准变量喷施。通过使用16线激光雷达,可以准确测量作物的株高。然而,仅仅识别株高无法满足精准喷施的要求。需要通过探测更多特征信息,如树冠体积、叶面积等,才能获得更好的喷施效果。此外,激光雷达对于测量距离的精度对误差也非常敏感,因此需要额外的技术来校正这些误差。
在利用激光雷达进行精准喷施作业时,喷雾响应时间和喷雾时间对施药机器人的喷施效果起着关键作用。为了解决延时喷雾的问题,研究者采用地速传感器获取机器人的实时速度,并设计自适应延时喷雾模型,从而改善喷雾时间问题。
6.5 机器视觉检测
机器视觉技术是通过获取大量靶标 RGB 图像后,经过图像预处理和数据增强技术扩增数据集,将图像输入机器视觉模型进行训练,并通过调参优化得到可用于实时检测目标的网络模型。该技术已广泛应用于农业领域,特别是智能施药机器人的精准喷施系统中。
在农业智能识别领域,机器视觉技术可以通过边缘检测、颜色特征和形态学算法等方法,快速检测作物的存在位置,并实现近距离精准喷施。同时,利用最小二乘法和五点参数标定法,可以建立树冠体积测量模型,从而实现果树树冠体积的测量。还可以使用 SVM 图像分类器自动检测病害,并结合 Adaboost 分类器进行病害的自动识别,以实现精准变量喷施农药[10]。
下面我给出了Adaboost的算法模型图,该模型广泛应用于识别病害植株。

图6.2 Adaboost 算法模型结构图
经过几天的调研,我将使用深度学习技术进行农作物病虫害识别的近年研究整理如表6.1。
随着深度学习技术的发展,其在农作物病虫草害识别中的应用逐渐增多。深度学习技术通过大规模数据集的学习,能够自动、高效、准确地识别目标的特征,取代了传统获取图像特征信息的方式。因此,将深度学习技术应用于农作物病虫草害识别是精准农业未来发展的必然趋势。然而,利用深度学习进行目标识别需要对算法模型进行不断调参优化,并进行算法改进,以提取目标特征并达到更好的识别效果。例如,可以设计多尺度特征融合卷积神经网络识别模型,以提高幼苗识别准确率。但在复杂背景下的识别性能仍需要进一步提升。
总之,机器视觉技术和深度学习技术在农业智能识别领域的应用具有广阔的前景,可以为智能施药机器人的精准喷施系统提供支持,并推动精准农业的发展。
表6.1
| 深度学习模型 | 作物 | 病虫害 | 准确率 | 数据集 | 特点 |
| 深度卷积 神经网络 | 玉米 | 弯孢霉叶斑病、矮花叶病、叶枯病等 | 98.9% | 3,060张 | 提高玉米叶片病害的准确率,减少收敛迭代次数 |
| 深度卷积 神经网络 | 苹果 | 花叶病和链格孢叶斑病 | 97.62% | 13,689张 | 具有较高的精度,增强卷积神经网络模型的鲁棒性 |
| 多层神经网络 | 芒果 | 炭疽病 | 97.13% | 1,070张 | 基于MCNN的三元分类模型训练和测试,提高分类精度 |
| 区域卷积 神经网络 | 棉花和大豆等 | 蚜虫、跳蚤、甲虫等 | 99.00% | 75,000张 | 利用具有边界框回归的RPN模块,实时预测不同作物害虫的类别和位置 |
6.6 光谱成像检测
传统的病虫害识别方法通常需要依靠专家或农民自行进行,但这种方法成本高且时间消耗长,同时难以准确识别早期的病虫害。因此,利用光谱成像技术进行早期检测并量化病害程度,从大量的植被指数中分析出最佳拟合指数,可作为决策支持和实施精准作物保护技术的依据,以有效控制病虫害。
此外,基于光谱信息的病虫害检测,可利用反射、透射和吸收等特性来估算病害水平、郁闭度和绿叶面积等。例如,何宽等人利用高光谱成像技术无损检测轻微腐烂病害蓝莓和果蝇虫害蓝莓,具有较高的识别[11]。
多光谱反射技术也可以用于检测健康作物中的病斑,通过区分病害和健康植株的波段或波段组合来实现。另外,智能施药机器人还可以利用多光谱成像技术识别病虫害,通过训练不同视角的病虫害图像增加检测灵敏度,特别是对于早期和中期症状的检测效果将显著提高(如图6.2所示)。
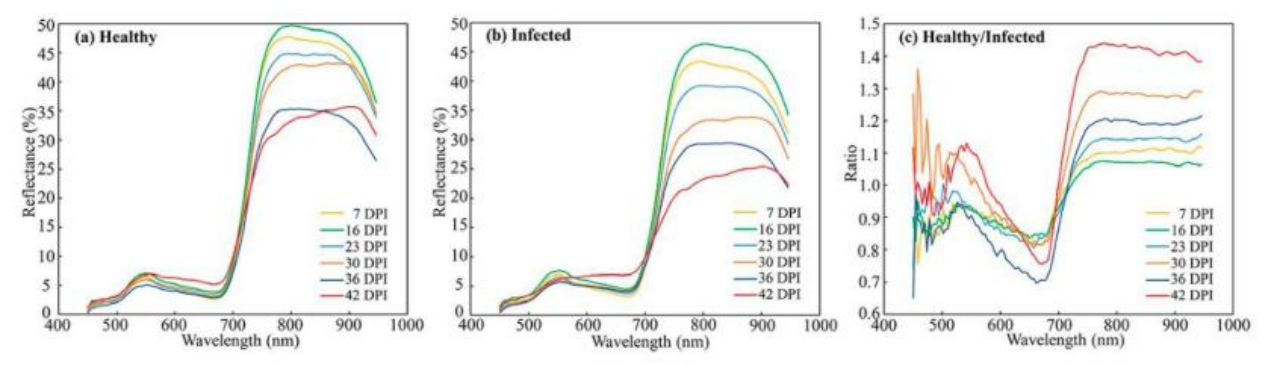 图6.3 光谱技术检测小麦黄锈病
图6.3 光谱技术检测小麦黄锈病
6.7分析与比较
下面对调研的几种方法进行分析和比较,得到了以下结论:
不同的目标检测技术各有优势和局限性。选择最适合的技术应该根据具体的作业需求和环境条件。
·红外线传感检测具有可靠性高、响应速度快、成本低等优点,但只能实现近距离探测。
·超声波传感检测具有更远的检测距离、较低的复杂性等优点,但需要考虑环境因素对其影响。
·激光雷达检测具有高精度、高频率的检测信息、受环境影响小等优点,但对测量距离的精度对误差敏感,喷雾响应时间等问题需解决。
·机器视觉检测通过深度学习技术可以实现自动、高效、准确地识别目标的特征,但在复杂背景下的识别性能仍需进一步提升。
·光谱成像检测可用于早期检测并量化病害程度,多光谱反射技术可以用于检测健康作物中的病斑,但需要专业设备支持,成本较高。
在实际应用中,可以根据具体的作业需求和环境条件进行选择。如果作业范围比较小,可以采用成本低、可靠性高的红外线传感检测;如果需要探测距离比较远,可以采用超声波传感检测;如果需要精度更高且不受环境影响,可以采用激光雷达检测等。同时,各种技术之间也可以结合使用,以达到更好的效果。
第七章:总结与展望
7.1研究目前存在的问题
7.1.1 实时执行任务方面
由于作业地形、转向控制、导航偏离等外部环境的改变,智能施药机器人在实际农业作业中难以保证任务的实时执行效果。响应延时会导致机器人无法及时处理田间作业时发生的各类动态变化信息,进而影响施药效果和准确识别目标的能力。
7.1.2 控制精度和探测精度方面
大田环境的崎岖不平、车辆震动等因素会影响传感器和深度学习模型的探测精度,进而影响导航和目标识别的准确性。需要通过多传感器融合技术、障碍探测技术、图像处理方法等手段来提高探测精度,解决误差增大的问题。
7.1.3轻量化底盘设计方面
智能施药机器人需要承载大容量的药箱和安装各种部件,因此底盘需要具有一定的承载能力。然而,底盘的重量会限制机器人在复杂田间环境中的越障和跨越沟渠能力,降低作业性能。因此,需要开发轻量化底盘设计,减少整机质量,提高灵巧性、安全性和稳定性。
7.1.4研发成本方面
智能施药机器人的研发成本受到传感器、控制装置等设备价格的影响。尤其是激光雷达等精准识别设备价格昂贵,增加了施药机器人的成本,进而增加了农业生产成本。为推广应用智能施药机器人,需要考虑材料选择、价格、环保等因素,降低研发成本。
7.2 未来发展方向
智能施药机器人在农业的生态可持续化发展中具有重要的应用价值。未来,可以通过以下方面进行进一步研究和发展:
·加强技术研究:进一步提高机器人的实时执行任务能力,包括响应速度、信息获取和处理能力。同时,优化传感器和深度学习模型,提高探测精度和稳定性。还可以应用多传感器融合技术,提高导航和目标识别的准确性。
·推动创新设计:通过轻量化底盘设计,提高机器人的灵活性、安全性和稳定性,以适应复杂的田间作业环境。同时,降低研发成本,选择合适的材料和设备,提高机器人的性价比。
·加强合作与集成:探索地空一体化、施药机器人集群化作业,实现智能施药机器人与植保无人机的协同作业,提高施药效果和作业效率。
7.3总结
智能施药机器人在应对中国人口老龄化和环境污染等问题方面具有重要价值。已经有大量研究成果,但仍存在关键技术问题需要进一步研究,包括实时响应和信息处理能力、探测精度和稳定性、轻量化底盘设计和降低研发成本等方面。相信在未来研究人员将不断改进技术和设计,推动智能施药机器人在农业生产中的广泛应用,促进农业的生态可持续化发展。
参考文献
【1】孔祥智.守住底线做好三项重点工作:2023年中央一号文件解读[J].乡村振兴,2023(4):52-55.
【2】Qiu W, Zhao S Q, Ding W M, et al. Effects of fan speed on spray deposition and drift for targetingair-assisted sprayer in pear orchard[J]. International Journal of Agricultural and Biological Engineering, 2019, 9(4): 53-62.
【3】张燕军,杨天,徐勇,等. 温室履带式智能施药机器人设计与试验[J]. 农机化研究,2023,44(8):97-104.
【4】Kawin N, Karthi N, Saravanampatti C. Six legged semi-auomatic machine for agricultural seeding and spraying[J]. Gradiva Review Journal,2023,8(6):380-386.
【5】吴硕,王荣锴,刘继展. 一种温室草莓冠层内圆周风送施药机器人及其实现方法:CN111436414B[P]. 2021-11-23.
【6】 Bao X, Niu Y, Li Y, et al. Design and kinematic analysis of cable-driven target spray robot for citrus orchards[J]. Applied Sciences, 2022, 12(18): 9379.
【7】Mosalanejad H, Minaei S, Borghei A, et al. Evaluation of navigation system of a robot designed for greenhouse spraying[J]. International Journal on Smart Sensing and Intelligent Systems, 2020, 13(1): 1-12.
【8】刘慧,段云鹏,张世义,等. 一种温室自主精准变量风送喷雾机器人结构及规划路径方法:CN113341961A[P]. 2021-09-03.
【9】乔白羽,何雄奎,王志翀,等. 基于 LiDAR 扫描的高地隙宽幅喷雾机变量施药系统研制[J]. 农业工程学报,2020,36(14):89-95.
【10】Kameswari S, Prabhakar T, Kishore K K. Autonomous pesticide spraying robot using SVM[C]//Proceedings of International Conference on Wireless Communication. Springer, Singapore, 2022: 293-302.
【11】何宽. 基于高光谱成像的蓝莓病虫害的检测方法研究[D]. 沈阳:沈阳农业大学,2019,23(7):89-112.