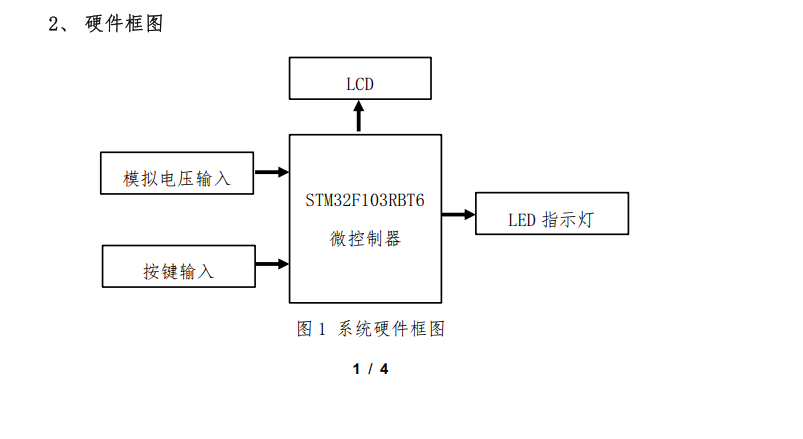
蓝桥杯嵌入式第10届真题(完成) STM32G431
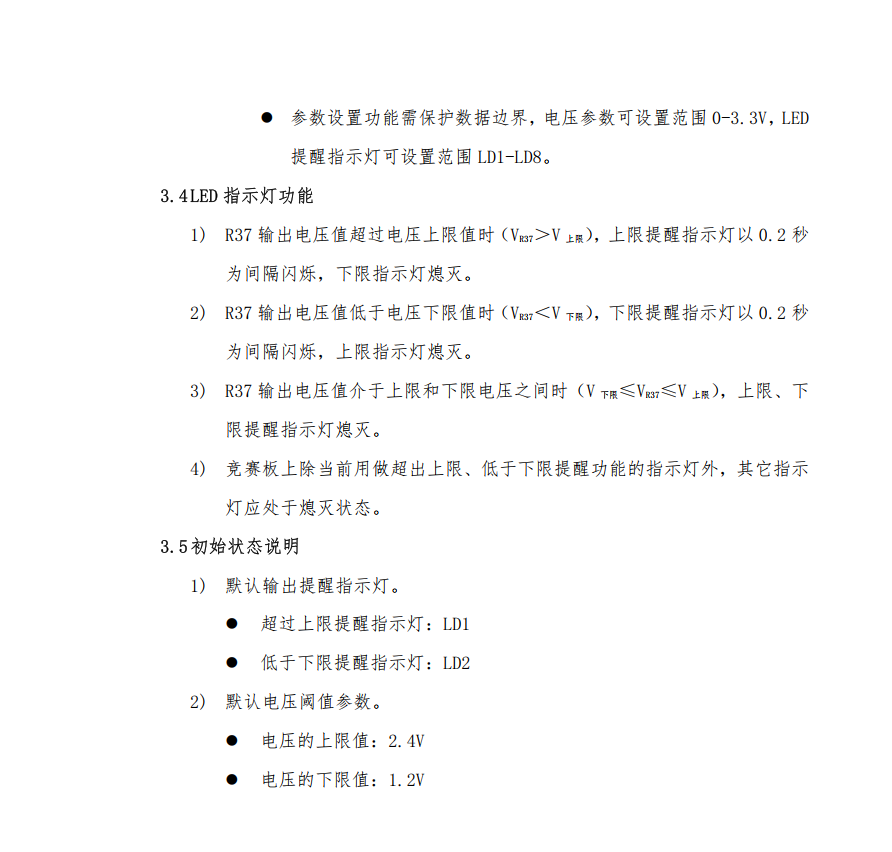
题目
main.c
#include "main.h"
#include "adc.h"
#include "tim.h"
#include "gpio.h"
#include "led.h"
#include "key.h"
#include "myadc.h"
#include "stdbool.h"
#include "stdio.h"
int8_t upled = 0x01;
int8_t uplednum = 1;
int8_t lowled = 0x02;
int8_t lowlednum = 2;
float upval = 2.4;
float lowval = 1.2;
float val;
uint32_t led1time = 0;
uint32_t led2time = 0;
uint8_t led1enable = 0;
uint8_t led2enable = 0;
uint8_t view = 0;
uint8_t lcdtext[30];
uint8_t status[30];
extern struct Key key[4];
void SystemClock_Config(void);
void led_process(void);
void lcd_process(void);
void adc_process(void);
void key_process(void);
void lcdclear(void)
{LCD_Clear(Black);LCD_SetBackColor(Black);LCD_SetTextColor(White);
}
int main(void)
{HAL_Init();SystemClock_Config();MX_GPIO_Init();MX_ADC2_Init();MX_TIM2_Init();HAL_TIM_Base_Start_IT(&htim2);LCD_Init();lcdclear();led_display(0x00);while (1){key_process();adc_process();lcd_process();led_process();}
}
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};RCC_PeriphCLKInitTypeDef PeriphClkInit = {0};HAL_PWREx_ControlVoltageScaling(PWR_REGULATOR_VOLTAGE_SCALE1);RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;RCC_OscInitStruct.HSIState = RCC_HSI_ON;RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI;RCC_OscInitStruct.PLL.PLLM = RCC_PLLM_DIV2;RCC_OscInitStruct.PLL.PLLN = 20;RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;RCC_OscInitStruct.PLL.PLLQ = RCC_PLLQ_DIV2;RCC_OscInitStruct.PLL.PLLR = RCC_PLLR_DIV2;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK){Error_Handler();}PeriphClkInit.PeriphClockSelection = RCC_PERIPHCLK_ADC12;PeriphClkInit.Adc12ClockSelection = RCC_ADC12CLKSOURCE_SYSCLK;if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInit) != HAL_OK){Error_Handler();}
}
void led_process(void)
{static bool led1flag = false;static bool led2flag = false;uint32_t currentTick = HAL_GetTick(); if(led1enable && (currentTick - led1time >= 200)){led1time = currentTick; led1flag = !led1flag; if(led1flag){led_display(upled); }else{led_display(0x00); }}if(led2enable && (currentTick - led2time >= 200)){led2time = currentTick; led2flag = !led2flag; if(led2flag){led_display(lowled); }else{led_display(0x00); }}
}void lcd_process(void)
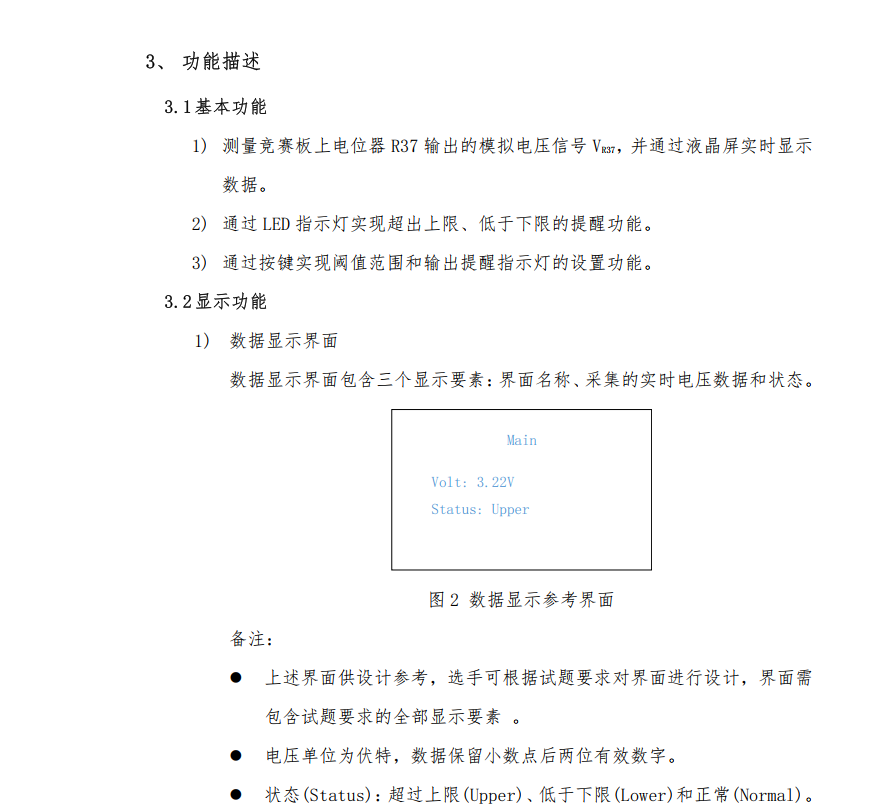
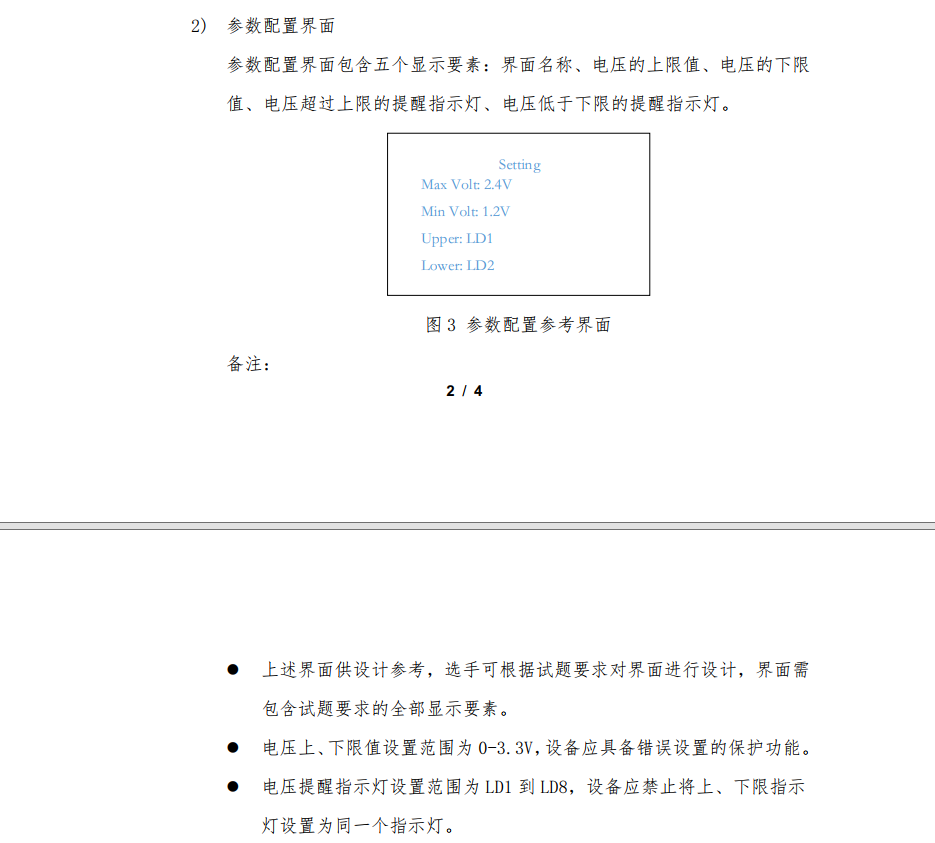
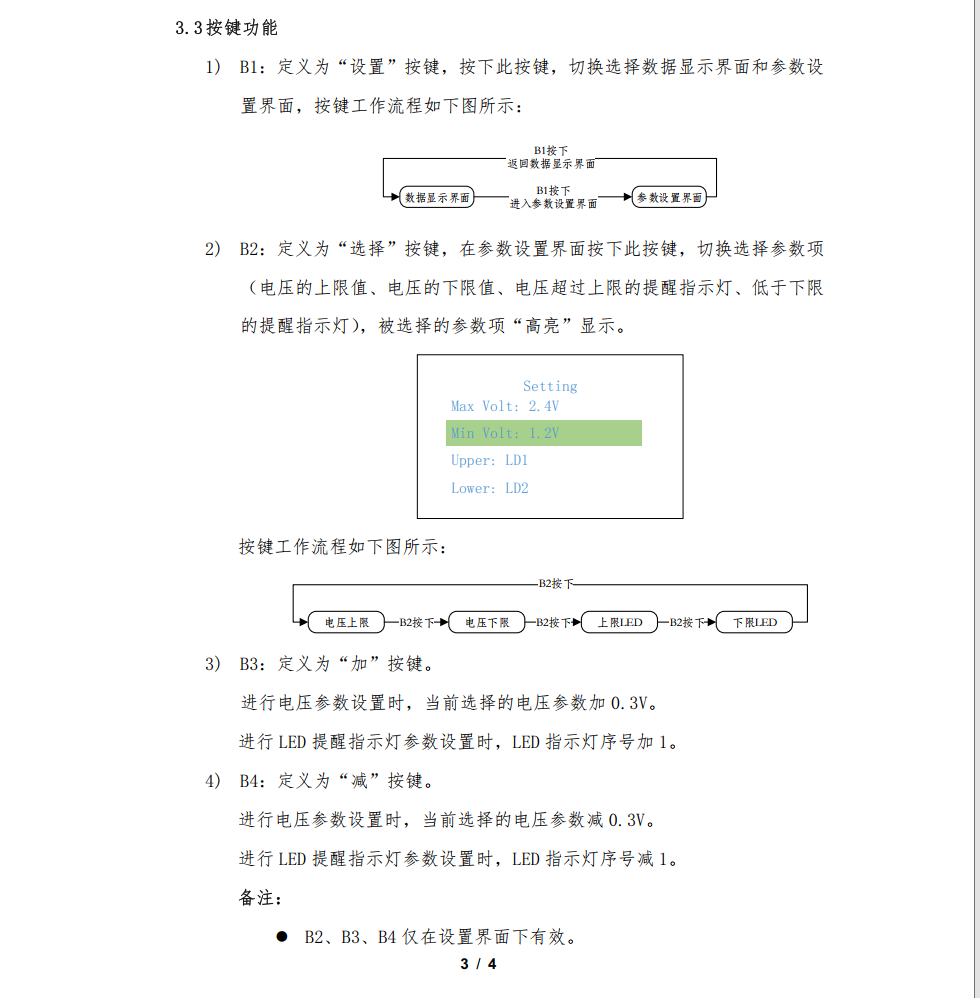
{switch(view){case 0:{sprintf((char *)lcdtext," Main");LCD_DisplayStringLine(Line1,lcdtext);sprintf((char *)lcdtext," Volt:%.2f",val);LCD_DisplayStringLine(Line4,lcdtext);sprintf((char *)lcdtext," Status:%s",status);LCD_DisplayStringLine(Line6,lcdtext);}break;case 1:{sprintf((char *)lcdtext," Setting");LCD_DisplayStringLine(Line1,lcdtext);sprintf((char *)lcdtext," Max Volt:%.2f",upval);LCD_DisplayStringLine(Line3,lcdtext);sprintf((char *)lcdtext," Min Volt:%.2f",lowval);LCD_DisplayStringLine(Line5,lcdtext);sprintf((char *)lcdtext," Upper:LD%d",uplednum);LCD_DisplayStringLine(Line7,lcdtext);sprintf((char *)lcdtext," Lower:LD%d",lowlednum);LCD_DisplayStringLine(Line9,lcdtext);}break;case 2:{sprintf((char *)lcdtext," Setting");LCD_DisplayStringLine(Line1,lcdtext);sprintf((char *)lcdtext," Max Volt:%.2f",upval);LCD_SetBackColor(Green);LCD_DisplayStringLine(Line3,lcdtext);LCD_SetBackColor(Black);sprintf((char *)lcdtext," Min Volt:%.2f",lowval);LCD_DisplayStringLine(Line5,lcdtext);sprintf((char *)lcdtext," UpperLD:%d",uplednum);LCD_DisplayStringLine(Line7,lcdtext);sprintf((char *)lcdtext," Lower:LD%d",lowlednum);LCD_DisplayStringLine(Line9,lcdtext);}break;case 3:{sprintf((char *)lcdtext," Setting");LCD_DisplayStringLine(Line1,lcdtext);sprintf((char *)lcdtext," Max Volt:%.2f",upval);LCD_DisplayStringLine(Line3,lcdtext);sprintf((char *)lcdtext," Min Volt:%.2f",lowval);LCD_SetBackColor(Green);LCD_DisplayStringLine(Line5,lcdtext);LCD_SetBackColor(Black);sprintf((char *)lcdtext," Upper:LD%d",uplednum);LCD_DisplayStringLine(Line7,lcdtext);sprintf((char *)lcdtext," Lower:LD%d",lowlednum);LCD_DisplayStringLine(Line9,lcdtext);}break;case 4:{sprintf((char *)lcdtext," Setting");LCD_DisplayStringLine(Line1,lcdtext);sprintf((char *)lcdtext," Max Volt:%.2f",upval);LCD_DisplayStringLine(Line3,lcdtext);sprintf((char *)lcdtext," Min Volt:%.2f",lowval);LCD_DisplayStringLine(Line5,lcdtext);sprintf((char *)lcdtext," Upper:LD%d",uplednum);LCD_SetBackColor(Green);LCD_DisplayStringLine(Line7,lcdtext);LCD_SetBackColor(Black);sprintf((char *)lcdtext," Lower:LD%d",lowlednum);LCD_DisplayStringLine(Line9,lcdtext);}break;case 5:{sprintf((char *)lcdtext," Setting");LCD_DisplayStringLine(Line1,lcdtext);sprintf((char *)lcdtext," Max Volt:%.2f",upval);LCD_DisplayStringLine(Line3,lcdtext);sprintf((char *)lcdtext," Min Volt:%.2f",lowval);LCD_DisplayStringLine(Line5,lcdtext);sprintf((char *)lcdtext," Upper:LD%d",uplednum);LCD_DisplayStringLine(Line7,lcdtext);sprintf((char *)lcdtext," Lower:LD%d",lowlednum);LCD_SetBackColor(Green);LCD_DisplayStringLine(Line9,lcdtext);LCD_SetBackColor(Black);}break;}
}
void adc_process(void)
{val = getADcVal(&hadc2);if(val>upval){led1enable = 1;led2enable = 0;sprintf((char *)status,"Upper ");}else if(val<=upval&&val>=lowval){led1enable = 0;led2enable = 0;led_display(0x00);sprintf((char *)status,"Normal ");}else{led1enable = 0;led2enable = 1;sprintf((char *)status,"Lower ");}
}
void key_process(void)
{if(key[0].key_single_flag){lcdclear();key[0].key_single_flag = 0;if(view==0){view = 1;}else if(view==1||view==2||view==3||view==4||view==5){view = 0;}}if(key[1].key_single_flag){lcdclear();key[1].key_single_flag = 0;if(view==1){view = 2;}else if(view>=2&&view<=5){view++;if(view>5)view = 2;}}if(key[2].key_single_flag) {key[2].key_single_flag = 0; if(view == 4) { uplednum = (uplednum % 8) + 1; upled = 0x01 << (uplednum - 1); } else if(view == 5) { lowlednum = (lowlednum % 8) + 1; lowled = 0x01 << (lowlednum - 1); }}if(key[3].key_single_flag) {key[3].key_single_flag = 0; if(view == 4) { uplednum = (uplednum == 1) ? 8 : uplednum - 1; upled = 0x01 << (uplednum - 1); } else if(view == 5) { lowlednum = (lowlednum == 1) ? 8 : lowlednum - 1; lowled = 0x01 << (lowlednum - 1); }}}
void Error_Handler(void)
{
}#ifdef USE_FULL_ASSERT
void assert_failed(uint8_t *file, uint32_t line)
{
}
#endif
key.c
#include "key.h"struct Key key[4]={0,0,0,0};
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{if(htim->Instance==TIM2){key[0].key_gpio = HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_0);key[1].key_gpio = HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_1);key[2].key_gpio = HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_2);key[3].key_gpio = HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0);for(int i = 0;i<4;i++){switch(key[i].key_status){case 0:{if(key[i].key_gpio==0){key[i].key_status = 1;}}break;case 1:{if(key[i].key_gpio==0){key[i].key_single_flag = 1;key[i].key_status = 2;}else{key[i].key_status = 0;}}break;case 2:{if(key[i].key_gpio==1){key[i].key_status = 0;}}break;}}}
}
led.c
#include "led.h"void led_display(uint8_t led)
{HAL_GPIO_WritePin(GPIOC,GPIO_PIN_All,GPIO_PIN_SET);HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);HAL_GPIO_WritePin(GPIOC,led<<8,GPIO_PIN_RESET);HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);
}
myadc.c
#include "myadc.h"
float getADcVal(ADC_HandleTypeDef *hadc)
{float val;HAL_ADC_Start(hadc);val = HAL_ADC_GetValue(hadc);return val*3.3f/4096;}