机器人传感器的分类
传感技术是先进机器人的三大要素(感知、决策和动作)之一。根据用途不同,机器人传感器可以分为两大类:用于检测机器人自身状态的内部传感器和用于检测机器人相关环境参数的外部传感器。
内部传感器
内部传感器以它自己的坐标轴来确定其位置,通常包括位置、加速度、速度、压力等传感器,检测的对象包括关节的线位移、角位移等几何量,速度、加速度、角速度、姿态、方向等运动量,还有倾斜角、压力、力矩和振动等物理量;用于机器人的精确控制。
外部传感器
外部传感器主要用于测量机器人周边环境参数,允许机器人相对其环境而定位,通常与机器人的作业对象(如是什么物体)、所处环境(离物体的距离有多远等)、状况(如抓取的物体是否滑落)、作业安全、目标识别等因素有关。用于获取作业对象及外界环境等方面的信息,是机器人与周围交互工作的信息通道。从机器人系统的观点来看,外部传感器的信号一般用于规划决策层。外部传感器可以分为接触传感器和非接触传感器两类。接触式传感器则以某种实际接触(如碰触、力或力矩、压力、位置、温度、电量和磁量等)形式来测量目标的响应。非接触式传感器以某种电磁射线(如可见光、X射线、红外线、雷达波、声波、超声波和电磁射线等)的形式来测量目标的响应。
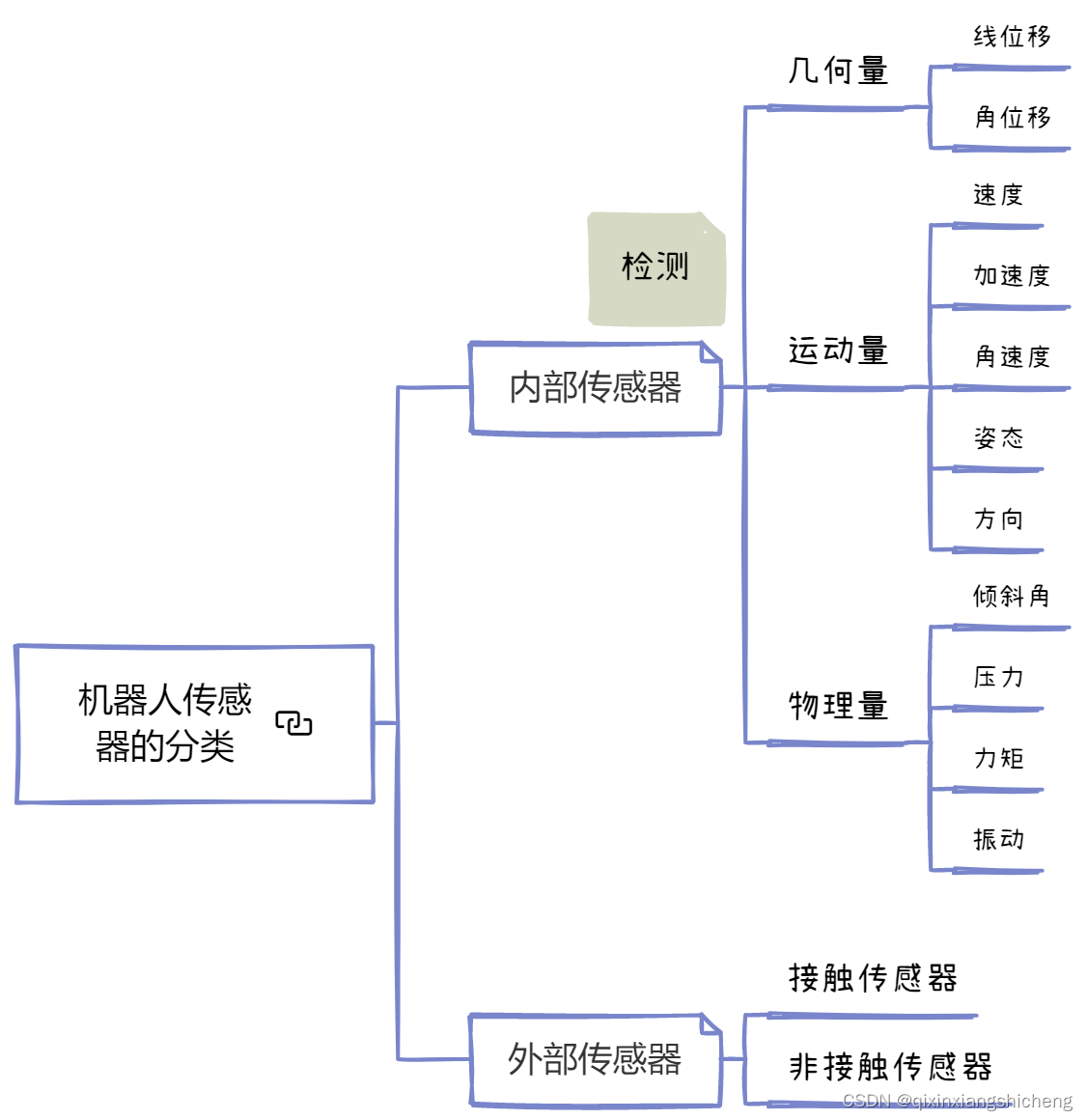
图1 机器人传感器的分类
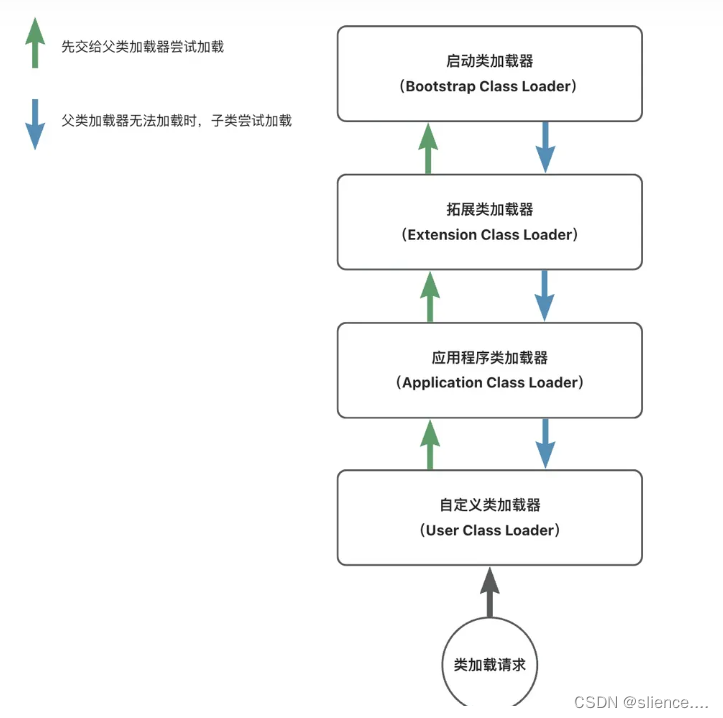
机器人传感器还有另种分类方式,比如可分为接触式传感器和非接触式传感器、内传感器和外传感器、无源传感器和有源传感器、无扰动传感器和扰动传感器等。

![]()
图2 机器人传感器另种分类方式
机器人传感器的要求
机器人对传感器的一般性要求如下:
- 精度高、重复性好:机器人是否能够准确无误地正常工作,往往取决于其所用传感器的测量精度。
- 稳定性好、可靠性好:保证机器人能够长期、稳定、可靠地工作,尽可能避免在工作中出现故障。
- 抗干扰能力强:机器人的工作环境往往比较恶劣,其所用传感器应能承受一定的电磁干扰和振动,并能在高温、高压、高污染环境中正常工作。
- 质量小、体积小、安装方便。
- 价格低。







![[AIGC] 利用 ChatGpt 深入理解 Java 虚拟机(JVM)的内存分布](https://img-blog.csdnimg.cn/direct/436c86c158724bb0a26583efa6e75a80.png)