目录
- 一、 SPI 概述
- 二、SPI 模块相关API
- 三、接口调用实例
- 四、SPI HDF驱动开发
- 4.1、开发步骤(待续...)
- 坚持就有收获
一、 SPI 概述
SPI 是串行外设接口(Serial Peripheral Interface)是一种高速的全双工同步的通信总线。
SPI 是由 Motorola 公司开发,用于在主设备和从设备之间进行通信,常用于与闪存、实时时钟、传感器以及模数转换器等进行通信。
SPI 通信通常由主设备发起,通过以下步骤完成一次通信:
- 通过 CS 选中要通信的从设备,在任意时刻一个主设备上最多只能有一个从设备被选中。
- 通过 SCLK 给选中的从设备提供时钟信号。
- 基于 SCLK 时钟信号,主设备数据通过 MOSI 发送给从设备,同时通过 MISO 接收从设备发送的数据,完成通信。
从设备 A 和从设备 B 共享主设备的 SCLK、MISO 和 MOSI 三根引脚,从设备 A 的片选 CS0 连接主设备的 CS0,从设备 B 的片选 CS1 连接主设备的 CS1。
SPI 设备的连接示意图如下:
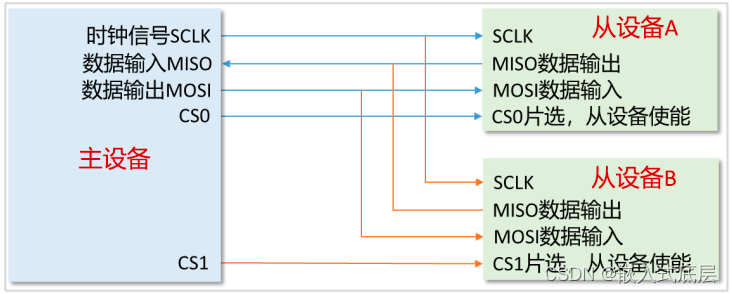
SPI 以主从方式工作,通常有一个主设备和一个或者多个从设备。主设备和从设备之间一般用4 根线相连,它们分别是:
- SCLK – 时钟信号,由主设备产生;
- MOSI – 主设备数据输出,从设备数据输入;
- MISO – 主设备数据输入,从设备数据输出;
- CS – 片选,从设备使能信号,由主设备控制。
数据的采集时机是时钟信号的边沿(上升沿或下降沿),根据 SCLK 时钟信号的 CPOL(Clock Polarity,时钟极性)和 CPHA(Clock Phase,时钟相位)的不同组合,SPI 有以下四种工作模式:
- CPOL=0,CPHA=0 时钟信号 idle 状态为低电平,第一个时钟边沿采样数据。
- CPOL=0,CPHA=1 时钟信号 idle 状态为低电平,第二个时钟边沿采样数据。
- CPOL=1,CPHA=0 时钟信号 idle 状态为高电平,第一个时钟边沿采样数据。
- CPOL=1,CPHA=1 时钟信号 idle 状态为高电平,第二个时钟边沿采样数据。
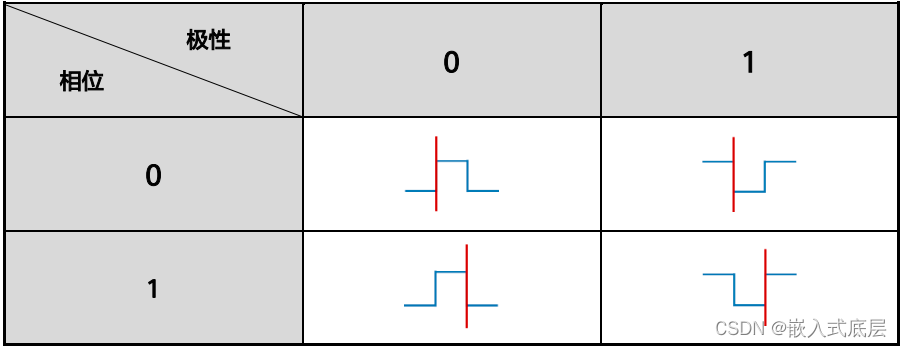
如下图所示:
SPI 操作流程如下:

二、SPI 模块相关API
头文件路径:base/iothardware/peripheral/interfaces/inner_api/iot_spi.h
| 接口函数 | 描述 |
|---|---|
| hi_u32 hi_spi_init(hi_spi_idx spi_id, hi_spi_cfg_init_param init_param, const hi_spi_cfg_basic_info *param); | 初始化SPI |
| hi_u32 hi_spi_slave_write(hi_spi_idx spi_id, hi_pvoid write_data, hi_u32 byte_len, hi_u32 time_out_ms); | SPI从写操作 |
| hi_u32 hi_spi_host_write(hi_spi_idx spi_id, hi_pvoid write_data, hi_u32 byte_len); | SPI主写操作 |
| hi_u32 hi_spi_host_writeread(hi_spi_idx spi_id, hi_pvoid write_data, hi_pvoid read_data, hi_u32 byte_len); | SPI主读写操作 |
三、接口调用实例
//代码功能:定义了 SPI 接口功能以及 SPI 相关参数,GPIO_00 号口作为 SPI1_CLK 模式。IotSpiCfgBasicInfo BasicInfo;
BasicInfo.cpol = HI_SPI_CFG_CLOCK_CPOL_1; //通信极性
BasicInfo.cpha = HI_SPI_CFG_CLOCK_CPHA_1; //通信相位
BasicInfo.framMode = HI_SPI_CFG_FRAM_MODE_MOTOROLA; //MOTOROLA 协议
BasicInfo.dataWidth = HI _SPI_CFG_DATA_WIDTH_E_8BIT; //位宽为 8bit
BasicInfo.endian = HI_SPI_CFG_ENDIAN_LITTLE; //小端传输
BasicInfo.pad =31; //主发模式
BasicInfo.freq= 40000000; //通信频率
IotSpiCfgInitParam InitParam;
ret=IoTSpiInit(0,InitParam, &BasicInfo);四、SPI HDF驱动开发
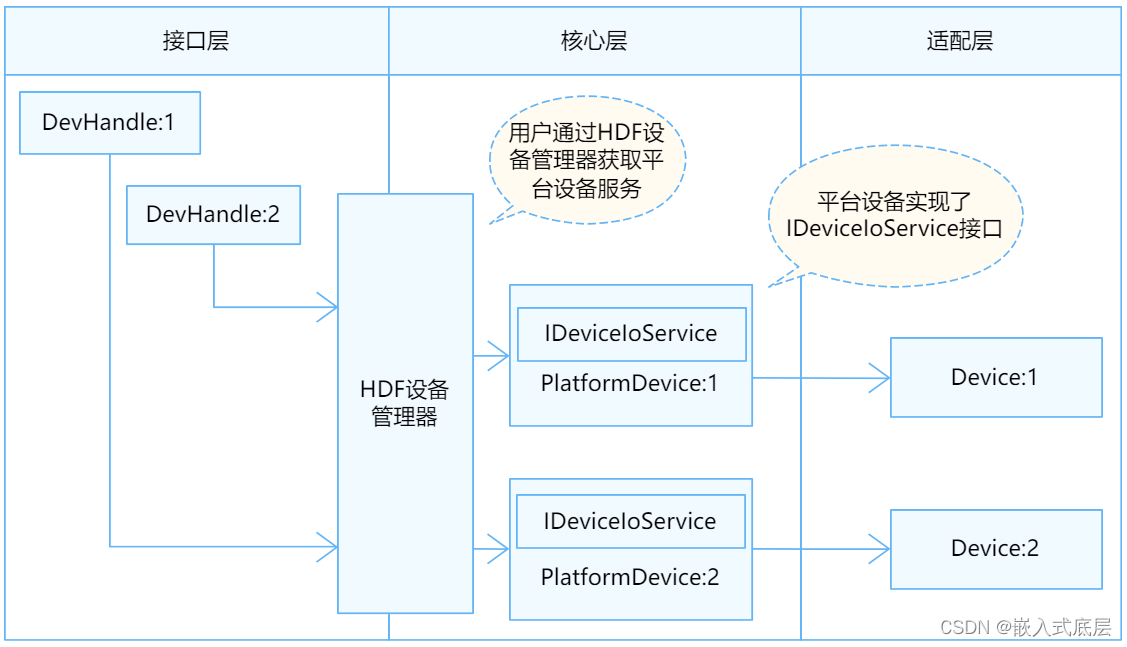
在HDF框架中,SPI的接口适配模式采用独立服务模式(如图1所示),在这种模式下,每一个设备对象会独立发布一个设备服务来处理外部访问,设备管理器收到API的访问请求之后,通过提取该请求的参数,达到调用实际设备对象的相应内部方法的目的。独立服务模式可以直接借助HDFDeviceManager的服务管理能力,但需要为每个设备单独配置设备节点,若设备过多可能增加内存占用。
独立服务模式下,核心层不会统一发布一个服务供上层使用,因此这种模式下驱动要为每个控制器发布一个服务,具体表现为:
- 驱动适配者需要实现HdfDriverEntry的Bind钩子函数以绑定服务。
- device_info.hcs文件中deviceNode的policy字段为1或2,不能为0。
图 1 SPI独立服务模式结构图
4.1、开发步骤(待续…)
SPI模块适配包含以下四个步骤:
-
实例化驱动入口
- 实例化HdfDriverEntry结构体成员。
- 调用HDF_INIT将HdfDriverEntry实例化对象注册到HDF框架中。
-
配置属性文件
- 在device_info.hcs文件中添加deviceNode描述。
- 【可选】添加spi_config.hcs器件属性文件。
-
实例化SPI控制器对象
- 初始化SpiCntlr成员。
- 实例化SpiCntlr成员SpiCntlrMethod。
-
说明:
- 实例化SpiCntlr成员SpiCntlrMethod,其定义和成员说明见接口说明。
-
驱动调试
- 【可选】针对新增驱动程序,建议验证驱动基本功能,例如SPI控制状态,中断响应情况等。
坚持就有收获