四旋翼无人机控制-零散笔记整理
- 说明
- 仿真框架
说明
这是低创文章,本意是整理本科留下来的一堆零碎的纸质笔记,整理完就把纸质的扔了。所以前后不连贯,也可能有错误,图片都是直接拍的笔记照片,很丑。如果想系统学习的可以跳出去了,但如果真的帮助到了你,请点个赞吧。我不是一次把东西整理完的,看到一个曾经的笔记就往这个文章里加一点,所以会一直更新。
仿真框架
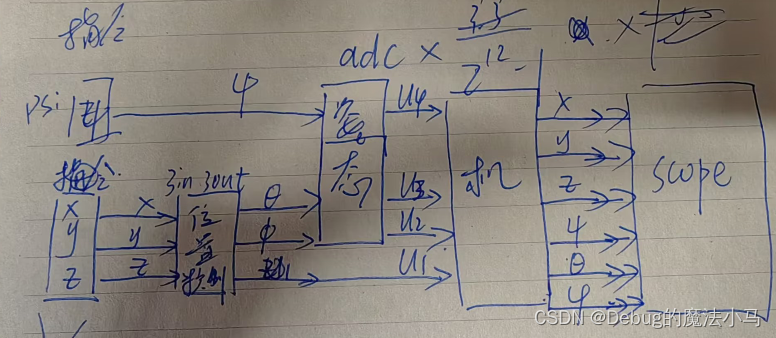
最左边是指令接口,一般需要告诉控制系统希望无人机到达的位置,也就是x,y,z还有他的航向角也就是fai。实现可以用simulink的各种输入模块。最右边是simlink的示波器,也可以是任何其他的显示接口,可以让你监视执行结果,也就是无人机运动的全部运动学状态x,y,z,fai,theta,psi。写着“机”的那个模块是无人机的动力学和运动学模型,可以用simulink的好像叫什么function的模块代码实现。他的输入是控制系统给出的控制量u1,u2,u3,u4,输出是x,y,z,fai,theta,psi。输出状态很好理解,输入的u1到u4可不是四个旋翼的转速,而是他们的组合。比如u1是四个转速之和,对应升降的控制,u4是两个对角旋翼转速和的差,对应航向的控制。这个无人机模型到底是什么,可以看论文、博客给出的,不同文章他们考虑的因素不同,会有差异,选一个简化的就行。
因为无人机的横向速度无法直接通过旋翼控制,旋翼要先控制无人机的倾角,这个倾角决定了横向位移的加速度,进而控制横向位移。所以可以理解为是一个串级控制的过程。其中姿态:航向角和位置:高度 脱离这个串级。但位置x和y的变化依赖于姿态俯仰角和滚转角theta,psi的值,这两个姿态再由姿态控制器控制。这个串级的位置控制器和姿态控制器就是一般的四旋翼飞行控制系统需要做的部分。
非线性的无人机模型建立可以参考这篇论文:非线性无人机模型论文