配置操作
先得配置下GPIO用的是哪个引脚
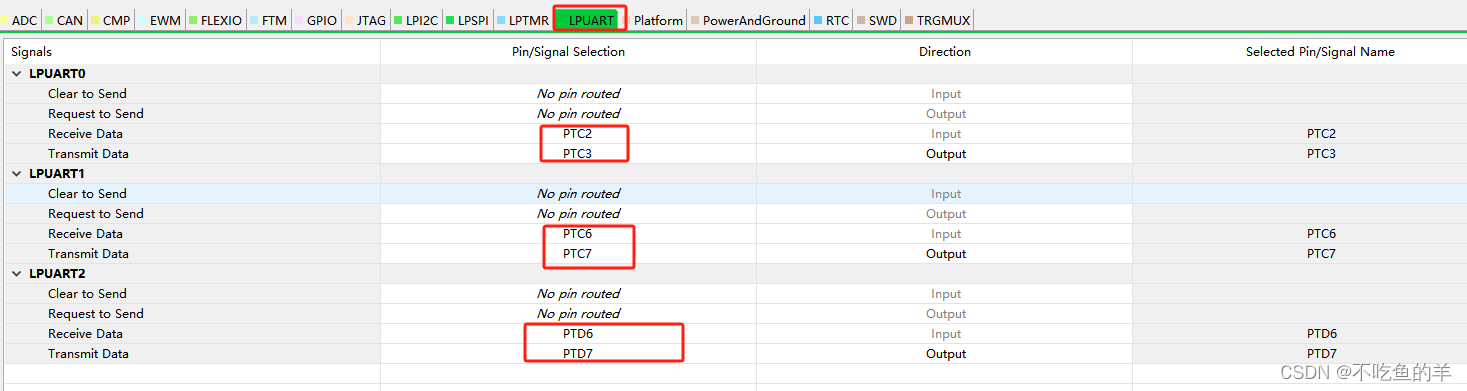
跟之前的外设一样,它这里有两个UART可以用。
这里只能用UART0和2的原因是UART1被LIN使用了。
配置的内容为

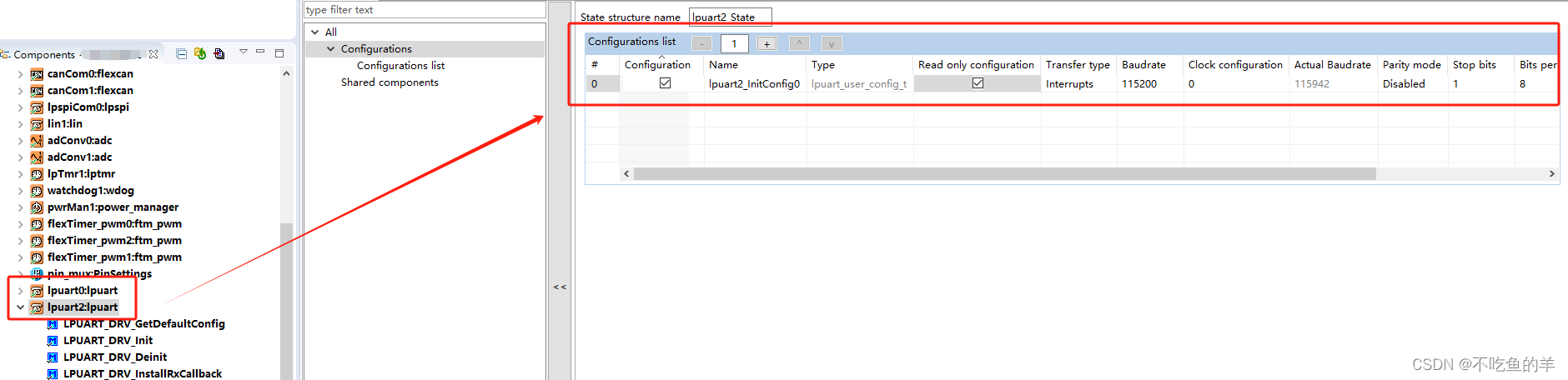
生成代码对应
首先会根据components名称创建个驱动状态结构体
/*! Driver state structure */
lpuart_state_t lpuart2_State;配置状态结构体
/*! lpuart2 configuration structure */
const lpuart_user_config_t lpuart2_InitConfig0 = {.transferType = LPUART_USING_INTERRUPTS,.baudRate = 115200U,.parityMode = LPUART_PARITY_DISABLED,.stopBitCount = LPUART_ONE_STOP_BIT,.bitCountPerChar = LPUART_8_BITS_PER_CHAR,.rxDMAChannel = 0U,.txDMAChannel = 0U,
};只读的话就是配置状态结构体类型前面加个const
传输方式可以选择中断或者DMA
选择中断方式的话,后面的接收和发送DMA通道都会变成0,不起作用。
DMA模式可以不等到CPU来处理中断的时候才进行数据传输,可以直接通过DMA通道搬运数据,降低对应功能对CPU使用率。
这两种方式只是硬件处理上的不同,软件只需要配置一下就OK,使用方法和步骤都是一样的。
/*! @brief Type of LPUART transfer (based on interrupts or DMA).** Implements : lpuart_transfer_type_t_Class*/
typedef enum
{LPUART_USING_DMA = 0, /*!< The driver will use DMA to perform UART transfer */LPUART_USING_INTERRUPTS /*!< The driver will use interrupts to perform UART transfer */
} lpuart_transfer_type_t;中断是最常用的,如果选择DMA模式的话,需要在DMA里面设置对应的通道,我在这里就新建了通道2和3,并且映射到UART2里面的RX和TX。

dmaController1.c文件和dmaController1.h文件新定义了两个DMA通道结构体和两个DMA通道配置结构体
edma_chn_state_t dmaController1Chn0_State;edma_chn_state_t dmaController1Chn1_State;edma_chn_state_t dmaController1Chn2_State;//新增edma_chn_state_t dmaController1Chn3_State;//新增edma_chn_state_t * const edmaChnStateArray[] = {&dmaController1Chn0_State,&dmaController1Chn1_State,&dmaController1Chn2_State,//新增&dmaController1Chn3_State//新增
};edma_channel_config_t dmaController1Chn0_Config = {.channelPriority = EDMA_CHN_DEFAULT_PRIORITY,.virtChnConfig = EDMA_CHN0_NUMBER,.source = EDMA_REQ_LPSPI0_RX,.callback = NULL,.callbackParam = NULL,.enableTrigger = false
};
edma_channel_config_t dmaController1Chn1_Config = {.channelPriority = EDMA_CHN_DEFAULT_PRIORITY,.virtChnConfig = EDMA_CHN1_NUMBER,.source = EDMA_REQ_LPSPI0_TX,.callback = NULL,.callbackParam = NULL,.enableTrigger = false
};
edma_channel_config_t dmaController1Chn2_Config = {//新增.channelPriority = EDMA_CHN_DEFAULT_PRIORITY,.virtChnConfig = EDMA_CHN2_NUMBER,.source = EDMA_REQ_LPUART2_RX,.callback = NULL,.callbackParam = NULL,.enableTrigger = false
};
edma_channel_config_t dmaController1Chn3_Config = {//新增.channelPriority = EDMA_CHN_DEFAULT_PRIORITY,.virtChnConfig = EDMA_CHN3_NUMBER,.source = EDMA_REQ_LPUART2_TX,.callback = NULL,.callbackParam = NULL,.enableTrigger = false
};
const edma_channel_config_t * const edmaChnConfigArray[] = {&dmaController1Chn0_Config,&dmaController1Chn1_Config,&dmaController1Chn2_Config,//新增&dmaController1Chn3_Config//新增
};UART2配置里面DMA通道也要响应地进行配置
![]()
生成的代码就会有对应的改变
/*! lpuart2 configuration structure */
const lpuart_user_config_t lpuart2_InitConfig0 = {.transferType = LPUART_USING_DMA,.baudRate = 115200U,.parityMode = LPUART_PARITY_DISABLED,.stopBitCount = LPUART_ONE_STOP_BIT,.bitCountPerChar = LPUART_8_BITS_PER_CHAR,.rxDMAChannel = 2U,//DMA接收通道.txDMAChannel = 3U,//DMA发送通道
};波特率大家都懂,Clock configuration是用来根据设置的波特率来计算出实际波特率的,一般写0就好。它有自己的一套算法,考虑到波特率漂移的情况。设置波特率比较低的时候,实际波特率跟设置波特率一致。设置波特率较高的时候,实际波特率会逐渐跟设置波特率拉开。
Clock configuration和实际波特率都不会体现在代码上,只是给你个参考,譬如你的串口工具如果波特率设置为115200的话,就容易出现乱码,设置为115942的时候性能就会稳定很多。

校验模式可以选择奇校验、偶校验和不校验。disabled不校验校验位是0个,EVEN偶校验1位,ODD奇校验一位。
/*! @brief LPUART number of bits in a character** Implements : lpuart_bit_count_per_char_t_Class*/
typedef enum
{LPUART_8_BITS_PER_CHAR = 0x0U, /*!< 8-bit data characters */LPUART_9_BITS_PER_CHAR = 0x1U, /*!< 9-bit data characters */LPUART_10_BITS_PER_CHAR = 0x2U /*!< 10-bit data characters */
} lpuart_bit_count_per_char_t;停止位长度、数据位长度两个也是很常见的了,在这里不再赘述。
接口使用
生成的接口在lpuart_driver.c文件和lpuart_driver.h文件里面,这个文件不在Generated_Code路径下面,而是在SDK\platform\drivers\src\lpuart和SDK\platform\drivers\inc里面。
LPUART_DRV_GetDefaultConfig
获取默认配置
/*FUNCTION************************************************************************ Function Name : LPUART_DRV_GetDefaultConfig* Description : Initializes the LPUART configuration structure with* default values.** Implements : LPUART_DRV_GetDefaultConfig_Activity*END**************************************************************************/
void LPUART_DRV_GetDefaultConfig(lpuart_user_config_t * lpuartUserConfig)
{DEV_ASSERT(lpuartUserConfig != NULL);lpuartUserConfig->transferType = LPUART_USING_INTERRUPTS;lpuartUserConfig->baudRate = 9600U;lpuartUserConfig->parityMode = LPUART_PARITY_DISABLED;lpuartUserConfig->stopBitCount = LPUART_ONE_STOP_BIT;lpuartUserConfig->bitCountPerChar = LPUART_8_BITS_PER_CHAR;lpuartUserConfig->rxDMAChannel = 0U;lpuartUserConfig->txDMAChannel = 0U;
}LPUART_DRV_Init
初始化函数,第一个入参是驱动序号,在lpuart.h里面定义的,第二个入参是驱动状态结构体,第三个入参是配置结构体。
/*FUNCTION************************************************************************ Function Name : LPUART_DRV_Init* Description : This function initializes a LPUART instance for operation.* This function will initialize the run-time state structure to keep track of* the on-going transfers, ungate the clock to the LPUART module, initialize the* module to user defined settings and default settings, configure the IRQ state* structure and enable the module-level interrupt to the core, and enable the* LPUART module transmitter and receiver.* The following is an example of how to set up the lpuart_state_t and the* lpuart_user_config_t parameters and how to call the LPUART_DRV_Init function* by passing in these parameters:* lpuart_user_config_t lpuartConfig;* lpuartConfig.baudRate = 9600;* lpuartConfig.bitCountPerChar = LPUART_8_BITS_PER_CHAR;* lpuartConfig.parityMode = LPUART_PARITY_DISABLED;* lpuartConfig.stopBitCount = LPUART_ONE_STOP_BIT;* lpuartConfig.transferType = LPUART_USING_INTERRUPTS;* lpuart_state_t lpuartState;* LPUART_DRV_Init(instance, &lpuartState, &lpuartConfig);** Implements : LPUART_DRV_Init_Activity*END**************************************************************************/
status_t LPUART_DRV_Init(uint32_t instance, lpuart_state_t * lpuartStatePtr,const lpuart_user_config_t * lpuartUserConfig)
{DEV_ASSERT(instance < LPUART_INSTANCE_COUNT);DEV_ASSERT(lpuartStatePtr != NULL);DEV_ASSERT(lpuartUserConfig != NULL);status_t osStatusRxSem;status_t osStatusTxSem;LPUART_Type * base = s_lpuartBase[instance];uint32_t idx;uint32_t lpuartSourceClock;clock_names_t instanceClkName = s_lpuartClkNames[instance];/* Get the LPUART clock as configured in the clock manager */(void)CLOCK_SYS_GetFreq(instanceClkName, &lpuartSourceClock);/* Check if current instance is clock gated off. */DEV_ASSERT(lpuartSourceClock > 0U);/* Check if current instance is already initialized. */DEV_ASSERT(s_lpuartStatePtr[instance] == NULL);#if FEATURE_LPUART_HAS_DMA_ENABLE/* In DMA mode, only 8-bits chars are supported */DEV_ASSERT((lpuartUserConfig->transferType != LPUART_USING_DMA) ||(lpuartUserConfig->bitCountPerChar == LPUART_8_BITS_PER_CHAR));
#endif/* For 10 bits per char, parity bit cannot be enabled */DEV_ASSERT((lpuartUserConfig->bitCountPerChar != LPUART_10_BITS_PER_CHAR) ||(lpuartUserConfig->parityMode == LPUART_PARITY_DISABLED));/* Clear the state struct for this instance. */uint8_t *clearStructPtr = (uint8_t *)lpuartStatePtr;for (idx = 0; idx < sizeof(lpuart_state_t); idx++){clearStructPtr[idx] = 0;}/* Save runtime structure pointer.*/s_lpuartStatePtr[instance] = lpuartStatePtr;/* Save the transfer information for runtime retrieval */lpuartStatePtr->transferType = lpuartUserConfig->transferType;lpuartStatePtr->bitCountPerChar = lpuartUserConfig->bitCountPerChar;
#if FEATURE_LPUART_HAS_DMA_ENABLElpuartStatePtr->rxDMAChannel = lpuartUserConfig->rxDMAChannel;lpuartStatePtr->txDMAChannel = lpuartUserConfig->txDMAChannel;
#endif/* initialize the LPUART instance */LPUART_Init(base);/* initialize the parameters of the LPUART config structure with desired data */(void)LPUART_DRV_SetBaudRate(instance, lpuartUserConfig->baudRate);if (lpuartUserConfig->parityMode != LPUART_PARITY_DISABLED){LPUART_SetBitCountPerChar(base, lpuartUserConfig->bitCountPerChar, true);}else{LPUART_SetBitCountPerChar(base, lpuartUserConfig->bitCountPerChar, false);}LPUART_SetParityMode(base, lpuartUserConfig->parityMode);LPUART_SetStopBitCount(base, lpuartUserConfig->stopBitCount);/* initialize last driver operation status */lpuartStatePtr->transmitStatus = STATUS_SUCCESS;lpuartStatePtr->receiveStatus = STATUS_SUCCESS;/* Create the synchronization objects */osStatusRxSem = OSIF_SemaCreate(&lpuartStatePtr->rxComplete, 0);osStatusTxSem = OSIF_SemaCreate(&lpuartStatePtr->txComplete, 0);if ((osStatusRxSem == STATUS_ERROR) || (osStatusTxSem == STATUS_ERROR)){return STATUS_ERROR;}/* Install LPUART irq handler */INT_SYS_InstallHandler(s_lpuartRxTxIrqId[instance], g_lpuartIsr[instance], (isr_t*) 0);/* Enable LPUART interrupt. */INT_SYS_EnableIRQ(s_lpuartRxTxIrqId[instance]);return STATUS_SUCCESS;
}初始化的时候会把g_lpuartIsr[]安装进去UART,里面有对应的接收中断
/* Array storing references to LPUART irq handlers */
isr_t g_lpuartIsr[LPUART_INSTANCE_COUNT] =
{
#if (LPUART_INSTANCE_COUNT > 0U)LPUART0_IrqHandler,
#endif
#if (LPUART_INSTANCE_COUNT > 1U)LPUART1_IrqHandler,
#endif
#if (LPUART_INSTANCE_COUNT > 2U)LPUART2_IrqHandler,
#endif
#if (LPUART_INSTANCE_COUNT > 3U)LPUART3_IrqHandler,
#endif
};譬如这个UART2中断,默认是调用LPUART_DRV_IRQHandler
/* Implementation of LPUART2 handler named in startup code. */
void LPUART2_IrqHandler(void)
{//LPUART_DRV_IRQHandler(2);DebugUart_IRQHandler();
}LPUART_DRV_Deinit
逆初始化
/*FUNCTION************************************************************************ Function Name : LPUART_DRV_Deinit* Description : This function shuts down the UART by disabling interrupts and* transmitter/receiver.** Implements : LPUART_DRV_Deinit_Activity*END**************************************************************************/
status_t LPUART_DRV_Deinit(uint32_t instance)
{DEV_ASSERT(instance < LPUART_INSTANCE_COUNT);clock_names_t instanceClkName = s_lpuartClkNames[instance];uint32_t lpuartSourceClock;const LPUART_Type * base = s_lpuartBase[instance];const lpuart_state_t * lpuartState = (lpuart_state_t *)s_lpuartStatePtr[instance];(void)CLOCK_SYS_GetFreq(instanceClkName, &lpuartSourceClock);/* Check if current instance is already de-initialized or is gated.*/DEV_ASSERT(s_lpuartStatePtr[instance] != NULL);DEV_ASSERT(lpuartSourceClock > 0U);/* Wait until the data is completely shifted out of shift register */while (!LPUART_GetStatusFlag(base, LPUART_TX_COMPLETE)) {}/* Destroy the synchronization objects */(void)OSIF_SemaDestroy(&lpuartState->rxComplete);(void)OSIF_SemaDestroy(&lpuartState->txComplete);/* Disable LPUART interrupt. */INT_SYS_DisableIRQ(s_lpuartRxTxIrqId[instance]);/* Restore default handler. */INT_SYS_InstallHandler(s_lpuartRxTxIrqId[instance], DefaultISR, (isr_t*) 0);/* Clear our saved pointer to the state structure */s_lpuartStatePtr[instance] = NULL;return STATUS_SUCCESS;
}LPUART_DRV_InstallRxCallback
安装接收到回调后进入的函数,譬如下面这个UART2收到数据之后就会进入回调函数rxCallback里面。
LPUART_DRV_InstallRxCallback(INST_LPUART2, rxCallback, NULL);函数定义
/*FUNCTION************************************************************************ Function Name : LPUART_DRV_InstallRxCallback* Description : Install receive data callback function.** Implements : LPUART_DRV_InstallRxCallback_Activity*END**************************************************************************/
uart_callback_t LPUART_DRV_InstallRxCallback(uint32_t instance,uart_callback_t function,void * callbackParam)
{DEV_ASSERT(instance < LPUART_INSTANCE_COUNT);lpuart_state_t * lpuartState = (lpuart_state_t *)s_lpuartStatePtr[instance];uart_callback_t currentCallback = lpuartState->rxCallback;lpuartState->rxCallback = function;lpuartState->rxCallbackParam = callbackParam;return currentCallback;
}LPUART_DRV_InstallTxCallback
安装发送回调函数,也就是设定个函数,在发送数据的时候回调下,一般用不到。
/*FUNCTION************************************************************************ Function Name : LPUART_DRV_InstallTxCallback* Description : Install transmit data callback function, pass in NULL pointer* as callback will uninstall.** Implements : LPUART_DRV_InstallTxCallback_Activity*END**************************************************************************/
uart_callback_t LPUART_DRV_InstallTxCallback(uint32_t instance,uart_callback_t function,void * callbackParam)
{DEV_ASSERT(instance < LPUART_INSTANCE_COUNT);lpuart_state_t * lpuartState = (lpuart_state_t *)s_lpuartStatePtr[instance];uart_callback_t currentCallback = lpuartState->txCallback;lpuartState->txCallback = function;lpuartState->txCallbackParam = callbackParam;return currentCallback;
}LPUART_DRV_SendDataBlocking
使用阻塞的方式发送数据,阻塞的意思是,一直等待直到所有数据发送完毕/发送成功或超时。如果数据成功发送完毕,则返回成功状态码;若超时或其他错误发生,则返回相应的错误状态码。
/*FUNCTION************************************************************************ Function Name : LPUART_DRV_SendDataBlocking* Description : This function sends data out through the LPUART module using* blocking method. The function does not return until the transmit is complete.** Implements : LPUART_DRV_SendDataBlocking_Activity*END**************************************************************************/
status_t LPUART_DRV_SendDataBlocking(uint32_t instance,const uint8_t * txBuff,uint32_t txSize,uint32_t timeout)
{DEV_ASSERT(instance < LPUART_INSTANCE_COUNT);DEV_ASSERT(txBuff != NULL);lpuart_state_t * lpuartState = (lpuart_state_t *)s_lpuartStatePtr[instance];status_t retVal = STATUS_SUCCESS;status_t syncStatus;/* Indicates this is a blocking transaction. */lpuartState->isTxBlocking = true;DEV_ASSERT((lpuartState->transferType == LPUART_USING_INTERRUPTS) ||(lpuartState->transferType == LPUART_USING_DMA));if (lpuartState->transferType == LPUART_USING_INTERRUPTS){/* Start the transmission process using interrupts */retVal = LPUART_DRV_StartSendDataUsingInt(instance, txBuff, txSize);}
#if FEATURE_LPUART_HAS_DMA_ENABLEelse{/* Start the transmission process using DMA */retVal = LPUART_DRV_StartSendDataUsingDma(instance, txBuff, txSize);}
#endifif (retVal == STATUS_SUCCESS){/* Wait until the transmit is complete. */syncStatus = OSIF_SemaWait(&lpuartState->txComplete, timeout);/* Finish the transmission if timeout expired */if (syncStatus == STATUS_TIMEOUT){lpuartState->isTxBlocking = false;lpuartState->transmitStatus = STATUS_TIMEOUT;if (lpuartState->transferType == LPUART_USING_INTERRUPTS){LPUART_DRV_CompleteSendDataUsingInt(instance);}
#if FEATURE_LPUART_HAS_DMA_ENABLEelse{LPUART_DRV_StopTxDma(instance);}
#endif}}return lpuartState->transmitStatus;
}LPUART_DRV_SendDataPolling
轮询方式发送数据,轮询所有要发送的数据
/*FUNCTION************************************************************************ Function Name : LPUART_DRV_SendDataPolling* Description : Send out multiple bytes of data using polling method.** Implements : LPUART_DRV_SendDataPolling_Activity*END**************************************************************************/
status_t LPUART_DRV_SendDataPolling(uint32_t instance,const uint8_t *txBuff,uint32_t txSize)
{DEV_ASSERT(instance < LPUART_INSTANCE_COUNT);DEV_ASSERT(txBuff != NULL);LPUART_Type * base = s_lpuartBase[instance];lpuart_state_t * lpuartState = (lpuart_state_t *)s_lpuartStatePtr[instance];/* Check the validity of the parameters */DEV_ASSERT(txSize > 0U);DEV_ASSERT((lpuartState->bitCountPerChar == LPUART_8_BITS_PER_CHAR) ||((txSize & 1U) == 0U));/* Check driver is not busy transmitting data from a previous asynchronous call */if (lpuartState->isTxBusy){return STATUS_BUSY;}/* Enable the LPUART transmitter */LPUART_SetTransmitterCmd(base, true);while (txSize > 0U){while (!LPUART_GetStatusFlag(base, LPUART_TX_DATA_REG_EMPTY)){}lpuartState->txBuff = txBuff;LPUART_DRV_PutData(instance);if (lpuartState->bitCountPerChar == LPUART_8_BITS_PER_CHAR){++txBuff;--txSize;}else{++txBuff;++txBuff;txSize -= 2U;}}/* Disable the LPUART transmitter */LPUART_SetTransmitterCmd(base, false);return STATUS_SUCCESS;
}LPUART_DRV_SendData
也就是纯发数据,也叫非阻塞发送,发送的时候不会等待发送完成,闭上眼就发了。
/*FUNCTION************************************************************************ Function Name : LPUART_DRV_SendData* Description : This function sends data out through the LPUART module using* non-blocking method. The function will return immediately after calling this* function.** Implements : LPUART_DRV_SendData_Activity*END**************************************************************************/
status_t LPUART_DRV_SendData(uint32_t instance,const uint8_t * txBuff,uint32_t txSize)
{DEV_ASSERT(instance < LPUART_INSTANCE_COUNT);DEV_ASSERT(txBuff != NULL);status_t retVal = STATUS_SUCCESS;lpuart_state_t * lpuartState = (lpuart_state_t *)s_lpuartStatePtr[instance];/* Indicates this is a non-blocking transaction. */lpuartState->isTxBlocking = false;DEV_ASSERT((lpuartState->transferType == LPUART_USING_INTERRUPTS) ||(lpuartState->transferType == LPUART_USING_DMA));if (lpuartState->transferType == LPUART_USING_INTERRUPTS){/* Start the transmission process using interrupts */retVal = LPUART_DRV_StartSendDataUsingInt(instance, txBuff, txSize);}
#if FEATURE_LPUART_HAS_DMA_ENABLEelse{/* Start the transmission process using DMA */retVal = LPUART_DRV_StartSendDataUsingDma(instance, txBuff, txSize);}
#endifreturn retVal;
}LPUART_DRV_GetTransmitStatus
在非阻塞的时候获取发送状态,在忙或者发送完成。
/*FUNCTION************************************************************************ Function Name : LPUART_DRV_GetTransmitStatus* Description : This function returns whether the previous LPUART transmit has* finished. When performing non-blocking transmit, the user can call this* function to ascertain the state of the current transmission:* in progress (or busy) or complete (success). In addition, if the transmission* is still in progress, the user can obtain the number of words that have been* currently transferred.** Implements : LPUART_DRV_GetTransmitStatus_Activity*END**************************************************************************/
status_t LPUART_DRV_GetTransmitStatus(uint32_t instance, uint32_t * bytesRemaining)
{DEV_ASSERT(instance < LPUART_INSTANCE_COUNT);const lpuart_state_t * lpuartState = (lpuart_state_t *)s_lpuartStatePtr[instance];if (bytesRemaining != NULL){if (lpuartState->isTxBusy){/* Fill in the bytes not transferred yet. */if (lpuartState->transferType == LPUART_USING_INTERRUPTS){/* In interrupt-based communication, the remaining bytes are retrieved* from the state structure*/*bytesRemaining = lpuartState->txSize;;}
#if FEATURE_LPUART_HAS_DMA_ENABLEelse{/* In DMA-based communication, the remaining bytes are retrieved* from the current DMA major loop count*/*bytesRemaining = EDMA_DRV_GetRemainingMajorIterationsCount(lpuartState->txDMAChannel);}
#endif}else{*bytesRemaining = 0;}}return lpuartState->transmitStatus;
}LPUART_DRV_AbortSendingData
中断发送数据
/*FUNCTION************************************************************************ Function Name : LPUART_DRV_AbortSendingData* Description : This function terminates an non-blocking LPUART transmission* early. During a non-blocking LPUART transmission, the user has the option to* terminate the transmission early if the transmission is still in progress.** Implements : LPUART_DRV_AbortSendingData_Activity*END**************************************************************************/
status_t LPUART_DRV_AbortSendingData(uint32_t instance)
{DEV_ASSERT(instance < LPUART_INSTANCE_COUNT);lpuart_state_t * lpuartState = (lpuart_state_t *)s_lpuartStatePtr[instance];/* Check if a transfer is running. */if (!lpuartState->isTxBusy){return STATUS_SUCCESS;}/* Update the tx status */lpuartState->transmitStatus = STATUS_UART_ABORTED;/* Stop the running transfer. */if (lpuartState->transferType == LPUART_USING_INTERRUPTS){LPUART_DRV_CompleteSendDataUsingInt(instance);}
#if FEATURE_LPUART_HAS_DMA_ENABLEelse{LPUART_DRV_StopTxDma(instance);}
#endifreturn STATUS_SUCCESS;
}LPUART_DRV_ReceiveDataBlocking
阻塞模式接收数据,一直等待接收完毕。
/*FUNCTION************************************************************************ Function Name : LPUART_DRV_ReceiveDataBlocking* Description : This function receives data from LPUART module using blocking* method, the function does not return until the receive is complete.** Implements : LPUART_DRV_ReceiveDataBlocking_Activity*END**************************************************************************/
status_t LPUART_DRV_ReceiveDataBlocking(uint32_t instance,uint8_t * rxBuff,uint32_t rxSize,uint32_t timeout)
{DEV_ASSERT(instance < LPUART_INSTANCE_COUNT);DEV_ASSERT(rxBuff != NULL);lpuart_state_t * lpuartState = (lpuart_state_t *)s_lpuartStatePtr[instance];status_t retVal = STATUS_SUCCESS;status_t syncStatus;/* Indicates this is a blocking transaction. */lpuartState->isRxBlocking = true;DEV_ASSERT((lpuartState->transferType == LPUART_USING_INTERRUPTS) ||(lpuartState->transferType == LPUART_USING_DMA));if (lpuartState->transferType == LPUART_USING_INTERRUPTS){/* Start the reception process using interrupts */retVal = LPUART_DRV_StartReceiveDataUsingInt(instance, rxBuff, rxSize);}
#if FEATURE_LPUART_HAS_DMA_ENABLEelse{/* Start the reception process using DMA */retVal = LPUART_DRV_StartReceiveDataUsingDma(instance, rxBuff, rxSize);}
#endifif (retVal == STATUS_SUCCESS){/* Wait until the receive is complete. */syncStatus = OSIF_SemaWait(&lpuartState->rxComplete, timeout);/* Finish the reception if timeout expired */if (syncStatus == STATUS_TIMEOUT){lpuartState->isRxBlocking = false;lpuartState->receiveStatus = STATUS_TIMEOUT;if (lpuartState->transferType == LPUART_USING_INTERRUPTS){LPUART_DRV_CompleteReceiveDataUsingInt(instance);}
#if FEATURE_LPUART_HAS_DMA_ENABLEelse{LPUART_DRV_StopRxDma(instance);}
#endif}}return lpuartState->receiveStatus;
}LPUART_DRV_ReceiveDataPolling
轮询模式接收数据
/*FUNCTION************************************************************************ Function Name : LPUART_DRV_ReceiveDataPolling* Description : Receive multiple bytes of data using polling method.** Implements : LPUART_DRV_ReceiveDataPolling_Activity*END**************************************************************************/
status_t LPUART_DRV_ReceiveDataPolling(uint32_t instance,uint8_t *rxBuff,uint32_t rxSize)
{DEV_ASSERT(instance < LPUART_INSTANCE_COUNT);DEV_ASSERT(rxBuff != NULL);uint8_t tmpByte;status_t retVal = STATUS_SUCCESS;status_t tmpState = STATUS_SUCCESS;LPUART_Type * base = s_lpuartBase[instance];lpuart_state_t * lpuartState = (lpuart_state_t *)s_lpuartStatePtr[instance];/* Check the validity of the parameters */DEV_ASSERT(rxSize > 0U);DEV_ASSERT((lpuartState->bitCountPerChar == LPUART_8_BITS_PER_CHAR) ||((rxSize & 1U) == 0U));/* Check driver is not busy receiving data from a previous asynchronous call */if (lpuartState->isRxBusy){return STATUS_BUSY;}/* Enable the LPUART receiver */LPUART_SetReceiverCmd((LPUART_Type *)base, true);while (rxSize > 0U){while (!LPUART_GetStatusFlag(base, LPUART_RX_DATA_REG_FULL)){}lpuartState->rxBuff = rxBuff;LPUART_DRV_GetData(instance);if (lpuartState->bitCountPerChar == LPUART_8_BITS_PER_CHAR){++rxBuff;--rxSize;}else{++rxBuff;++rxBuff;rxSize -= 2U;}/* Check for errors on received data */if (LPUART_GetStatusFlag(base, LPUART_FRAME_ERR)){tmpState = STATUS_UART_FRAMING_ERROR;/* Disable the LPUART receiver */LPUART_SetReceiverCmd((LPUART_Type *)base, false);/* Clear the flag */(void)LPUART_ClearStatusFlag(base, LPUART_FRAME_ERR);break;}else if (LPUART_GetStatusFlag(base, LPUART_NOISE_DETECT)){tmpState = STATUS_UART_NOISE_ERROR;/* Disable the LPUART receiver */LPUART_SetReceiverCmd((LPUART_Type *)base, false);/* Clear the flag */(void)LPUART_ClearStatusFlag(base, LPUART_NOISE_DETECT);break;}else if (LPUART_GetStatusFlag(base, LPUART_PARITY_ERR)){tmpState = STATUS_UART_PARITY_ERROR;/* Disable the LPUART receiver */LPUART_SetReceiverCmd((LPUART_Type *)base, false);/* Clear the flag */(void)LPUART_ClearStatusFlag(base, LPUART_PARITY_ERR);break;}else if (LPUART_GetStatusFlag(base, LPUART_RX_OVERRUN)){tmpState = STATUS_UART_RX_OVERRUN;/* Disable the LPUART receiver */LPUART_SetReceiverCmd((LPUART_Type *)base, false);/* Clear the flag */(void)LPUART_ClearStatusFlag(base, LPUART_RX_OVERRUN);break;}else{/* No error condition - avoid MISRA violation */}}/* Update received status */if ((rxSize == 0U) && (tmpState == STATUS_UART_RX_OVERRUN)){retVal = STATUS_SUCCESS;}else{retVal = tmpState;}if (retVal == STATUS_SUCCESS){/* Disable the LPUART receiver */LPUART_SetReceiverCmd((LPUART_Type *)base, false);}/* Read dummy to clear RDRF flag */LPUART_Getchar(base, &tmpByte);return retVal;
}LPUART_DRV_ReceiveData
纯接收数据
/*FUNCTION************************************************************************ Function Name : LPUART_DRV_ReceiveData* Description : This function receives data from LPUART module using* non-blocking method. This function returns immediately after initiating the* receive function. The application has to get the receive status to see when* the receive is complete. In other words, after calling non-blocking get* function, the application must get the receive status to check if receive* is completed or not.** Implements : LPUART_DRV_ReceiveData_Activity*END**************************************************************************/
status_t LPUART_DRV_ReceiveData(uint32_t instance,uint8_t * rxBuff,uint32_t rxSize)
{DEV_ASSERT(instance < LPUART_INSTANCE_COUNT);DEV_ASSERT(rxBuff != NULL);status_t retVal = STATUS_SUCCESS;lpuart_state_t * lpuartState = (lpuart_state_t *)s_lpuartStatePtr[instance];/* Indicates this is a non-blocking transaction. */lpuartState->isRxBlocking = false;DEV_ASSERT((lpuartState->transferType == LPUART_USING_INTERRUPTS) ||(lpuartState->transferType == LPUART_USING_DMA));if (lpuartState->transferType == LPUART_USING_INTERRUPTS){/* Start the reception process using interrupts */retVal = LPUART_DRV_StartReceiveDataUsingInt(instance, rxBuff, rxSize);}
#if FEATURE_LPUART_HAS_DMA_ENABLEelse{/* Start the reception process using DMA */retVal = LPUART_DRV_StartReceiveDataUsingDma(instance, rxBuff, rxSize);}
#endifreturn retVal;
}LPUART_DRV_GetReceiveStatus
获取接收状态,正在接收还是接收完成。
/*FUNCTION************************************************************************ Function Name : LPUART_DRV_GetReceiveStatus* Description : This function returns whether the previous LPUART receive is* complete. When performing a non-blocking receive, the user can call this* function to ascertain the state of the current receive progress: in progress* or complete. In addition, if the receive is still in progress, the user can* obtain the number of words that have been currently received.** Implements : LPUART_DRV_GetReceiveStatus_Activity*END**************************************************************************/
status_t LPUART_DRV_GetReceiveStatus(uint32_t instance,uint32_t * bytesRemaining)
{DEV_ASSERT(instance < LPUART_INSTANCE_COUNT);const lpuart_state_t * lpuartState = (lpuart_state_t *)s_lpuartStatePtr[instance];if (bytesRemaining != NULL){if (lpuartState->isRxBusy){/* Fill in the bytes transferred. */if (lpuartState->transferType == LPUART_USING_INTERRUPTS){/* In interrupt-based communication, the remaining bytes are retrieved* from the state structure*/*bytesRemaining = lpuartState->rxSize;}
#if FEATURE_LPUART_HAS_DMA_ENABLEelse{/* In DMA-based communication, the remaining bytes are retrieved* from the current DMA major loop count*/*bytesRemaining = EDMA_DRV_GetRemainingMajorIterationsCount(lpuartState->rxDMAChannel);}
#endif}else{*bytesRemaining = 0;}}return lpuartState->receiveStatus;
}LPUART_DRV_AbortReceivingData
终止接收数据
/*FUNCTION************************************************************************ Function Name : LPUART_DRV_AbortReceivingData* Description : Terminates a non-blocking receive early.** Implements : LPUART_DRV_AbortReceivingData_Activity*END**************************************************************************/
status_t LPUART_DRV_AbortReceivingData(uint32_t instance)
{DEV_ASSERT(instance < LPUART_INSTANCE_COUNT);lpuart_state_t * lpuartState = (lpuart_state_t *)s_lpuartStatePtr[instance];/* Check if a transfer is running. */if (!lpuartState->isRxBusy){return STATUS_SUCCESS;}/* Update the rx status */lpuartState->receiveStatus = STATUS_UART_ABORTED;/* Stop the running transfer. */if (lpuartState->transferType == LPUART_USING_INTERRUPTS){LPUART_DRV_CompleteReceiveDataUsingInt(instance);}
#if FEATURE_LPUART_HAS_DMA_ENABLEelse{LPUART_DRV_StopRxDma(instance);}
#endifreturn STATUS_SUCCESS;
}LPUART_DRV_SetBaudRate
设置波特率
/*FUNCTION************************************************************************ Function Name : LPUART_DRV_SetBaudRate* Description : Configures the LPUART baud rate.* In some LPUART instances the user must disable the transmitter/receiver* before calling this function.* Generally, this may be applied to all LPUARTs to ensure safe operation.** Implements : LPUART_DRV_SetBaudRate_Activity*END**************************************************************************/
status_t LPUART_DRV_SetBaudRate(uint32_t instance, uint32_t desiredBaudRate)
{DEV_ASSERT(instance < LPUART_INSTANCE_COUNT);uint16_t sbr, sbrTemp, i;uint32_t osr, tempDiff, calculatedBaud, baudDiff;uint32_t lpuartSourceClock;clock_names_t instanceClkName = s_lpuartClkNames[instance];LPUART_Type * base = s_lpuartBase[instance];const lpuart_state_t * lpuartState;lpuartState = (lpuart_state_t *)s_lpuartStatePtr[instance];if (lpuartState != NULL){/* Check if there is an ongoing transfer */if (lpuartState->isTxBusy == true){return STATUS_BUSY;}if (lpuartState->isRxBusy == true){return STATUS_BUSY;}}/* Get the LPUART clock as configured in the clock manager */(void)CLOCK_SYS_GetFreq(instanceClkName, &lpuartSourceClock);/* Check if current instance is clock gated off. */DEV_ASSERT(lpuartSourceClock > 0U);/* Check if the desired baud rate can be configured with the current protocol clock. */DEV_ASSERT(lpuartSourceClock >= (desiredBaudRate * 4U));/* This lpuart instantiation uses a slightly different baud rate calculation* The idea is to use the best OSR (over-sampling rate) possible* Note, osr is typically hard-set to 16 in other lpuart instantiations* First calculate the baud rate using the minimum OSR possible (4) */osr = 4;sbr = (uint16_t)(lpuartSourceClock / (desiredBaudRate * osr));calculatedBaud = (lpuartSourceClock / (osr * sbr));if (calculatedBaud > desiredBaudRate){baudDiff = calculatedBaud - desiredBaudRate;}else{baudDiff = desiredBaudRate - calculatedBaud;}/* loop to find the best osr value possible, one that generates minimum baudDiff* iterate through the rest of the supported values of osr */for (i = 5U; i <= 32U; i++){/* calculate the temporary sbr value */sbrTemp = (uint16_t)(lpuartSourceClock / (desiredBaudRate * i));/* calculate the baud rate based on the temporary osr and sbr values */calculatedBaud = (lpuartSourceClock / (i * sbrTemp));if (calculatedBaud > desiredBaudRate){tempDiff = calculatedBaud - desiredBaudRate;}else{tempDiff = desiredBaudRate - calculatedBaud;}if (tempDiff <= baudDiff){baudDiff = tempDiff;osr = i; /* update and store the best osr value calculated */sbr = sbrTemp; /* update store the best sbr value calculated */}}/* Check if osr is between 4x and 7x oversampling.* If so, then "BOTHEDGE" sampling must be turned on */if (osr < 8U){LPUART_EnableBothEdgeSamplingCmd(base);}/* program the osr value (bit value is one less than actual value) */LPUART_SetOversamplingRatio(base, (osr - 1U));/* write the sbr value to the BAUD registers */LPUART_SetBaudRateDivisor(base, sbr);return STATUS_SUCCESS;
}LPUART_DRV_GetBaudRate
获取波特率
/*FUNCTION************************************************************************ Function Name : LPUART_DRV_GetBaudRate* Description : Returns the LPUART configured baud rate.** Implements : LPUART_DRV_GetBaudRate_Activity*END**************************************************************************/
void LPUART_DRV_GetBaudRate(uint32_t instance, uint32_t * configuredBaudRate)
{DEV_ASSERT(instance < LPUART_INSTANCE_COUNT);DEV_ASSERT(configuredBaudRate != NULL);uint8_t osr;uint16_t sbr;uint32_t lpuartSourceClock;clock_names_t instanceClkName = s_lpuartClkNames[instance];const LPUART_Type * base = s_lpuartBase[instance];/* Get the LPUART clock as configured in the clock manager */(void)CLOCK_SYS_GetFreq(instanceClkName, &lpuartSourceClock);osr = LPUART_GetOversamplingRatio(base);sbr = LPUART_GetBaudRateDivisor(base);*configuredBaudRate = (lpuartSourceClock / ((osr + 1UL) * sbr));
}LPUART_DRV_SetTxBuffer
设置发送缓冲区
/*FUNCTION************************************************************************ Function Name : LPUART_DRV_SetTxBuffer* Description : Sets the driver internal reference to the tx buffer.* Can be called from the tx callback to provide a different* buffer for continuous transmission.** Implements : LPUART_DRV_SetTxBuffer_Activity*END**************************************************************************/
status_t LPUART_DRV_SetTxBuffer(uint32_t instance,const uint8_t * txBuff,uint32_t txSize)
{DEV_ASSERT(instance < LPUART_INSTANCE_COUNT);DEV_ASSERT(txBuff != NULL);DEV_ASSERT(txSize > 0U);lpuart_state_t * lpuartState = (lpuart_state_t *)s_lpuartStatePtr[instance];lpuartState->txBuff = txBuff;lpuartState->txSize = txSize;return STATUS_SUCCESS;
}LPUART_DRV_SetRxBuffer
将接收到的数据放入接收缓冲区,也就是接收buffer。一般在接收回调函数里面执行该函数。
/*FUNCTION************************************************************************ Function Name : LPUART_DRV_SetRxBuffer* Description : Sets the driver internal reference to the rx buffer.* Can be called from the rx callback to provide a different* buffer for continuous reception.** Implements : LPUART_DRV_SetRxBuffer_Activity*END**************************************************************************/
status_t LPUART_DRV_SetRxBuffer(uint32_t instance,uint8_t * rxBuff,uint32_t rxSize)
{DEV_ASSERT(instance < LPUART_INSTANCE_COUNT);DEV_ASSERT(rxBuff != NULL);DEV_ASSERT(rxSize > 0U);lpuart_state_t * lpuartState = (lpuart_state_t *)s_lpuartStatePtr[instance];lpuartState->rxBuff = rxBuff;lpuartState->rxSize = rxSize;return STATUS_SUCCESS;
}


![[c++] char * 和 std::string](https://img-blog.csdnimg.cn/direct/41d882545669454391caf4a37bc6e6dd.png)