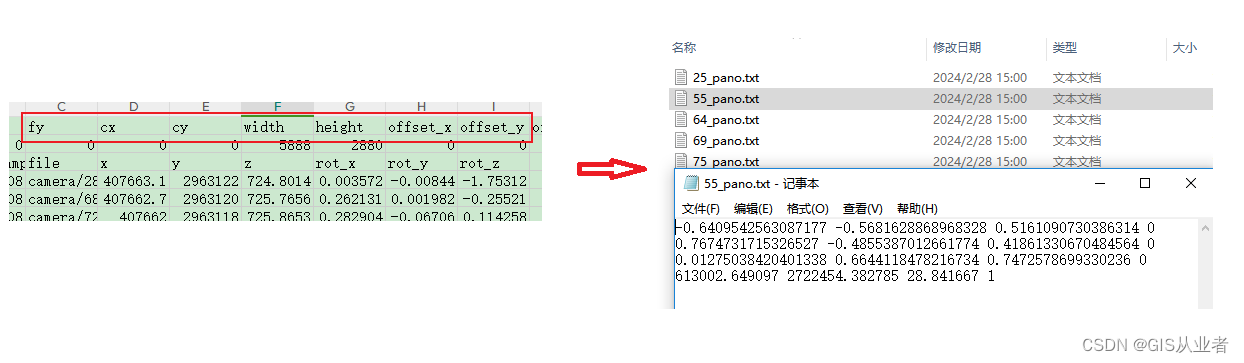
python脚本实现全景站点欧拉角转矩阵
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.rhkb.cn/news/265773.html
如若内容造成侵权/违法违规/事实不符,请联系长河编程网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章
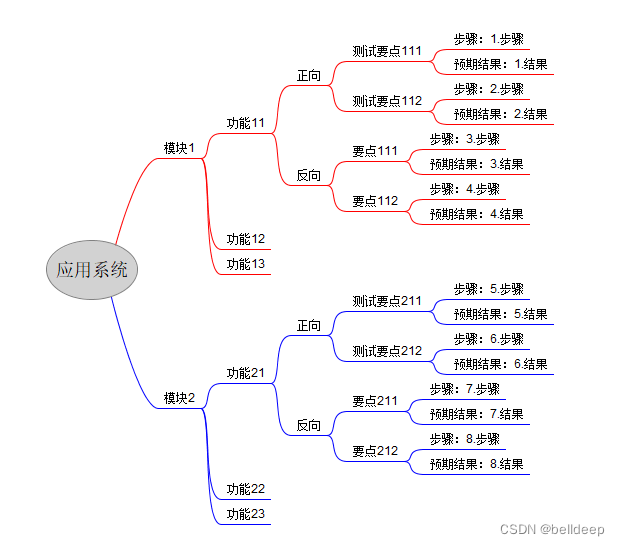
groovy:XmlParser 读 Freeplane.mm文件,生成测试案例.csv文件
Freeplane 是一款基于 Java 的开源软件,继承 Freemind 的思维导图工具软件,它扩展了知识管理功能,在 Freemind 上增加了一些额外的功能,比如数学公式、节点属性面板等。 强大的节点功能,不仅仅节点的种类很多ÿ…
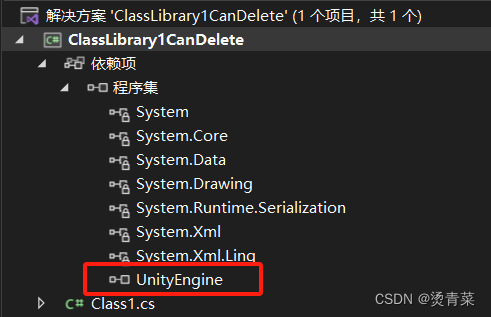
Unity | 动态读取C#程序集实现热更新
目录
一、动态语言
二、创建C#dll
1.VS中创建一个C#语言的库工程
2.添加UnityEngine.dll的依赖
3.编写代码,生成dll
三、Unity使用dll 一、动态语言 计算机编程语言可以根据它们如何将源代码转换为可以执行的代码来分类为静态语言和动态语言。
静态语言&…

工业设备生命周期的预测算法
设备生命周期的预测算法是一种运用数学模型和统计分析方法,对设备从投入使用到报废的整个生命周期进行预测的技术。这种预测对于资产管理、成本控制、维护计划制定等方面具有重要意义。常见的设备生命周期预测算法包括以下几种,希望对大家有所帮助。北京…
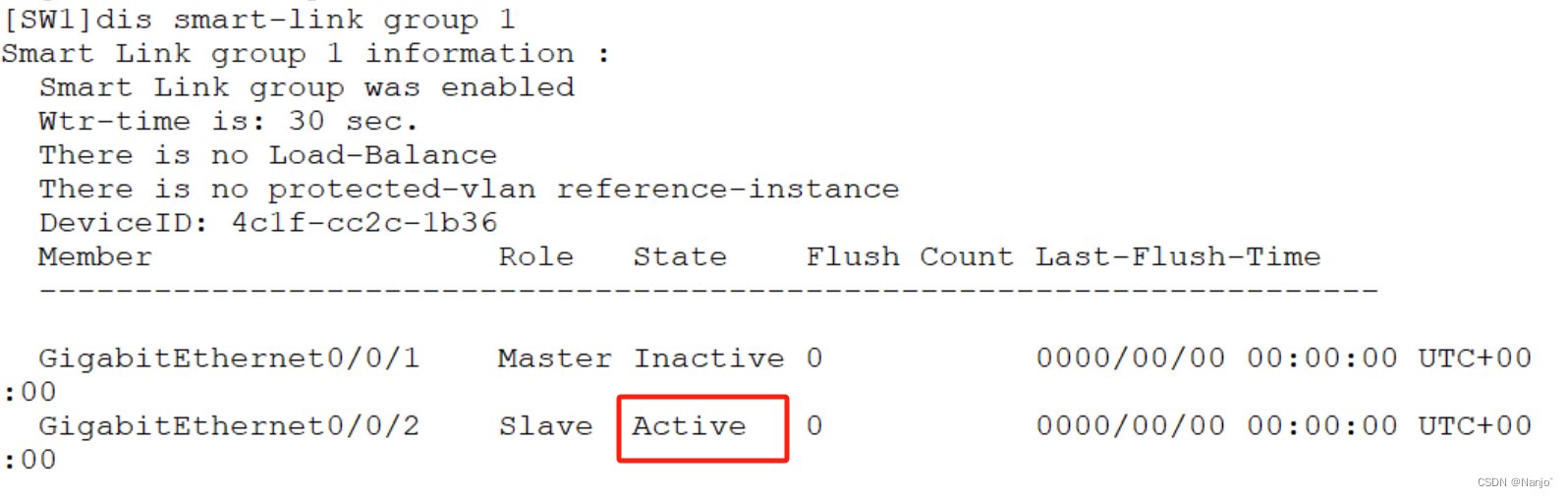
单点故障解决方案之Smart Link与Monitor Link
-SmartLink技术,创建Smart Link 组。在该组中,加入两个端口。其中1个端口是主端口,也称之为Master端口。另外1个端口是备份端口:也称之为 Slave 端口。 -Monitor Link 组也称之为“监控链路组,由上行端口和下行端口共同组成。下行…
Linux系统——Nginx拓展
目录
一、重写功能——rewrite
1.if
1.1 if
2. return
2.1状态码301和302的区别
301
302
3. set
4. break
5. rewrite
5.1 rewrite flag使用
5.2 flag说明
5.3举例
5.3.1访问 bj 跳转 beijing
5.3.2举例——break
5.3.3 http 转 https
5.3.4 break 与 last
…
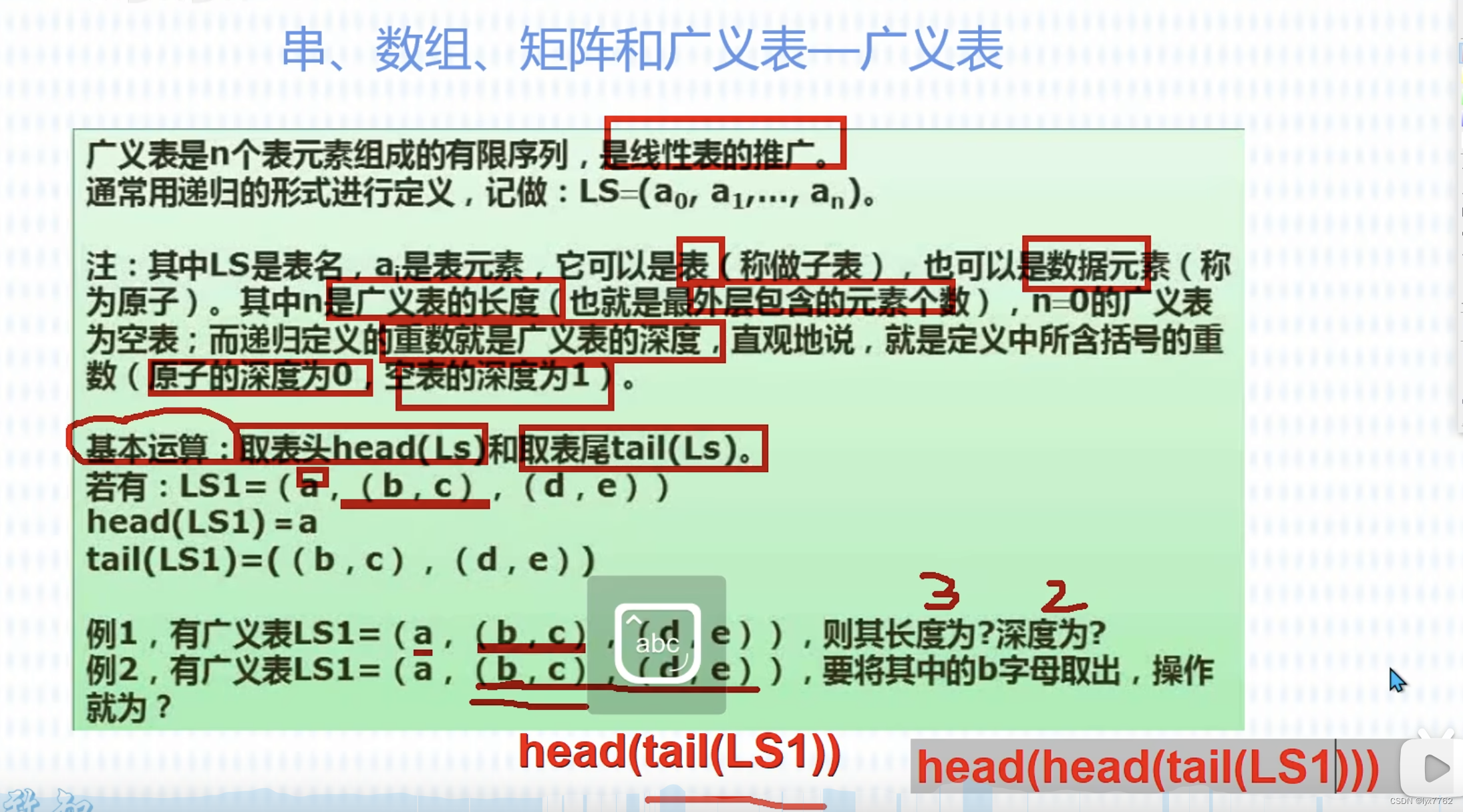
【DAY05 软考中级备考笔记】线性表,栈和队列,串数组矩阵和广义表
线性表,栈和队列,串数组矩阵和广义表 2月28日 – 天气:阴转晴 时隔好几天没有学习了,今天补上。明天发工资,开心😄 1. 线性表
1.1 线性表的结构
首先线性表的结构分为物理结构和逻辑结构
物理结构按照实…
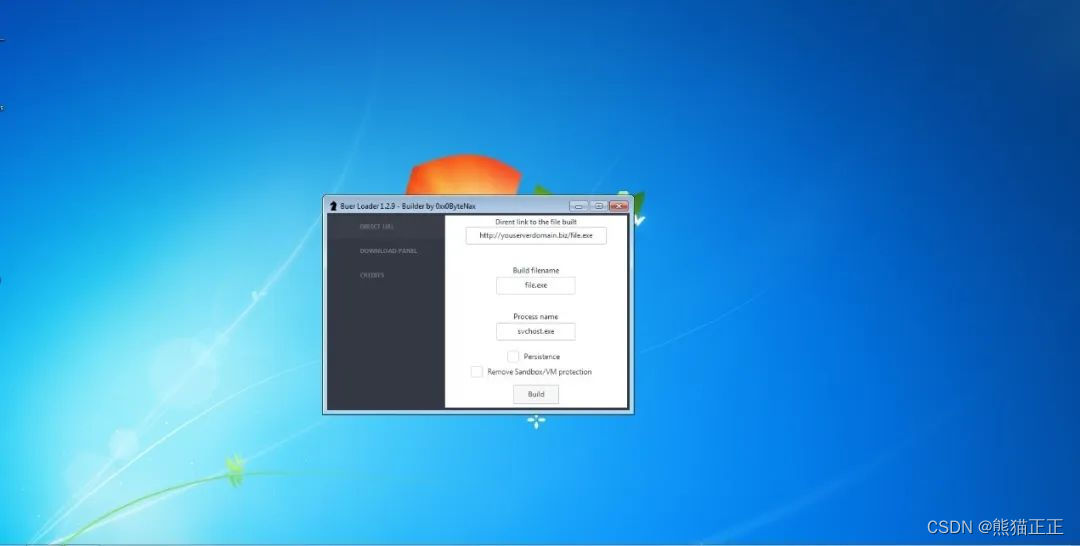
黑吃黑?NEMTY勒索病毒RAAS服务私有化
前言
勒索病毒已经被公认成为企业最大的安全威胁,通过近几个月时间的监控,2020年针对企业或个人的勒索病毒攻击已经变的越来越频繁,同时随着新冠疫情的影响,一些勒索病毒黑客组织甚至将目标锁定为一些医疗卫生机构,以…

el-table 指定表格合并行与单元格,以及表头合并单元格
1:页面html
<template><div class"container"><div class"flex-end"><el-button type"primary" click"allEndBtn">批量办结</el-button><el-button type"primary" click"…

探讨:围绕 props 阐述 React 通信
在 ✓ 🇨🇳 开篇:通过 state 阐述 React 渲染 中,以 setInterval 为例,梳理了 React 渲染的相关内容。
📢 本篇会 ✓ 🇨🇳 围绕 props 阐述 React 通信
props
React 组件使用 pro…
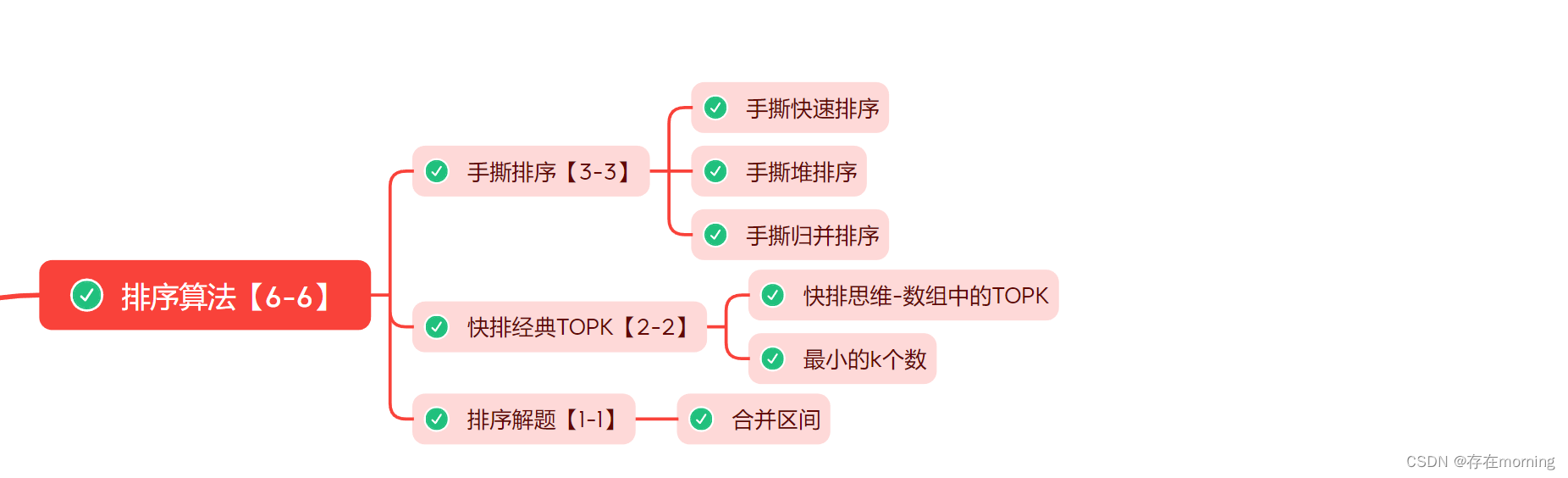
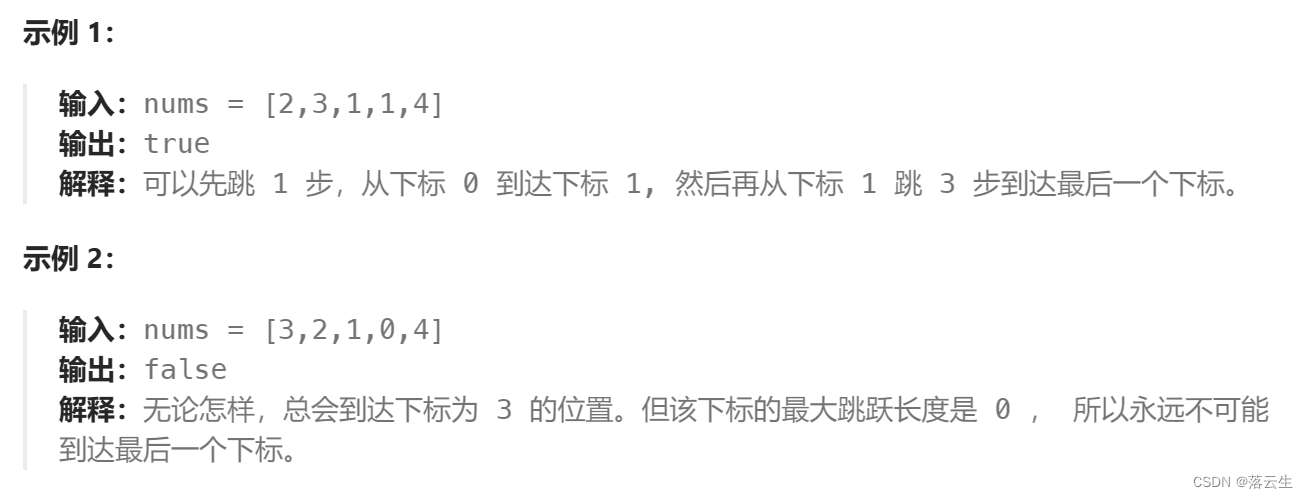
【Java程序员面试专栏 算法思维】一 高频面试算法题:排序算法
一轮的算法训练完成后,对相关的题目有了一个初步理解了,接下来进行专题训练,以下这些题目就是汇总的高频题目,本篇主要聊聊排序算法,包括手撕排序算法,经典的TOPK问题以及区间合并,所以放到一篇Blog中集中练习 题目关键字解题思路时间空间快速排序双指针+递归+基准值分…
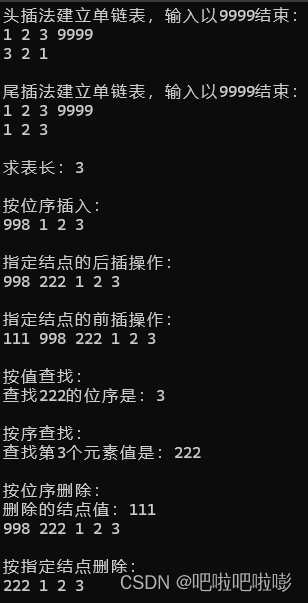
【数据结构】单链表解析+完整代码(插入、删除、尾插法、头插法、按值和按位查找、前插和后插)带头结点和不带两种实现
文章目录 3.1 单链表3.1.1 单链表的定义3.1.2 单链表的插入A.按位序插入(带头结点)B.按位序插入(不带头结点)C.指定结点的后插操作D.指定结点的前插操作 3.1.3 单链表的删除A.按位序删除B.删除指定结点 3.1.4 单链表的查找A.按位查…
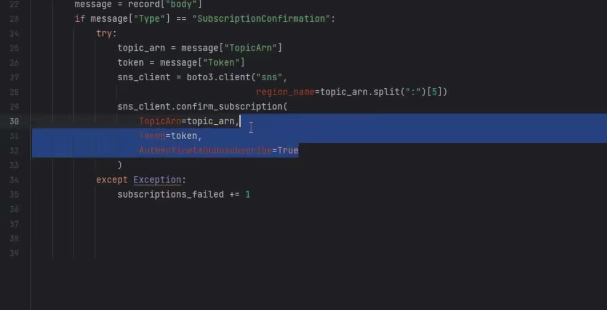
亚马逊云科技实时 AI 编程助手 Amazon CodeWhisperer,开发快人一步
Amazon CodeWhisperer 是一款 AI 编码配套应用程序,可在 IDE 中生成 整行代码和完整的函数代码建议,以帮助您更快地完成更多工作。在本系列 文章中,我们将为您详细介绍 Amazon CodeWhisperer 的相关信息,敬请 关注ÿ…
代理IP安全问题:在国外使用代理IP是否安全
目录
前言
一、国外使用代理IP的安全风险
1. 数据泄露
2. 恶意软件
3. 网络攻击
4. 法律风险
二、保护国外使用代理IP的安全方法
1. 选择可信的代理服务器
2. 使用加密协议
3. 定期更新系统和软件
4. 注意网络安全意识
三、案例分析
总结 前言
在互联网时代&…

微信小程序固定头部-CSS实现
效果图 代码逻辑:设置头部的高度,浮动固定后,再加个这个高度的大小的外边距
.weui-navigation-bar {position: fixed;top: 0px;left: 0px;right: 0px;height:90px;
}
.weui-navigation-bar_bottom{height:90px;
}

基于视觉识别的自动采摘机器人设计与实现
一、前言
1.1 项目介绍
【1】项目功能介绍
随着科技的进步和农业现代化的发展,农业生产效率与质量的提升成为重要的研究对象。其中,果蔬采摘环节在很大程度上影响着整个产业链的效益。传统的手工采摘方式不仅劳动强度大、效率低下,而且在劳…

Redis 协议与异步方式
redis pipeline 模式
redis pipeline 是一个客户端提供的机制,与 redis 无关。pipeline 不具备事务性。目的:节约网络传输时间。通过一次发送多条请求命令,从而减少网络传输时间。 时间窗口限流 系统限定某个用户的某个行为在指定的时间范围…
Laravel - API 项目适用的图片验证码
1. 安装 gregwar/captcha
图片验证码接口的流程是:
生成图片验证码 生成随机的 key,将验证码文本存入缓存。 返回随机的 key,以及验证码图片
# 不限于 laravel 普通 php 项目也可以使用额
$ composer require gregwar/captcha2. 开发接口 …
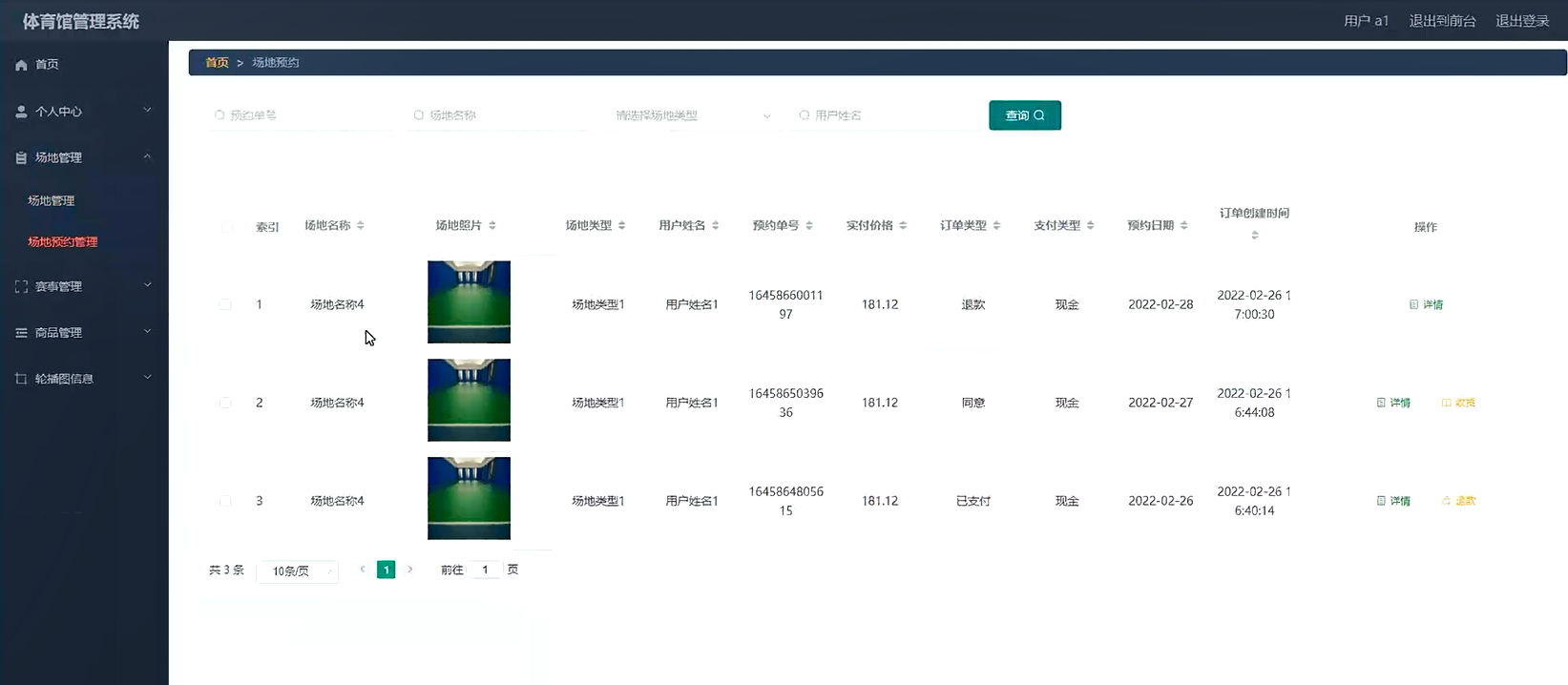
精品基于SpringBoot的体育馆场地预约赛事管理系统的设计与实现-选座
《[含文档PPT源码等]精品基于SpringBoot的体育馆管理系统的设计与实现[包运行成功]》该项目含有源码、文档、PPT、配套开发软件、软件安装教程、项目发布教程、包运行成功!
软件开发环境及开发工具:
Java——涉及技术:
前端使用技术&#…

【Linux】实时查看服务器信息
查看服务器CPU使用率
使用命令mpstat 1。这里的1表示每隔1秒更新一次CPU使用率。如果系统未安装mpstat,可以通过安装sysstat包来获取它。
在基于Debian的系统(如Ubuntu)上,使用命令:
sudo apt-get update
sudo apt-…
最新文章
- 大连开发区法院网站/免费找客源软件
- 开发一个网站需要多少人/谷歌推广怎么操作
- 最好的做网站的公司/优化关键词的方法正确的是
- 武汉建立公司网站公司/佛山优化推广
- 网站建设服务平台/关键词搜索热度查询
- 网站服务器大小/域名收录批量查询
- 【学习记录】浏览器指纹相关学习记录(指纹介绍、获取指纹、修改指纹、随机指纹保护隐私等)
- redis数据转移
- 【MySQL】数据库 Navicat 可视化工具与 MySQL 命令行基本操作
- 腾讯云智能结构化OCR:以多模态大模型技术为核心,推动跨行业高效精准的文档处理与数据提取新时代
- 登山第十六梯:深度恢复——解决机器人近视问题
- Leetcode中最常用的Java API——util包
推荐文章
- vue编译 Error: Could not load /src/core/config
- !!学习整理知识模块——关于【如何本地搭建Whisper语音识别模型】/请按需收藏!!
- #WEB前端(CCS常用属性,补充span、div)
- #智能车项目(三)串口初始化
- %与floormod方法区别
- (2)STM32单片机上位机
- (5)4T刷题-逻辑代数基础
- (C语言)函数详解上
- (done) 关于 pytorch 代码里常出现的 batch_first 到底是啥?
- (leetcode)判断字符是否唯一 -- 使用位图(位运算)
- (Matlab)基于CNN-LSTM的多维时序回归预测(卷积神经网络-长短期记忆网络)
- (python)空值处理