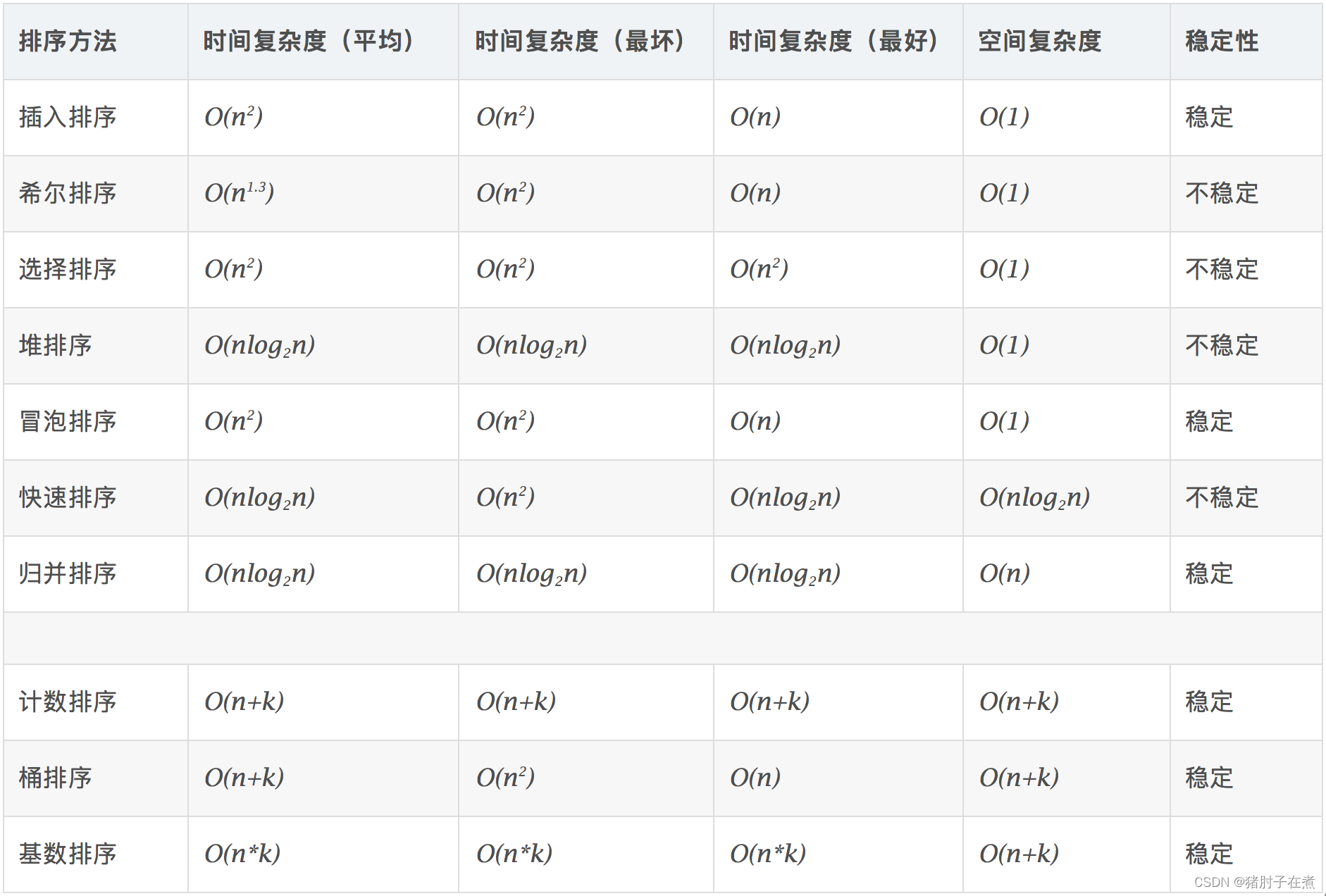
排序算法总结
直接插入排序
取出未排序部分的第一个元素,与已排序的部分从后往前比较,找到合适的位置。将大于它的已排序的元素向后移动,将该元素插入到合适的位置。
//1. 直接插入排序
void InsertionSort(vector<int>& nums){for(int i=1;i<nums.size();i++){int key = nums[i];//取出未排序部分的第一个元素int j =i-1;// 将这个元素与已排序部分的元素从后向前比较,找到合适的位置插入while(j>=0 && nums[j]>key){nums[j+1]=nums[j];// 已排序的元素向后移动j--;}nums[j+1]=key; // 插入到正确位置}
}
希尔排序
希尔排序是一种基于插入排序的算法,通过引入间隔序列来允许交换距离较远的元素,从而对数组进行部分排序,这个过程重复进行,每次都减小间隔,直到整个数组被排序。
//2. 希尔排序,分组后组内进行直接插入排序
void shellSort(vector<int>& nums){int n = nums.size();//gap最初为n/2,然后不断减小直至为1for(int gap = n/2; gap>0 ;gap/=2){for(int i = gap ;i < n; i += 1){//获取未排序的第一个元素int key = nums[i];int j=i-gap;//前一个元素是i-gap;while(j>=0 && nums[j]>key){nums[j+gap]=nums[j];j-=gap;}nums[j+gap]=key;}}
}
冒泡排序
冒泡排序的核心思想是通过重复遍历要排序的列表,比较每对相邻的项,然后交换它们(如果它们是在错误的顺序)。这个过程重复进行,直到没有需要交换的项,这意味着列表已经排序完成。每完成一轮遍历,至少一个元素会被移动到其最终位置。
//3. 冒泡排序
void bubbleSort(vector<int>& nums){int n = nums.size();for(int i=0;i<n-1;i++){ bool flag = false;for(int j=0;j<n-i-1;j++){if(nums[j]>nums[j+1])swap(nums[j],nums[j+1]);flag = true;}if(flag==false) return; //如果这一趟没有发生任何交换,则意味已经有序。}
}
快速排序
快速排序是一种高效的排序算法,采用分治法的思想来对数组进行排序。它的基本步骤是选择一个元素作为基准(pivot),重新排列数组,所有比基准值小的元素摆放在基准前面,所有比基准值大的元素摆在基准的后面(相等的数可以到任一边)。在这个分区退出之后,该基准就处于数组的中间位置。这个过程称为分区(partition)操作。然后,递归地(recursive)把小于基准值元素的子数组和大于基准值元素的子数组排序。
//4. 快速排序
int partition(vector<int>& nums,int low, int high)
{int pivot=nums[low];int i=low;int j=high;while(i<j){// 从右向左找到第一个小于等于pivot的数 while(i<j && nums[j]>pivot){j--;}if(i<j){nums[i]=nums[j];i++;}// 从左向右找到第一个大于pivot的数while(i<j && nums[i]<pivot){i++;}if(i<j){nums[j]=nums[i];j--;}}nums[i]=pivot;// 将基准值放到正确的位置return i; // 返回基准值的位置
}void quickSort(vector<int>& nums, int low, int high){if(low<high){// pi是partitioning index,arr[pi]现在在正确的位置int pi = partition(nums,low,high);// 分区操作,并返回基准值的索引quickSort(nums,low,pi-1);//对左子树进行快速排序quickSort(nums,pi+1,high);//对右子树进行快速排序}}简单选择排序
简单选择排序是一种直观且基础的排序算法。它的工作原理是:遍历数组,每次从未排序的部分选出最小(或最大)的元素,放到已排序部分的末尾。这个过程重复进行,直到整个数组排序完成。简单选择排序的时间复杂度为O(n^2),在任何情况下都是这样,这使得它在处理大数据集时不够高效。然而,由于其实现简单,它在数据量不大时仍然是一个不错的选择。
// 5. 简单选择排序:找到最小的元素后,和第一个元素交换
void simpleSort(vector<int>& nums)
{for(int i=0;i<nums.size();i++){// 寻找[i, n)区间里的最小值的索引int minindex=i;for(int j=0;i<nums.size();j++){if(nums[j]<nums[minindex]){minindex=j;}}swap(nums[i],nums[minindex]);}
}
堆排序
小根堆的时候是降序排列,大根堆是升序排列。
// 调整根堆,i是要调整的节点索引,n是堆的大小
void heapify(vector<int>& nums, int n, int i) {int smallest = i; // 初始化最小元素为当前节点int left = 2 * i + 1; // 左子节点int right = 2 * i + 2; // 右子节点// 如果左子节点更小,则更新最小元素的索引if (left < n && nums[left] < nums[smallest]) {smallest = left;}// 如果右子节点更小,则更新最小元素的索引if (right < n && nums[right] < nums[smallest]) {smallest = right;}// 如果最小元素不是当前节点,交换它们,并对交换后的节点进行调整if (smallest != i) {swap(nums[i], nums[smallest]);heapify(nums, n, smallest);}
}// 堆排序
void heapSort(vector<int>& nums) {int n = nums.size();//构建小根堆(从最后一个非叶子节点往上,最后一个非叶子节点是n/2-1)for(int i = n/2-1;i>=0;i--){heapify(nums,n,i);}//一个个从小根堆中取出,然后调整堆for(int i=n-1;i>0;i--){swap(nums[0],nums[i]);heapify(nums,i,0);}
}归并排序
// 7. 归并排序
// 归并两个子数组的函数
// 第一个子数组是 arr[l..m]
// 第二个子数组是 arr[m+1..r]
// 归并排序是一种高效的排序算法,采用分治法的一个应用。
// 它将数组分成两半,对每部分递归地应用归并排序,
// 然后将两部分合并成一个有序数组。
// 这个过程包括分解数组成为越来越小的部分,
// 直至每个小部分只有一个元素,然后开始合并这些小部分,
// 使之有序,最终得到完全排序的数组。
void merge(vector<int>& nums,int l,int m,int r){int i,j,k;int n1=m-l+1;//左边的大小int n2=r-m;//右边的大小// 创建临时数组vector<int> L(n1),R(n2);// 拷贝数据到临时数组L Rfor(int i=0;i<n1;i++)L[i]=nums[l+i];for (j = 0; j < n2; j++)R[j] = nums[m + 1 + j];//归并临时数组到nums[l-r]i=0;j=0;k=l;while(i<n1 && j<n2){if (L[i] <= R[j]) {nums[k] = L[i];i++;} else {nums[k] = R[j];j++;}k++;}// 拷贝 L[] 的剩余元素while (i < n1) {nums[k] = L[i];i++;k++;}// 拷贝 R[] 的剩余元素while (j < n2) {nums[k] = R[j];j++;k++;}}
void mergeSort(vector<int>& nums, int l, int r)
{ if(l<r){int m=l+(r-l)/2;//分别对左右办部分进行排序mergeSort(nums,l,m);mergeSort(nums,m+1,r);//合并这两个部分merge(nums,l,m,r);}}reference
https://leetcode.cn/circle/discuss/rzsN73/ 排序算法大汇总
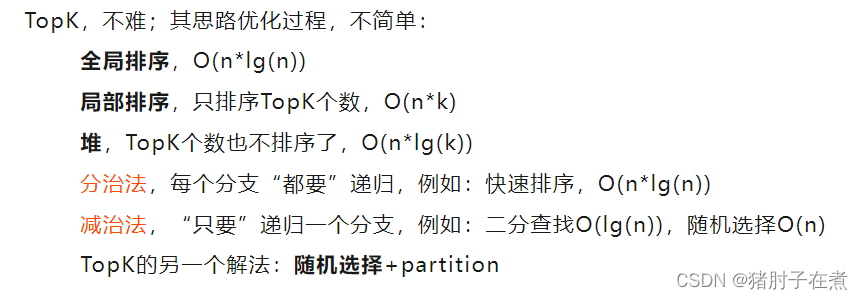
https://mp.weixin.qq.com/s/FFsvWXiaZK96PtUg-mmtEw TOPk问题大汇总