目录
- 9.4 实现注意:展开参数
- 9.5 梯度检验
- 9.6 随机初始化
- 9.7 综合起来
- 9.8 自主驾驶
9.4 实现注意:展开参数
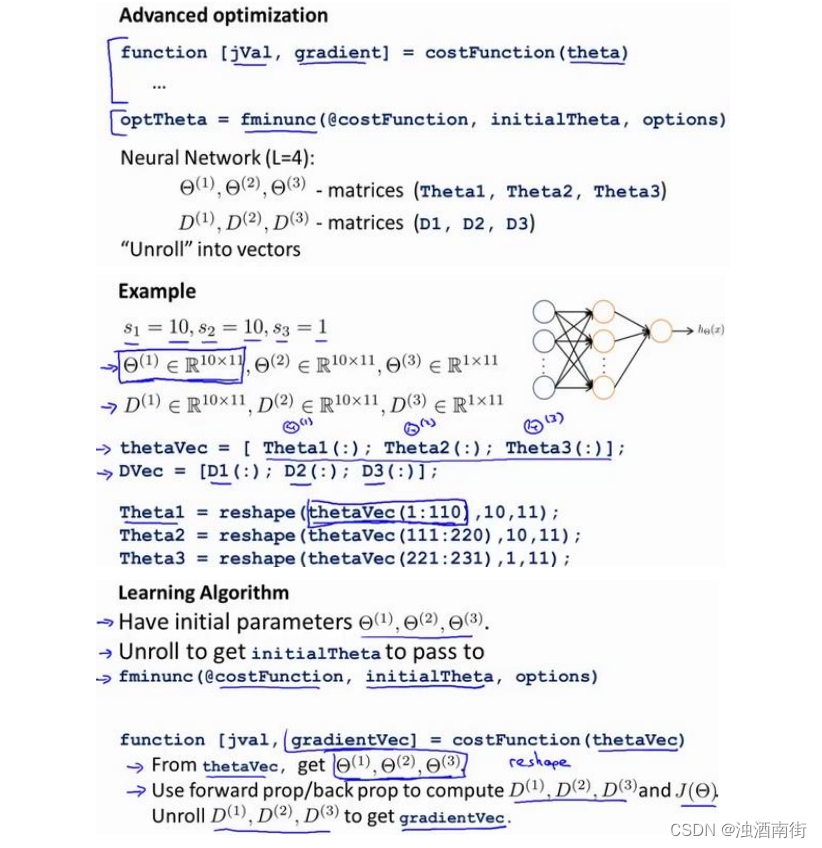
在上一段视频中,我们谈到了怎样使用反向传播算法计算代价函数的导数。在这段视频中,我想快速地向你介绍一个细节的实现过程,怎样把你的参数从矩阵展开成向量,以便我们在高级最优化步骤中的使用需要。
9.5 梯度检验
当我们对一个较为复杂的模型(例如神经网络)使用梯度下降算法时,可能会存在一些不容易察觉的错误,意味着,虽然代价看上去在不断减小,但最终的结果可能并不是最优解。
为了避免这样的问题,我们采取一种叫做梯度的数值检验(Numerical Gradient Checking)方法。这种方法的思想是通过估计梯度值来检验我们计算的导数值是否真的是我们要求的。
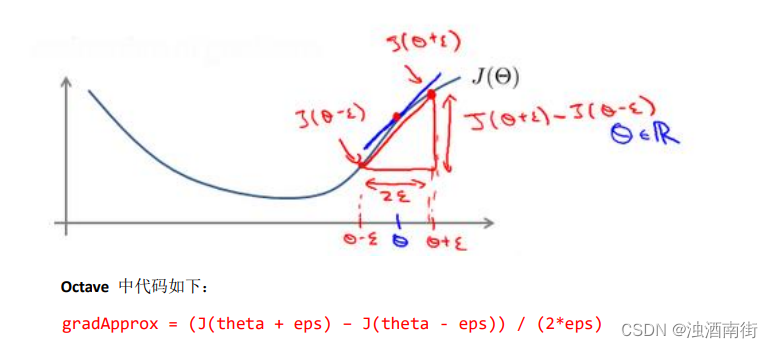
对梯度的估计采用的方法是在代价函数上沿着切线的方向选择离两个非常近的点然后计算两个点的平均值用以估计梯度。即对于某个特定的 𝜃,我们计算出在 𝜃-𝜀 处和 𝜃+𝜀 的代价值(𝜀是一个非常小的值,通常选取 0.001),然后求两个代价的平均,用以估计在 𝜃处的代价值。
当𝜃是一个向量时,我们则需要对偏导数进行检验。因为代价函数的偏导数检验只针对一个参数的改变进行检验,下面是一个只针对𝜃1进行检验的示例:

最后我们还需要对通过反向传播方法计算出的偏导数进行检验。
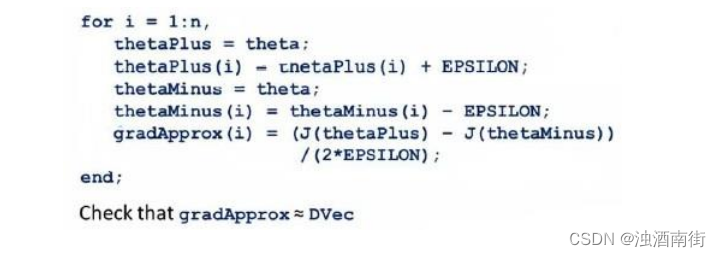
根据上面的算法,计算出的偏导数存储在矩阵 D i j ( l ) D_{ij}^{(l)} Dij(l) 中。检验时,我们要将该矩阵展开成为向量,同时我们也将 𝜃 矩阵展开为向量,我们针对每一个 𝜃 都计算一个近似的梯度值,将这些值存储于一个近似梯度矩阵中,最终将得出的这个矩阵同 D i j ( l ) D_{ij}^{(l)} Dij(l) 进行比较。
9.6 随机初始化
任何优化算法都需要一些初始的参数。到目前为止我们都是初始所有参数为 0,这样的初始方法对于逻辑回归来说是可行的,但是对于神经网络来说是不可行的。如果我们令所有的初始参数都为 0,这将意味着我们第二层的所有激活单元都会有相同的值。同理,如果我们初始所有的参数都为一个非 0 的数,结果也是一样的。
我们通常初始参数为正负𝜀之间的随机值,假设我们要随机初始一个尺寸为 10×11 的参数矩阵,代码如下:
Theta1 = rand(10, 11) * (2*eps) – eps
9.7 综合起来
小结一下使用神经网络时的步骤:
网络结构:第一件要做的事是选择网络结构,即决定选择多少层以及决定每层分别有多少个单元。
第一层的单元数即我们训练集的特征数量。
最后一层的单元数是我们训练集的结果的类的数量。
如果隐藏层数大于 1,确保每个隐藏层的单元个数相同,通常情况下隐藏层单元的个数越多越好。
我们真正要决定的是隐藏层的层数和每个中间层的单元数。
训练神经网络:
- 参数的随机初始化
- 利用正向传播方法计算所有的ℎ𝜃(𝑥)
- 编写计算代价函数 𝐽 的代码
- 利用反向传播方法计算所有偏导数
- 利用数值检验方法检验这些偏导数
- 使用优化算法来最小化代价函数
9.8 自主驾驶
在这段视频中,我想向你介绍一个具有历史意义的神经网络学习的重要例子。那就是使用神经网络来实现自动驾驶,也就是说使汽车通过学习来自己驾驶。接下来我将演示的这段视频是我从 Dean Pomerleau 那里拿到的,他是我的同事,任职于美国东海岸的卡耐基梅隆大学。在这部分视频中,你就会明白可视化技术到底是什么?在看这段视频之前,我会告诉你可视化技术是什么。
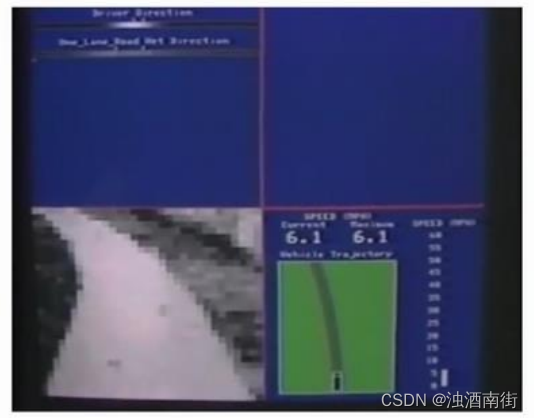
在下面也就是左下方,就是汽车所看到的前方的路况图像。

在图中你依稀能看出一条道路,朝左延伸了一点,又向右了一点,然后上面的这幅图,你可以看到一条水平的菜单栏显示的是驾驶操作人选择的方向。就是这里的这条白亮的区段显示的就是人类驾驶者选择的方向。比如:最左边的区段,对应的操作就是向左急转,而最右端则对应向右急转的操作。因此,稍微靠左的区段,也就是中心稍微向左一点的位置,则表示在这一点上人类驾驶者的操作是慢慢的向左拐。
这幅图的第二部分对应的就是学习算法选出的行驶方向。并且,类似的,这一条白亮的区段显示的就是神经网络在这里选择的行驶方向,是稍微的左转,并且实际上在神经网络开始学习之前,你会看到网络的输出是一条灰色的区段,就像这样的一条灰色区段覆盖着整个区域这些均称的灰色区域,显示出神经网络已经随机初始化了,并且初始化时,我们并不知道汽车如何行驶,或者说我们并不知道所选行驶方向。只有在学习算法运行了足够长的时间之后,才会有这条白色的区段出现在整条灰色区域之中。显示出一个具体的行驶方向这就表示神经网络算法,在这时候已经选出了一个明确的行驶方向,不像刚开始的时候,输出一段模糊的浅灰色区域,而是输出一条白亮的区段,表示已经选出了明确的行驶方向。

ALVINN (Autonomous Land Vehicle In a Neural Network)是一个基于神经网络的智能系统,通过观察人类的驾驶来学习驾驶,ALVINN 能够控制 NavLab,装在一辆改装版军用悍马,这辆悍马装载了传感器、计算机和驱动器用来进行自动驾驶的导航试验。实现 ALVINN 功能的第一步,是对它进行训练,也就是训练一个人驾驶汽车。

然后让 ALVINN 观看,ALVINN 每两秒将前方的路况图生成一张数字化图片,并且记录驾驶者的驾驶方向,得到的训练集图片被压缩为 30x32 像素,并且作为输入提供给 ALVINN 的三层神经网络,通过使用反向传播学习算法,ALVINN 会训练得到一个与人类驾驶员操纵方
向基本相近的结果。一开始,我们的网络选择出的方向是随机的,大约经过两分钟的训练后,我们的神经网络便能够准确地模拟人类驾驶者的驾驶方向,对其他道路类型,也重复进行这个训练过程,当网络被训练完成后,操作者就可按下运行按钮,车辆便开始行驶了。
每秒钟 ALVINN 生成 12 次数字化图片,并且将图像传送给神经网络进行训练,多个神经网络同时工作,每一个网络都生成一个行驶方向,以及一个预测自信度的参数,预测自信度最高的那个神经网络得到的行驶方向。比如这里,在这条单行道上训练出的网络将被最终用于控制车辆方向,车辆前方突然出现了一个交叉十字路口,当车辆到达这个十字路口时,我们单行道网络对应的自信度骤减,当它穿过这个十字路口时,前方的双车道将进入其视线,双车道网络的自信度便开始上升,当它的自信度上升时,双车道的网络,将被选择来控制行驶方向,车辆将被安全地引导进入双车道路。
这就是基于神经网络的自动驾驶技术。当然,我们还有很多更加先进的试验来实现自动驾驶技术。在美国,欧洲等一些国家和地区,他们提供了一些比这个方法更加稳定的驾驶控制技术。但我认为,使用这样一个简单的基于反向传播的神经网络,训练出如此强大的自动驾驶汽车,的确是一次令人惊讶的成就。

![BUUCTF------[HCTF 2018]WarmUp](https://img-blog.csdnimg.cn/direct/91f9012498db4f7e977d01db2e669644.png)