1、Get Started
1.1、MDP环境下训练强化学习智能体
MDP环境如下图
- 每个圆圈代表一个状态
- 每个状态都有上或下的选择
- 智能体从状态 1 开始
- 智能体接收的奖励值为图中状态转移的值
- 训练目标是最大化累计奖励
(1)创建 MDP 环境
创建一个具有 8 个状态和 2 个动作( " up " 和 " down " )的MDP模型。
MDP = createMDP(8,["up";"down"]);
要对上图中状态转换进行建模,需修改 MDP 的状态转换矩阵和奖励矩阵。默认情况下,这些矩阵均为零。有关创建 MDP 模型和 MDP 对象属性的更多信息,请参见 createMDP 。
修改 MDP 的状态转换和奖励矩阵,例如,在以下命令中:
- 前两行指定了通过执行动作 1( " up " )从状态 1 到状态 2 的转移,以及此转移对应的奖励 +3
- 接下来的两行指定了通过执行操作2( " down " )从状态 1 到状态 3 的转移,以及此转移对应的奖励 +1
MDP.T(1,2,1) = 1;
MDP.R(1,2,1) = 3;
MDP.T(1,3,2) = 1;
MDP.R(1,3,2) = 1;
同理,指定图中其余的状态转移和对应奖励。
% State 2 transition and reward
MDP.T(2,4,1) = 1;
MDP.R(2,4,1) = 2;
MDP.T(2,5,2) = 1;
MDP.R(2,5,2) = 1;
% State 3 transition and reward
MDP.T(3,5,1) = 1;
MDP.R(3,5,1) = 2;
MDP.T(3,6,2) = 1;
MDP.R(3,6,2) = 4;
% State 4 transition and reward
MDP.T(4,7,1) = 1;
MDP.R(4,7,1) = 3;
MDP.T(4,8,2) = 1;
MDP.R(4,8,2) = 2;
% State 5 transition and reward
MDP.T(5,7,1) = 1;
MDP.R(5,7,1) = 1;
MDP.T(5,8,2) = 1;
MDP.R(5,8,2) = 9;
% State 6 transition and reward
MDP.T(6,7,1) = 1;
MDP.R(6,7,1) = 5;
MDP.T(6,8,2) = 1;
MDP.R(6,8,2) = 1;
% State 7 transition and reward
MDP.T(7,7,1) = 1;
MDP.R(7,7,1) = 0;
MDP.T(7,7,2) = 1;
MDP.R(7,7,2) = 0;
% State 8 transition and reward
MDP.T(8,8,1) = 1;
MDP.R(8,8,1) = 0;
MDP.T(8,8,2) = 1;
MDP.R(8,8,2) = 0;
指定状态 7 和状态 8 为 MDP 的终端状态。
MDP.TerminalStates = ["s7";"s8"];
创建强化学习 MDP 环境。
env = rlMDPEnv(MDP);
通过重置函数指定环境的初始状态始终为状态 1,该函数在每次训练或模拟开始时调用。创建一个匿名函数句柄,将初始状态设置为 1。
env.ResetFcn = @() 1;
设置随机数种子。
rng(0)
(2) 创建 Q-Learning 智能体
首先使用 MDP 环境中的观察和动作创建 Q table,将学习率设置为1。
obsInfo = getObservationInfo(env);
actInfo = getActionInfo(env);
qTable = rlTable(obsInfo, actInfo);
qFunction = rlQValueFunction(qTable, obsInfo, actInfo);
qOptions = rlOptimizerOptions(LearnRate=1);
然后使用 Q table 创建一个 Q-learning 智能体,遵循 ϵ \epsilon ϵ-贪婪策略。有关创建 Q-learning 智能体的更多信息,请参阅 rlQAgent 和 rlQAgentOptions 。
agentOpts = rlQAgentOptions;
agentOpts.DiscountFactor = 1;
agentOpts.EpsilonGreedyExploration.Epsilon = 0.9;
agentOpts.EpsilonGreedyExploration.EpsilonDecay = 0.01;
agentOpts.CriticOptimizerOptions = qOptions;
qAgent = rlQAgent(qFunction,agentOpts); %#ok<NASGU>
(3)训练 Q-Learning 智能体
训练智能体首先需要指定训练选项。对于此示例,使用以下选项:
- 最多训练 500 回合,每回合最多持续 50 个时间步长
- 当智能体在连续 30 回合内的平均累积奖励 >10,停止训练
更多信息请参见 rlTrainingOptions 。
trainOpts = rlTrainingOptions;
trainOpts.MaxStepsPerEpisode = 50;
trainOpts.MaxEpisodes = 500;
trainOpts.StopTrainingCriteria = "AverageReward";
trainOpts.StopTrainingValue = 13;
trainOpts.ScoreAveragingWindowLength = 30;
使用函数 Train 训练智能体,大该需要几分钟完成。为了节省时间,可以通过将 doTraining 设置为 false 来加载预训练的智能体。若要自己训练智能体,将 doTraining 设置为 true 。
doTraining = false;if doTraining% Train the agent.trainingStats = train(qAgent,env,trainOpts); %#ok<UNRCH>
else% Load pretrained agent for the example.load("genericMDPQAgent.mat","qAgent");
end
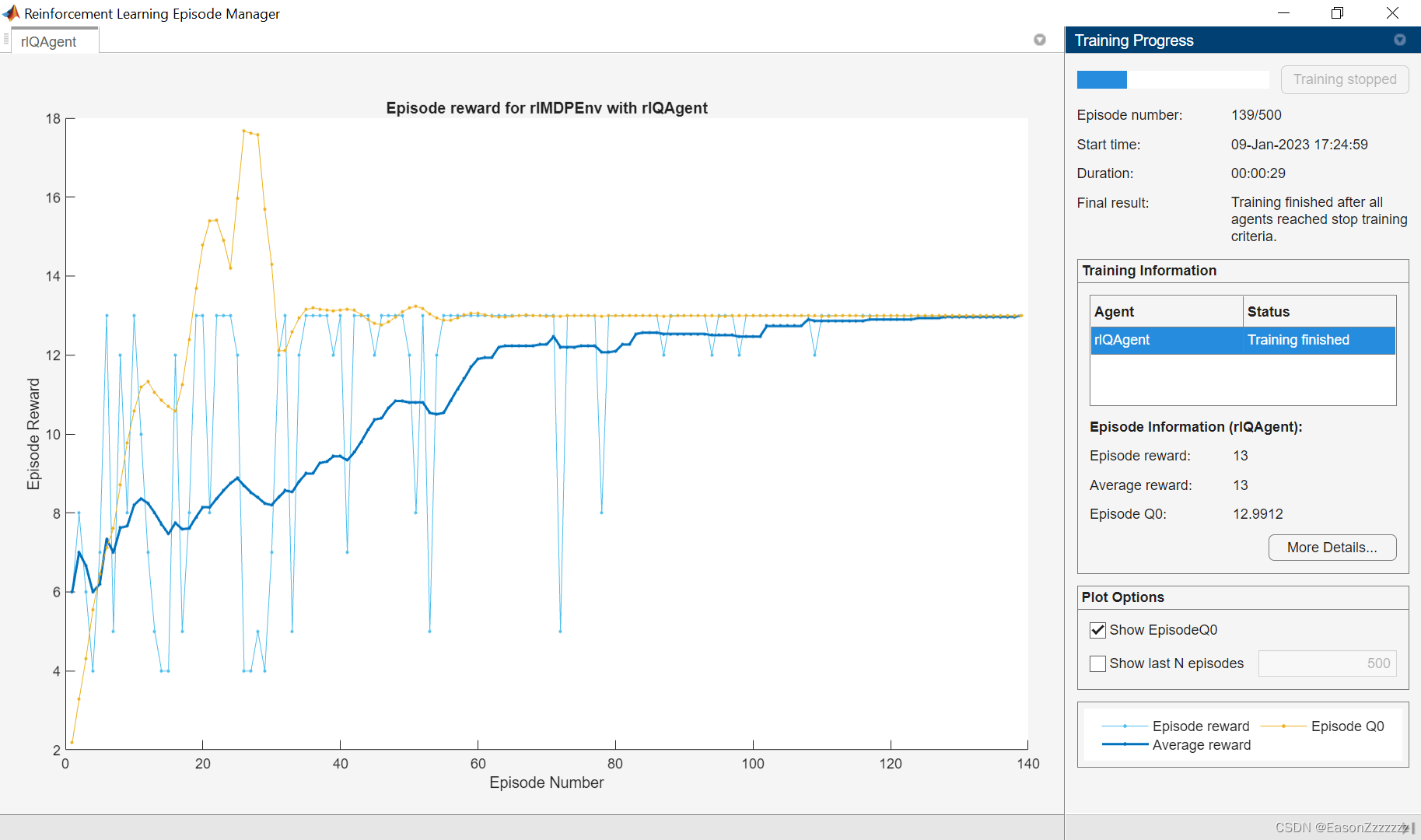
(4)验证 Q-Learning 结果
为了验证训练结果,使用函数 sim 在 MDP 环境中模拟智能体。智能体成功地找到了最佳路径,并获得了 13 的累积奖励。
Data = sim(qAgent,env);
cumulativeReward = sum(Data.Reward)==> cumulativeReward = 13
由于折扣系数设置为 1,因此经过训练的智能体的 Q table 中的值即真实的回报。
QTable = getLearnableParameters(getCritic(qAgent));
QTable{1}==> ans = 8x2 single matrix12.9912 11.66218.2141 9.995010.8645 4.04144.8017 -1.61505.1975 8.99755.8058 -0.23530 00 0
TrueTableValues = [13,12;5,10;11,9;3,2;1,9;5,1;0,0;0,0]
==> TrueTableValues = 8×213 125 1011 93 21 95 10 00 0
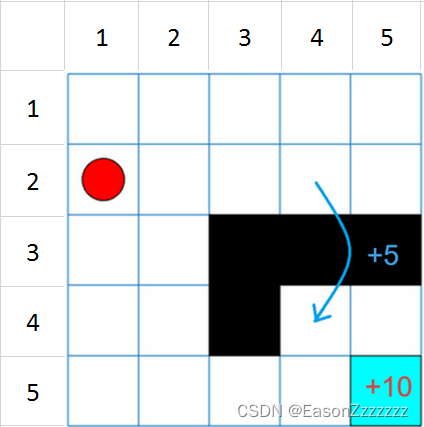
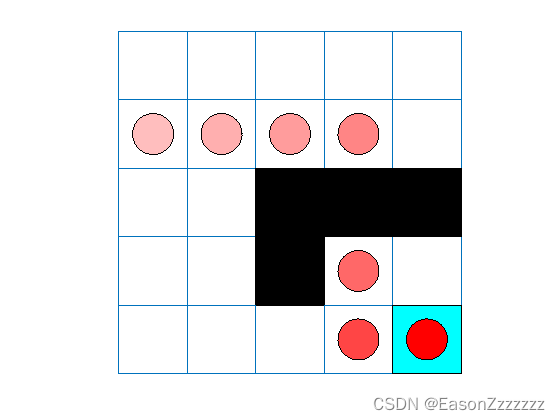
1.2、在网格世界中训练智能体(Q-learning 和 SARSA)
网格世界描述如下:
- 网格世界大小为 5 × 5 5\times5 5×5,有四个可能的动作(North=1,South=2,East=3,West=4)
- 智能体从网格(2,1)出发
- 如果智能体到达网格(5,5),则它将获得奖励 10
- 网格世界中包含从网格(2,4)到网格(4,4)的跳跃,奖励为 5
- 智能体会被障碍物(黑色网格区域)阻挡
- 所有其他动作将获得奖励 -1
(1)创建网格世界环境
env = rlPredefinedEnv("BasicGridWorld");
通过创建一个充值函数来指定智能体的初始状态始终为 [ 2 , 1 ] [2,1] [2,1],该函数在每次训练和模拟开始调用。
从位置[1,1]开始对状态进行编号。状态编号随着您向下移动第一列,然后向下移动后续每一列而增加。因此,创建一个匿名函数句柄,将初始状态设置为2。
固定随机数种子
rng(0)
(2)创建 Q-Learning 智能体
首先创建 Q table,然后将学习率设置为1。
qTable = rlTable(getObservationInfo(env),getActionInfo(env));
qRepresentation = rlQValueRepresentation(qTable,getObservationInfo(env),getActionInfo(env));
qRepresentation.Options.LearnRate = 1;
接下来,使用 Q-table 创建 Q-learning 智能体,并设定 ϵ \epsilon ϵ-贪婪策略。更多信息请参见 rlQAgent 和 rlQAgentOptions。
agentOpts = rlQAgentOptions;
agentOpts.EpsilonGreedyExploration.Epsilon = .04;
qAgent = rlQAgent(qRepresentation,agentOpts);
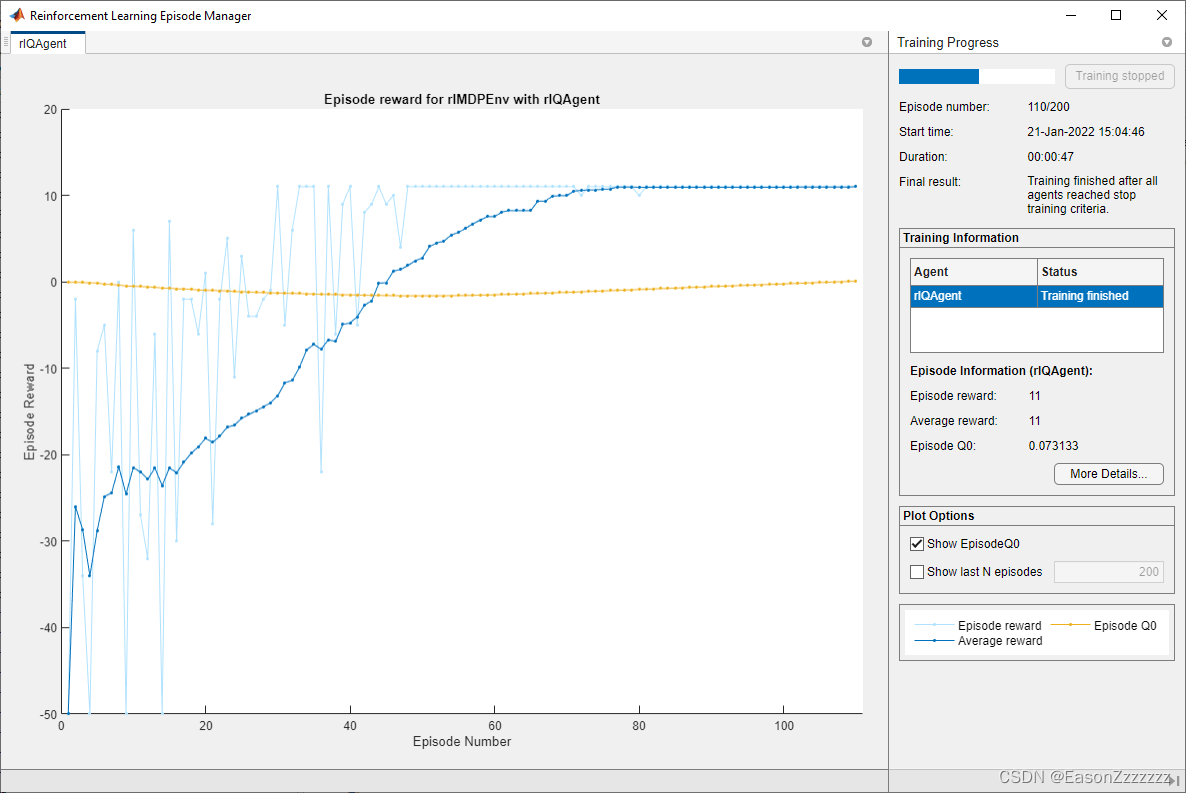
(3)训练 Q-Learning 智能体
指定以下训练选项:
- 最多训练 200 回合,每个回合最多持续 50 个时间步长
- 当智能体连续 20 回合平均累计奖励 >10 时,停止训练
更多的信息请参见 rlTrainingOptions
trainOpts = rlTrainingOptions;
trainOpts.MaxStepsPerEpisode = 50;
trainOpts.MaxEpisodes= 200;
trainOpts.StopTrainingCriteria = "AverageReward";
trainOpts.StopTrainingValue = 11;
trainOpts.ScoreAveragingWindowLength = 30;
使用函数 Train 来训练 Q-learning 智能体,训练可能需要几分钟才能完成。
为了在运行此示例时节省时间,可以将 doTraining 设置为 false 来加载预训练的智能体。若要自己训练智能体,可以将 doTraining 设置为 true 。
doTraining = false;if doTraining% Train the agent.trainingStats = train(qAgent,env,trainOpts);
else% Load the pretrained agent for the example.load('basicGWQAgent.mat','qAgent')
end
回合管理器窗口打开并显示训练进度。
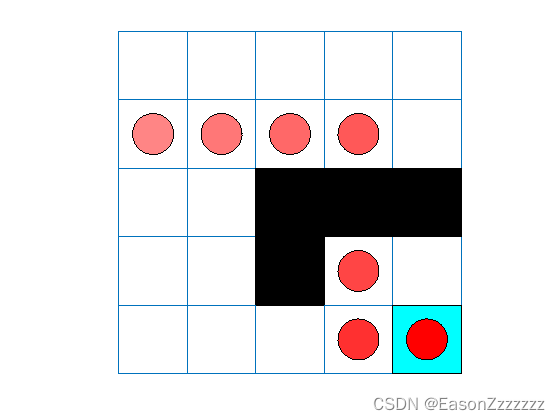
(4)验证 Q-Learning 结果
plot(env)
env.Model.Viewer.ShowTrace = true;
env.Model.Viewer.clearTrace;
使用函数 sim 模拟环境中的智能体。
sim(qAgent,env)
(5)创建和训练 SARSA 智能体
使用与 Q-learning 智能体相同的 Q table 和 ϵ \epsilon ϵ-贪婪策略。更多信息请参见 rlSARSAAgent 和 rlSARSAAgentOptions
agentOpts = rlSARSAAgentOptions;
agentOpts.EpsilonGreedyExploration.Epsilon = 0.04;
sarsaAgent = rlSARSAAgent(qRepresentation,agentOpts);
使用函数 Train 训练 SARSA 智能体,训练可能需要几分钟才能完成。
为了在运行此示例时节省时间,可以将 doTraining 设置为 false 来加载预训练的智能体。若要自己训练智能体,可以将 doTraining 设置为 true 。
doTraining = false;if doTraining% Train the agent.trainingStats = train(sarsaAgent,env,trainOpts);
else% Load the pretrained agent for the example.load('basicGWSarsaAgent.mat','sarsaAgent')
end
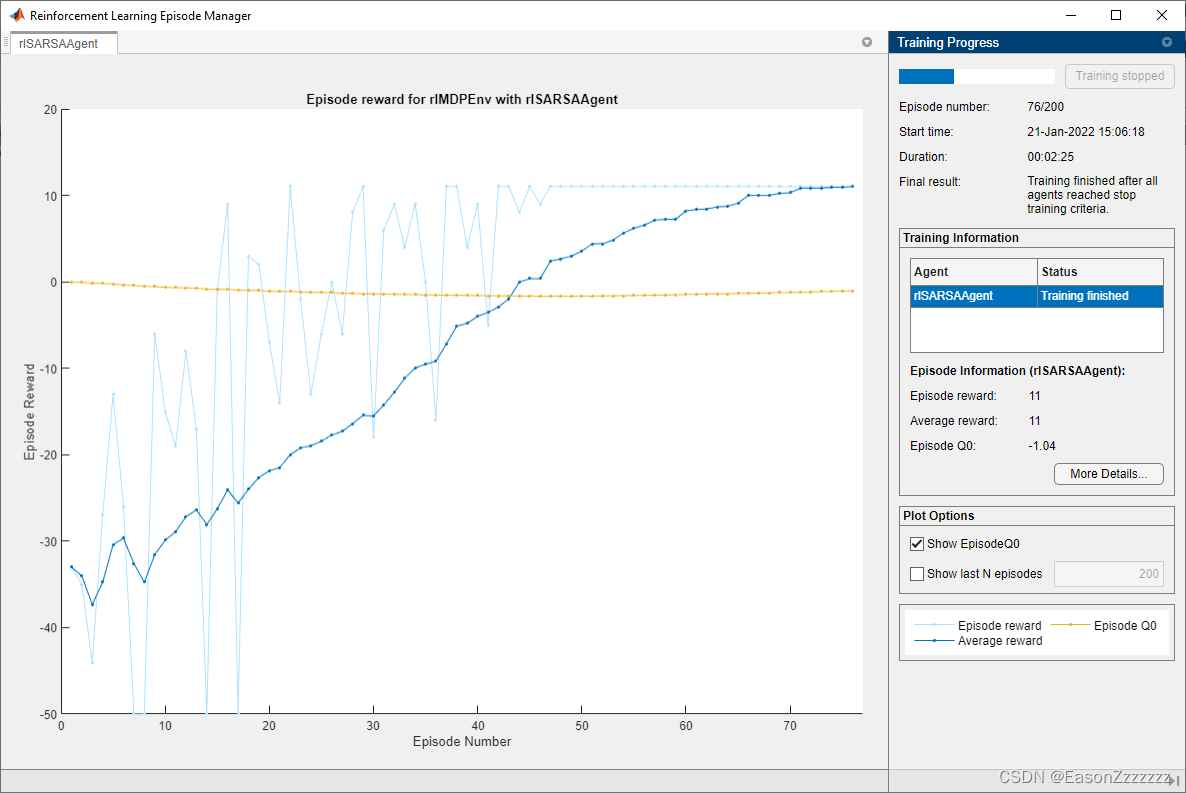
(6)验证 SARSA 结果
plot(env)
env.Model.Viewer.ShowTrace = true;
env.Model.Viewer.clearTrace;
在环境中对智能体进行仿真。
sim(sarsaAgent,env)
SARSA 智能体找到与 Q-learning 智能体相同的解决方案。
1.3、创建 Simulink 环境并训练智能体
这个例子展示了如何将水箱 Simulink 模型中的 PI 控制器转换为强化学习深度确定性策略梯度(DDPG)智能体。有关在 MATLAB 中训练 DDPG 智能体的示例,请参阅 Compare DDPG Agent to LQR Controller 。
(1)水箱模型
该模型的目标是控制水箱中的水位。有关水箱模型的更多信息,请参阅 watertank Simulink Model 。
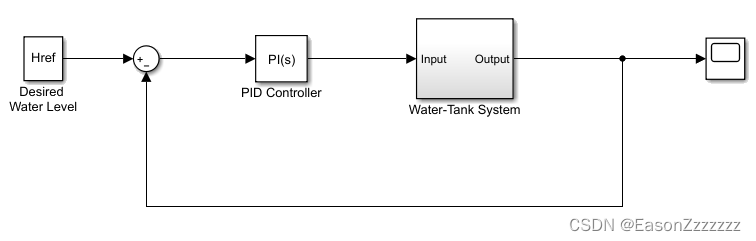
修改原始模型:
- 删除PID控制器
- 插入强化学习智能体模块
- 计算状态观测矢量 [ ∫ e d t e h ] T \left[\int\ e\ \mathrm{dt}\quad e\quad h\right]^T [∫ e dteh]T,其中 h h h 是水箱中的水位, e = r − h e=r−h e=r−h, r r r 是参考水位
- 设置奖励: r e w a r d = 10 ( ∣ e ∣ < 0.1 ) − 1 ( ∣ e ∣ ≥ 0.1 ) − 100 ( h ≤ 0 ∣ ∣ h ≥ 20 ) \mathrm{reward}=10\ (\ \mid e \mid<\ 0.1)\ -1\ (\ \mid e \mid\ \geq\ 0.1\ )\ -100\ (\ h\leq0\ ||\ h\geq20) reward=10 ( ∣e∣< 0.1) −1 ( ∣e∣ ≥ 0.1 ) −100 ( h≤0 ∣∣ h≥20)
- 设置终端信号,例如仿真在 h ≤ 0 h≤0 h≤0 或 h ≥ 20 h≥20 h≥20 时停止。
生成的模型是 r l w a t e r t a n k . s l x \mathrm{rlwatertank.slx} rlwatertank.slx。有关此模型和更改的详细信息,请参见创建自定义 Simulink 环境 。
open_system("rlwatertank")
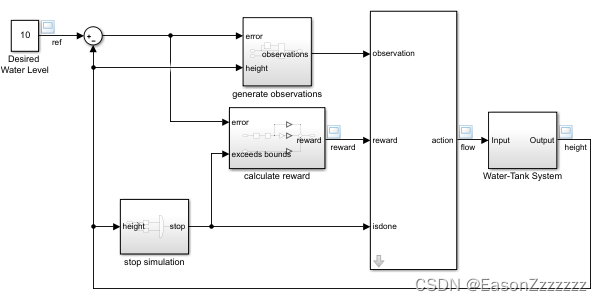
(2)创建环境
环境模型的创建包括以下内容:
- 智能体与环境交互的动作信号和状态观测信号。有关详细信息,请参见环境接口
- 智能体用来衡量其结果好坏的奖励信号。有关详细信息,请参见 在自定义环境中定义奖励和状态观测信号
定义状态观测明细 o b s I n f o \mathrm{obsInfo} obsInfo 和动作明细 a c t I n f o \mathrm{actInfo} actInfo。
% Observation info
obsInfo = rlNumericSpec([3 1],...LowerLimit=[-inf -inf 0 ]',...UpperLimit=[ inf inf inf]');% Name and description are optional and not used by the software
obsInfo.Name = "observations";
obsInfo.Description = "integrated error, error, and measured height";% Action info
actInfo = rlNumericSpec([1 1]);
actInfo.Name = "flow";
创建环境对象。
env = rlSimulinkEnv("rlwatertank","rlwatertank/RL Agent",...obsInfo,actInfo);
设置一个自定义重置函数,使模型的参考值随机化。
env.ResetFcn = @(in)localResetFcn(in);
指定仿真时间 T f T_f Tf和智能体采样时间 T s T_s Ts(单位为秒)。
Ts = 1.0;
Tf = 200;
设置随机数种子。
rng(0)
(3)创建 Critic
DDPG 智能体使用参数化动作价值函数来评估策略,它以当前状态观测和动作作为输入,输出单个标量(估计的未来折扣累积奖励)。
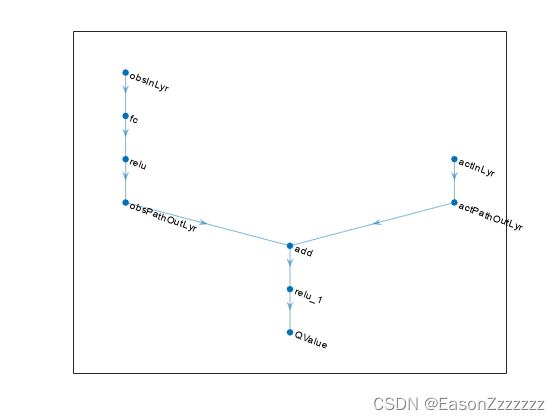
要在 critic 中对参数化动作价值函数进行建模,使用具有两个输入层(一个用于 o b s I n f o \mathrm{obsInfo} obsInfo 指定的状态观测通道,另一个用于 a c t I n f o \mathrm{actInfo} actInfo 指定的动作通道)和一个输出层( 返回标量值 )的神经网络。
将每条网络路径定义为层对象数组。为每个路径的输入和输出层指定名称。通过这些名称,可以连接各路径,然后将网络输入层和输出层与相应的环境通道明确关联。从 o b s I n f o \mathrm{obsInfo} obsInfo 和 a c t I n f o \mathrm{actInfo} actInfo 明细中获取状态观测空间和动作空间的维度。
% Observation path
obsPath = [featureInputLayer(obsInfo.Dimension(1),Name="obsInLyr")fullyConnectedLayer(50)reluLayerfullyConnectedLayer(25,Name="obsPathOutLyr")];% Action path
actPath = [featureInputLayer(actInfo.Dimension(1),Name="actInLyr")fullyConnectedLayer(25,Name="actPathOutLyr")];% Common path
commonPath = [additionLayer(2,Name="add")reluLayerfullyConnectedLayer(1,Name="QValue")];criticNetwork = layerGraph();
criticNetwork = addLayers(criticNetwork,obsPath);
criticNetwork = addLayers(criticNetwork,actPath);
criticNetwork = addLayers(criticNetwork,commonPath);criticNetwork = connectLayers(criticNetwork, ..."obsPathOutLyr","add/in1");
criticNetwork = connectLayers(criticNetwork, ..."actPathOutLyr","add/in2");
查看 Critic 网络配置。
figure
plot(criticNetwork)
将网络转换为 dlnetwork 对象并汇总其属性。
criticNetwork = dlnetwork(criticNetwork);
summary(criticNetwork)==> Initialized: trueNumber of learnables: 1.5kInputs:1 'obsInLyr' 3 features2 'actInLyr' 1 features
指定的深度神经网络、环境明细对象、网络输入与状态观测和动作通道相关联的名称,创建 Critic 对象。
critic = rlQValueFunction(criticNetwork, ...obsInfo,actInfo, ...ObservationInputNames="obsInLyr", ...ActionInputNames="actInLyr");
有关 Q-value 函数的更多信息,请参阅 rlQValueFunction 。
用随机输入的状态观测和动作来检查 Critic。
getValue(critic, ...{rand(obsInfo.Dimension)}, ...{rand(actInfo.Dimension)})==> ans = single-0.1631
有关创建 Critics 的详细信息,请参见 Create Policies and Value Functions 。
(4)创建 Actor
DDPG 智能体在连续动作空间上使用参数化的确定性策略,该策略由连续的确定性 Actor 学习。
Actor 将当前状态观测作为输入,返回动作作为输出。
对 Actor 进行建模,需使用具有一个输入层(如 o b s I n f o \mathrm{obsInfo} obsInfo 所指定,接收环境状态观测通道的内容)和一个输出层(如 a c t I n f o \mathrm{actInfo} actInfo 所指定,将动作返回到环境动作通道)的神经网络。
将网络定义为层对象数组。
actorNetwork = [featureInputLayer(obsInfo.Dimension(1))fullyConnectedLayer(3)tanhLayerfullyConnectedLayer(actInfo.Dimension(1))];
将网络转换为 dlnetwork 对象并汇总其属性。
actorNetwork = dlnetwork(actorNetwork);
summary(actorNetwork)==> Initialized: trueNumber of learnables: 16Inputs:1 'input' 3 features
使用指定的深度神经网络、环境明细对象以及与状态观测通道相关联的网络输入名称,创建 Actor 对象。
actor = rlContinuousDeterministicActor(actorNetwork,obsInfo,actInfo);
更多信息,请参阅 rlContinuousDeterministicActor 。
用随机输入状态观测数据检查 Actor。
getAction(actor,{rand(obsInfo.Dimension)})==> ans = 1x1 cell array{[-0.3408]}
(5)创建 DDPG 智能体
使用指定的 Actor 和 Critic 对象创建 DDPG 智能体。
agent = rlDDPGAgent(actor,critic);
更多信息,请参阅 rlDDPGAgent 。
指定智能体、Actor 和 Critic 。
agent.SampleTime = Ts;agent.AgentOptions.TargetSmoothFactor = 1e-3;
agent.AgentOptions.DiscountFactor = 1.0;
agent.AgentOptions.MiniBatchSize = 64;
agent.AgentOptions.ExperienceBufferLength = 1e6; agent.AgentOptions.NoiseOptions.Variance = 0.3;
agent.AgentOptions.NoiseOptions.VarianceDecayRate = 1e-5;agent.AgentOptions.CriticOptimizerOptions.LearnRate = 1e-03;
agent.AgentOptions.CriticOptimizerOptions.GradientThreshold = 1;
agent.AgentOptions.ActorOptimizerOptions.LearnRate = 1e-04;
agent.AgentOptions.ActorOptimizerOptions.GradientThreshold = 1;
或者,也可以使用 rlDDPGAgentOptions 对象指定智能体选项。
用随机输入状态观测结果检查智能体。
getAction(agent,{rand(obsInfo.Dimension)})==> ans = 1x1 cell array{[-0.7926]}
(6)训练智能体
首先要指定训练选项。本例中使用以下选项:
- 每次训练最多运行 5000 回合。指定每回合最多持续 ceil ( T f / T s T_f/T_s Tf/Ts) ( 即 200 )个时间步
- 在 "回合管理器 "对话框中显示训练进度(设置 Plots 选项),并禁用命令行显示( 将 Verbose 选项设为 false )
- 当智能体在连续 20 个回合中获得的平均累积奖励 > 800 时,停止训练。此时,智能体可以控制水箱中的水位
更多信息,请参阅 rlTrainingOptions 。
trainOpts = rlTrainingOptions(...MaxEpisodes=5000, ...MaxStepsPerEpisode=ceil(Tf/Ts), ...ScoreAveragingWindowLength=20, ...Verbose=false, ...Plots="training-progress",...StopTrainingCriteria="AverageReward",...StopTrainingValue=800);
使用函数 train 训练智能体。训练是一个计算密集型过程,需要几分钟才能完成。为节省运行此示例的时间,请将 doTraining 设为 false,以加载预训练过的智能体。要自己训练代理,可将 doTraining 设为 true。
doTraining = false;if doTraining% Train the agent.trainingStats = train(agent,env,trainOpts);
else% Load the pretrained agent for the example.load("WaterTankDDPG.mat","agent")
end

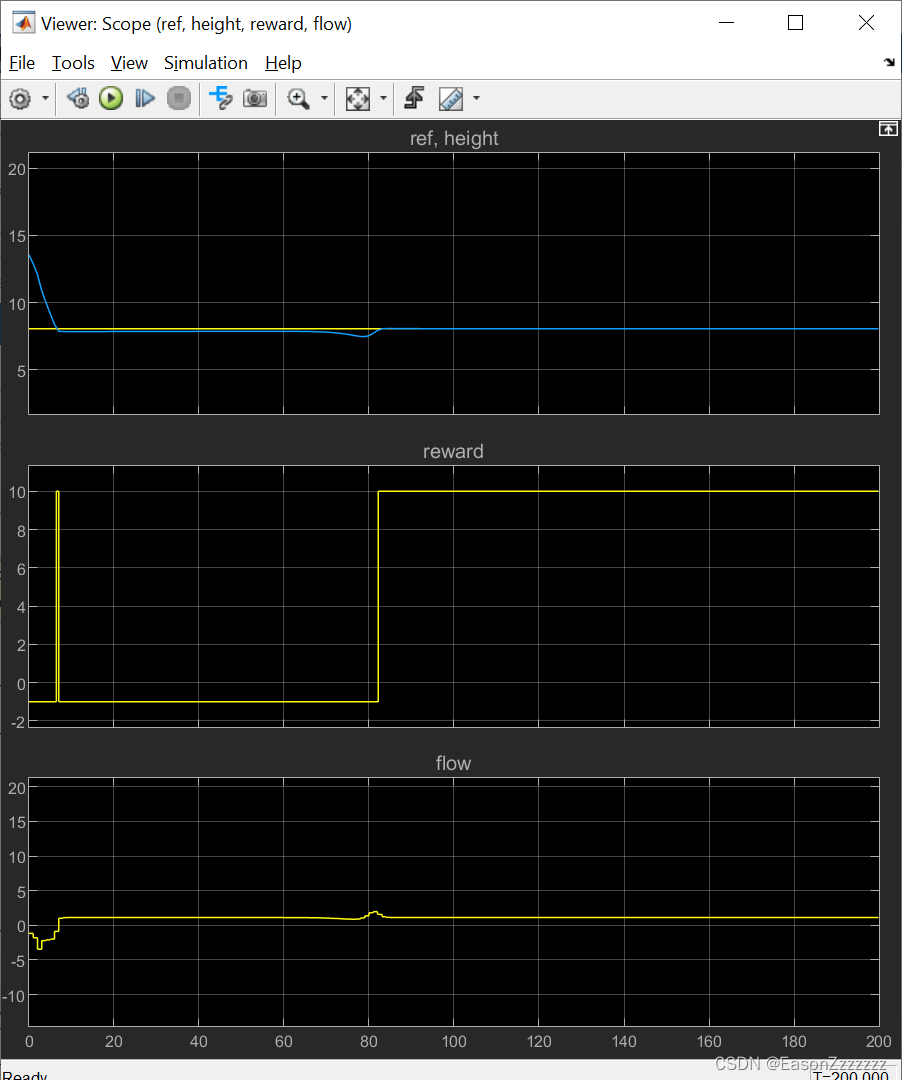
(7)验证 DDPG 智能体
根据模型仿真验证 DDPG 智能体。由于重置函数会随机化参考值,因此要固定随机数种子,以确保可重复性。
rng(1)
在环境中仿真,并将输出返回。
simOpts = rlSimulationOptions(MaxSteps=ceil(Tf/Ts),StopOnError="on");
experiences = sim(env,agent,simOpts);
(8)本地重置函数
function in = localResetFcn(in)% Randomize reference signal
blk = sprintf("rlwatertank/Desired \nWater Level");
h = 3*randn + 10;
while h <= 0 || h >= 20h = 3*randn + 10;
end
in = setBlockParameter(in,blk,Value=num2str(h));% Randomize initial height
h = 3*randn + 10;
while h <= 0 || h >= 20h = 3*randn + 10;
end
blk = "rlwatertank/Water-Tank System/H";
in = setBlockParameter(in,blk,InitialCondition=num2str(h));end