by fanxiushu 2024-03-14 转载或引用请注明原作者
把Windows电脑模拟成蓝牙鼠标和蓝牙键盘,简单的说,就是把笨重的PC电脑当成鼠标键盘来使用。
这应该是一个挺小众的应用,但有时感觉也应该算比较好玩吧,
毕竟实现一种一般人都感觉没戏的功能,
尤其是windows平台中,并不是简单实现蓝牙服务端,还得做一个小小的破解。
windows电脑当成蓝牙鼠标键盘,这个功能有什么用呢?
可以用来控制手机啊!我最初研究把windows当成蓝牙鼠标键盘,确实是出于这个目的。
我们先来看看手机系统,Android和iOS,
Android不知道从哪个版本开始,已经可以提供用户层API,可以直接调用对应接口,
直接在程序中进行 touch,mouse,keyboard 等控制模拟。也就是说,Android系统是可以通过编程实现被远程控制的。
但iOS比较特殊,至今都没看到集成这样的用户层API来进行输入控制模拟。
因此iOS是没法像目前的通用远程控制软件那样,直接远程控制iOS系统。当然,只是投屏的话是没问题的。
以前开发iOS系统下的xdisp_virt远程控制程序,苦于找不到对应的输入模拟接口,只能把xdisp_virt当成投屏来使用。
后来发现iOS系统虽然不提供对应接口,但是却支持蓝牙鼠标键盘。
于是就打起了模拟蓝牙鼠标键盘的主意。
当然,蓝牙鼠标键盘模拟,不等同于普通意义上的远程控制,因为蓝牙传输距离有限 ,也就顶多几十米。
我们也可以使用一个笨办法:
使用linux系统电脑(因为linux下的蓝牙鼠标键盘更好模拟)模拟出蓝牙鼠标键盘,然后连上iOS苹果手机。
然后linux系统模拟的蓝牙鼠标键盘程序再通过普通网络把控制事件传输出去,这样就能达到普通意义上的远程控制了。
就是麻烦了些。
回到正题,如何在windows平台实现蓝牙鼠标键盘呢?
一般桌面电脑模拟设备终端,都有天然的障碍,因为当初设计就不是为了实现设备功能的。
比如要把桌面电脑模拟成 USB 设备,需要底层硬件支持,需要有UDC硬件控制器。
有了UDC底层硬件还不够,还得系统提供对应接口,
好在linux内核很早前就提供了UDC对应系统接口,windows10以上的系统也提供了UDC接口。
值得庆幸的是蓝牙设计的时候,同时提供了服务端和客户端,也就是同时提供了两端。
这也挺好理解,蓝牙本质就是无线传输,如果蓝牙传输堆栈只提供客户端或者只提供服务端,就像缺胳膊少腿一样。
蓝牙鼠标和蓝牙键盘是作为蓝牙服务端对外提供服务的。而且是作为HID标准的输入设备。
因此本文也只阐述蓝牙服务端的实现过程,至于蓝牙客户端如何实现,可以去查阅WDK下的例子代码。
具体例子代码在bluetooth或者bth目录下的bthecho目录,它同时演示了服务端和客户端,以及如何安装。
例子代码是实现自己的上层传输(ECHO回显),但是作为蓝牙鼠标键盘,其上层传输协议是固定和公开的。
这也是与例子不同的地方,除此之外,流程什么的都是一样的。
开发windows蓝牙服务端,需要实现以下几个部分:
1,初始化驱动,获取 BTH_PROFILE_DRIVER_INTERFACE,
BTHDDI_SDP_PARSE_INTERFACE,BTHDDI_SDP_NODE_INTERFACE
等三个接口,里边全是接口函数,用于后面处理,其中第一个接口主要是BRB分配和释放,第二,三个用于生成SDP信息
2,注册PSM,因为蓝牙鼠标键盘(就是统一的HID输入设备)的PSM是固定的 0x11 和 0x13, 其中0x11用于传输控制信息,
0x13传输具体的鼠标键盘事件。
但是windows系统把0x11和0x13作为保留值,也就是说,我们在自己的蓝牙驱动中,是无法注册这两个值的。
这就是windows最大的坑,而且是一开始就让你觉得没戏的坑。
因为它无法通过修改某些配置信息改变,而是被硬编码到windows系统组件中。
3,注册 L2CAP Server, 并且设置接收回调函数,也就是说如果有蓝牙客户端连上来,这个回调函数就会被调用,
从而建立起连接,传输数据。
4,创建并且发布带有 HID 报告描述的 SDP 。
5,从第3步骤注册的L2CAP Server的回调函数中,接收到蓝牙客户端的连接请求,然后回复之后,连接就建立起来了。
客户端会发起 0x11 和 0x13 共两条连接,根据 4 步骤的HID SDP配置,会在0x11控制传输中收到某些控制命令,
响应这些命令,然后就可以通过 0x13这个连接,发送固定格式的鼠标键盘事件数据。
通过已上步骤,一个蓝牙鼠标键盘就模拟成功了。
通过以上我们也能发现,这个跟socket网络编程的服务端很像:
第1步骤就像是创建socket, 第2步骤是bind绑定socket,第3,4步骤在listen,
第5步骤就是 accept了。最后就是send和recv 了。
当然,为了更好的理解和开发蓝牙鼠标键盘驱动,我们还得去网上下载 蓝牙的 HID规范文档,
因为里边规定了蓝牙HID数据传输格式,SDP协议格式等。
同时也得准备windows的WDK开发包中 tools目录下的 bluetooth ,其中 sdpverify.exe 可以帮我们查看 SDP协议格式,
而蓝牙HID 格式内容较多,光看规范文档,是很头大的,所以还不如找个现成的蓝牙鼠标,然后用sdpverify程序查看SDP格式,
再然后仿照它建立自己的HID SDP 。
首先初始化蓝牙驱动,这就按照一般的 即插即用wdm驱动开发就可以了,
需要特别主意的是,它的安装方式比较特别,
我们需要使用 应用层WIN32API 函数 BluetoothSetLocalServiceInfo 创建一个底层设备,然后再把我们的驱动安装上去,
只有这样我们的驱动才是蓝牙驱动,才能获取到BTH_PROFILE_DRIVER_INTERFACE等接口。
接着在驱动的AddDevice初始化函数中,获取到BTH_PROFILE_DRIVER_INTERFACE等接口。
如果你是使用KMDF框架的(微软例子里也是KMDF框架)可以直接使用 WdfFdoQueryForInterface 函数获取。
而我的驱动是基于WDM的(以下阐述的都是基于WDM实现的蓝牙驱动)。所以得自己实现,其实也不难。如下:
NTSTATUS query_interface(PDEVICE_OBJECT device_object,
LPCGUID InterfaceType, PINTERFACE Interface,
USHORT Size, USHORT Version, PVOID InterfaceSpecificData)
{
NTSTATUS status = STATUS_SUCCESS;
KEVENT event;
PIRP irp;
IO_STATUS_BLOCK ioStatusBlock;
PIO_STACK_LOCATION irpStack;
KeInitializeEvent(&event, NotificationEvent, FALSE);
irp = IoBuildSynchronousFsdRequest(IRP_MJ_PNP,
device_object,
NULL,
0,
NULL,
&event,
&ioStatusBlock);
if (irp == NULL) {
status = STATUS_INSUFFICIENT_RESOURCES;
return status;
}
irpStack = IoGetNextIrpStackLocation( irp );
irpStack->MinorFunction = IRP_MN_QUERY_INTERFACE;
irpStack->Parameters.QueryInterface.InterfaceType =
(LPGUID)InterfaceType;
irpStack->Parameters.QueryInterface.Size = Size;
irpStack->Parameters.QueryInterface.Version = Version;
irpStack->Parameters.QueryInterface.Interface =
(PINTERFACE)Interface;
irpStack->Parameters.QueryInterface.InterfaceSpecificData = InterfaceSpecificData;
//
// Initialize the status to error in case the bus driver does not
// set it correctly.
irp->IoStatus.Status = STATUS_NOT_SUPPORTED ;
status = IoCallDriver( device_object, irp );
if (status == STATUS_PENDING) {
status = KeWaitForSingleObject( &event, Executive, KernelMode, FALSE, NULL);
status = ioStatusBlock.Status;
}
return status;
}
然后如下调用
status = query_interface(fdo->LowerDeviceObject,
&GUID_BTHDDI_SDP_PARSE_INTERFACE, (PINTERFACE)&fdo->sdp_parse_interface,
sizeof(fdo->sdp_parse_interface), BTHDDI_SDP_PARSE_INTERFACE_VERSION_FOR_QI, NULL);
就获取到了 BTH_PROFILE_DRIVER_INTERFACE 接口,使用同样办法获取其他两个用于操作 SDP 的接口。
同USB驱动类似, 蓝牙驱动使用 BRB 结构来传输数据,因此我们先实现一些通用函数,比如如下同步提交brb的函数:
///同步提交BRB
NTSTATUS bth_sync_call_driver(PDEVICE_OBJECT device_object, PVOID Brb )
{
NTSTATUS status = STATUS_SUCCESS;
KEVENT event;
IO_STATUS_BLOCK ioStatus;
KeInitializeEvent(&event, NotificationEvent, FALSE);
PIRP irp = IoBuildDeviceIoControlRequest(IOCTL_INTERNAL_BTH_SUBMIT_BRB,
device_object, NULL, 0, NULL,
0, TRUE, &event, &ioStatus);
///
if (!irp){
return STATUS_INSUFFICIENT_RESOURCES;
}
PIO_STACK_LOCATION nextStack = IoGetNextIrpStackLocation(irp);
nextStack->Parameters.Others.Argument1 = Brb;
status = IoCallDriver(device_object, irp);
if (status == STATUS_PENDING){
KeWaitForSingleObject(&event, Executive, KernelMode, FALSE, NULL); /// wait for ever
status = ioStatus.Status;
}
return status;
}
然后还可以实现异步传输 NTSTATUS bth_async_call_driver(
PDEVICE_OBJECT device_object, PVOID Brb,
void(*brb_complete)(brb_async_context* brb_ctx), PVOID ctx)
其中BrB就是BRB指针,brb_complete 是当完成这个brb请求时候的完成函数。brb_async_context是自己定义的结构体。
这里不再罗嗦列出代码了。
当初始化驱动完成,我们就需要开始注册 PSM了。这些需要注册 0x11和0x13,两个都需要注册。
PSM注册伪代码如下:
struct _BRB_PSM * brb;
brb = (struct _BRB_PSM*)brb_alloc(fdo, bRegister ? BRB_REGISTER_PSM : BRB_UNREGISTER_PSM );
brb->Psm = PSM; // 这里应该是 0x11和0x13,两个都需要分别注册,
status = bth_sync_call_driver(fdo->LowerDeviceObject, brb);
brb_free(fdo, brb);
是的,注册PSM就这么简单,上面代码把注册和注销放到一起了。
但是注册0x11和0x13,肯定不会成功,既然这个都不会成功,那么接下来注册L2CAP等步骤也没有了意义。
这是因为在PSM注册过程中,windows系统组件会对PSM值做判断,如果是系统保留的,自然就会失败。
因此,为了保证注册成功,我们就得想办法让这个判断失效,
这等于是在做破解,不过破解的不是应用层的dll,
而是驱动sys文件,具体完成这个注册的系统组件是 bthport.sys ,bthport.sys如同应用层的dll一样,
是个扩展库,主要是帮忙实现蓝牙驱动的核心功能,比如注册,传输等各类都是在bthport.sys中完成。
所以可以对bthport.sys做逆向,比如使用 IDA工具软件进行分析,然后就会发现 里边有个未公开的函数
BthIsSystemPSM ,就是判断是否是系统保留的PSM,我们只要让这个函数失效,自然就能成功注册0x11和0x13了。
下面的连接(就有阐述如何破解BthIsSystemPSM函数)
Windows Kernel | Nadav's Blog
至于关于这方面的更多的内容,以后的章节会详细阐述。
接着,我们需要注册L2CAP Server,注册这个不会有什么系统保留限制,只要不出其他问题,都会成功
如下伪代码,注册L2CAP Server:
struct _BRB_L2CA_REGISTER_SERVER *brb;
brb = (struct _BRB_L2CA_REGISTER_SERVER*)brb_alloc(fdo, BRB_L2CA_REGISTER_SERVER);
brb->BtAddress = BTH_ADDR_NULL;
brb->PSM = 0; //we have already registered the PSM
brb->IndicationCallback = &SrvIndicationCallback;
brb->IndicationCallbackContext = userCtx;
brb->IndicationFlags = 0;
brb->ReferenceObject = fdo->DeviceObject;
status = bth_sync_call_driver(fdo->LowerDeviceObject, brb ); //调用同步提交BRB函数,
fdo->L2CAPServerHandle = brb->ServerHandle; /// save ptr,保持此句柄,再注销的时候会使用到
brb_free(fdo, brb);
static void SrvIndicationCallback(
__in PVOID Context,
__in INDICATION_CODE Indication,
__in PINDICATION_PARAMETERS Parameters
{
bth_hid_user_t* user = (bth_hid_user_t*)Context;
switch (Indication)
{
case IndicationRemoteConnect: 有客户端连接上来,
{
DPT("@@@@@@ Ctrl Connect --- PSM=0x%X; addr=%p\n",
Parameters->Parameters.Connect.Request.PSM,
Parameters->BtAddress );
bth_connect_remote(user, Parameters); 调用我们的函数,初始化有新客户端连上的各种结构,并且回复客户端
break;
}
}
}
以上就是注册L2CAP Server的过程,接下来就是如何创建 HID SDP 和发布SDP了。
HID SDP 的内容有点多,创建起来有点麻烦,以下是我的HID SDP内容:
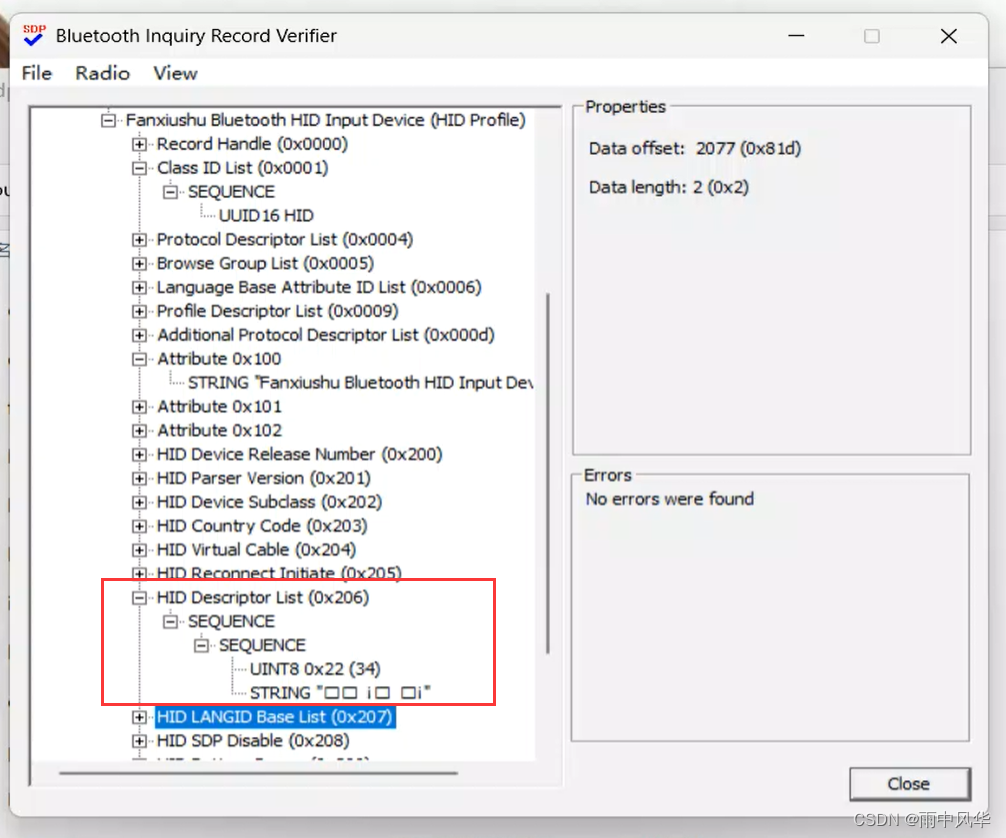
包括的内容基本如上图所描述的那样,其中红色框中的 HID Descriptor List 包含的就是HID REPORT DESC
这个就是 HID REPORT DESC 则是标准的HID报告描述符,关于这个细节可以去查阅HID的规范文档。
至于如何生成 SDP报告, 则是全程使用 BTHDDI_SDP_NODE_INTERFACE 来构建各种NODE,
最终合并到 PSDP_TREE_ROOT_NODE 根 root tree 中,代码调用细节可以去查阅 微软的bthecho例子代码。
然后调用 BTHDDI_SDP_PARSE_INTERFACE 接口中的 SdpConvertTreeToStream 函数把root tree序列化为 stream,
假设序列化为Stream, 大小为StreamSize,再通过 IOCTL_BTH_SDP_SUBMIT_RECORD 把这个SDP Publish出去,
让蓝牙客户端能够看到我们的蓝牙HID设备,伪代码如下:
KEVENT event;
IO_STATUS_BLOCK ioStatus;
KeInitializeEvent(&event, NotificationEvent, FALSE);
HANDLE_SDP handle = HANDLE_SDP_NULL;
PIRP irp = IoBuildDeviceIoControlRequest(IOCTL_BTH_SDP_SUBMIT_RECORD, / 发布SDP的 IOCTL
fdo->LowerDeviceObject, Stream, StreamSize, &handle,
sizeof(HANDLE_SDP), FALSE, &event, &ioStatus);
status = IoCallDriver(fdo->LowerDeviceObject, irp);
if (status == STATUS_PENDING) {
KeWaitForSingleObject(&event, Executive, KernelMode, FALSE, NULL); /// wait for ever
status = ioStatus.Status;
}
至此之后,我们就可以安心等待蓝牙客户端连上来。
当有蓝牙客户端连上来之后,上面注册L2CAP Server时候设置的SrvIndicationCallback回调函数就会被调用。
我们响应 IndicationRemoteConnect 请求,在这个请求中,我们需要构建 _BRB_L2CA_OPEN_CHANNEL 的 BRB,
然后回答给客户端,只有这样才能真正建立起一条新的连接。
大致伪代码如下:
NTSTATUS bth_connect_remote(bth_hid_user_t* user, PINDICATION_PARAMETERS Parameters)
{
。。其他初始化代码
_BRB_L2CA_OPEN_CHANNEL* brb
brb = (_BRB_L2CA_OPEN_CHANNEL*)brb_alloc(user->fdo, BRB_L2CA_OPEN_CHANNEL_RESPONSE);
///init brb
brb->Hdr.ClientContext[0] = client; /client是我们新建的结构体,代表一个蓝牙连接
brb->BtAddress = Parameters->BtAddress;
brb->Psm = Parameters->Parameters.Connect.Request.PSM;
brb->ChannelHandle = Parameters->ConnectionHandle;
brb->Response = CONNECT_RSP_RESULT_SUCCESS;
brb->ChannelFlags = CF_ROLE_EITHER;
brb->ConfigOut.Flags = 0;
brb->ConfigIn.Flags = 0;
brb->ConfigOut.Flags |= CFG_MTU;
brb->ConfigOut.Mtu.Max = L2CAP_DEFAULT_MTU;
brb->ConfigOut.Mtu.Min = L2CAP_MIN_MTU;
brb->ConfigOut.Mtu.Preferred = L2CAP_DEFAULT_MTU;
brb->ConfigIn.Flags = CFG_MTU;
brb->ConfigIn.Mtu.Max = brb->ConfigOut.Mtu.Max;
brb->ConfigIn.Mtu.Min = brb->ConfigOut.Mtu.Min;
brb->ConfigIn.Mtu.Preferred = brb->ConfigOut.Mtu.Max;
//
// Get notifications about disconnect
//设置对方断开连接的时候的回调函数
brb->CallbackFlags = CALLBACK_DISCONNECT;
brb->Callback = &BthSvrConnectionIndicationCallback;
brb->CallbackContext = client;
brb->ReferenceObject = user->fdo->DeviceObject;
/// 采用异步方式调用BRB,以免阻塞系统的回调函数,
status = bth_async_call_driver(user->fdo->LowerDeviceObject, brb, open_channel_response_complete, client);
。。。。
}
static void
BthSvrConnectionIndicationCallback(
__in PVOID Context,
__in INDICATION_CODE Indication,
__in PINDICATION_PARAMETERS Parameters
)
{
。。。。
switch(Indication)
{
case IndicationRemoteDisconnect: / 客户端已经关闭了此连接,我们也需要关闭以及释放相关结构
。。。。
break;
}
}
static void open_channel_response_complete( brb_async_context* brbctx)
{
NTSTATUS status = brbctx->Irp->IoStatus.Status;
。。。。 回答客户端已经完成,通过判断 status 来确定是否已经成功建立了连接。
if (NT_SUCCESS(status)) { /// response success..
client->handle = brb->ChannelHandle; 需要使用此handle 来接收和发送蓝牙数据包
client->address = brb->BtAddress; 远端蓝牙地址
client->OutMTU = brb->OutResults.Params.Mtu;
client->InMTU = brb->InResults.Params.Mtu;
。。。。其他处理。。。。
}
}
至此,客户端发起的一个连接就建立了起来,我们可以通过这个连接收和发送蓝牙数据。‘
未完待续。。。