OpenCV 单目相机标定

本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.rhkb.cn/news/278755.html
如若内容造成侵权/违法违规/事实不符,请联系长河编程网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章

鸿蒙Harmony应用开发—ArkTS声明式开发(画布组件:Canvas)
提供画布组件,用于自定义绘制图形。 说明: 该组件从API Version 8开始支持。后续版本如有新增内容,则采用上角标单独标记该内容的起始版本。 子组件
不支持。
接口
Canvas(context?: CanvasRenderingContext2D)
从API version 9开始&…
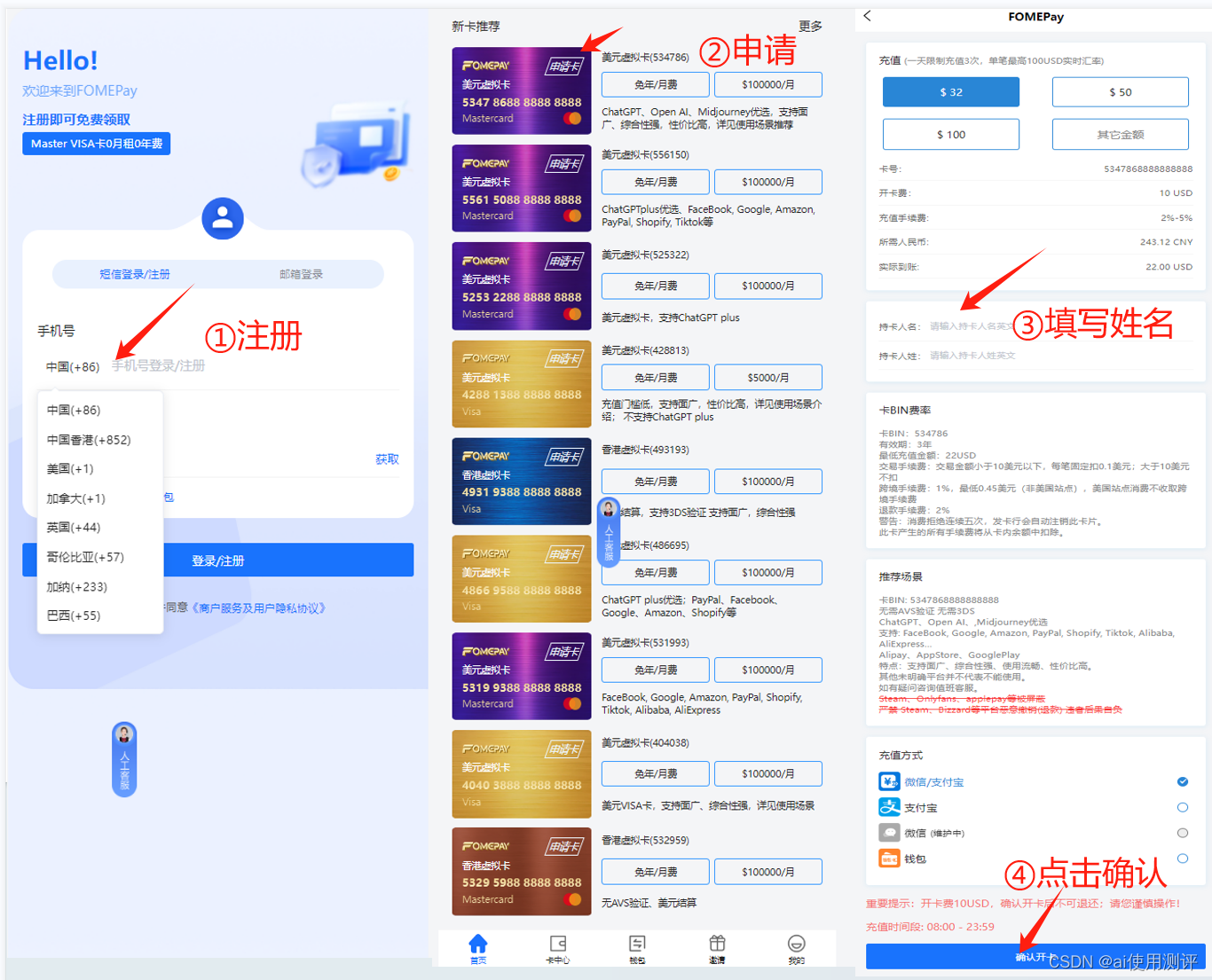
huawei services HK华为云服务
huaweiserviceshk是一种云计算服务,为华为云服务用户提供了多种服务,包括云服务器、数据库、存储、网络等,用户可以根据自己的需求选择不同的服务并支付相应的费用
如何付费呢,这里可以使用441112,点击获取 卡片信息在…
机器人可反向驱动能力与力控架构
反向驱动性是电机传动系统的机械特性,它描述了运动是否可以轻松反转 。特别是,反向驱动能力取决于两个因素:传动运动效率和整体执行器机械阻抗。反向运动中传动装置的低运动效率意味着所施加的外力的大部分被运动反作用力抵消。然而ÿ…
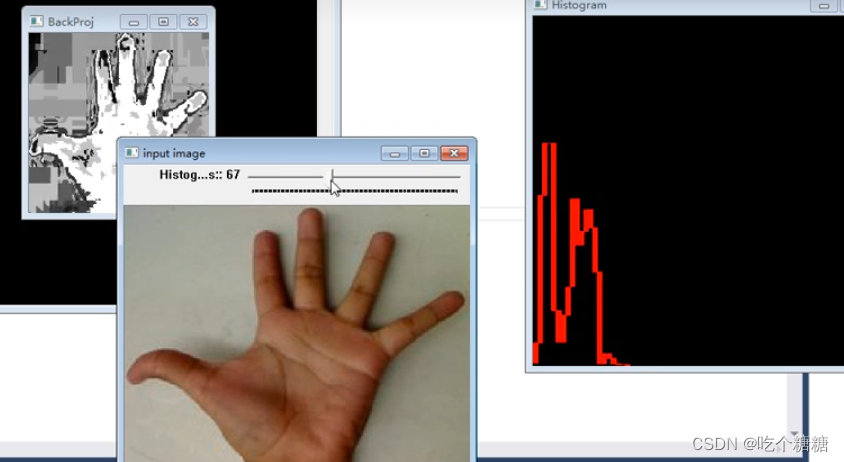
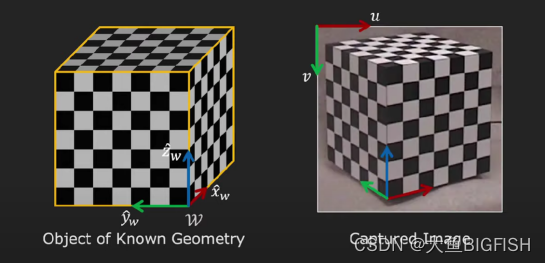
24 OpenCV直方图反向投影
文章目录 参考反向投影作用calceackProject 反向投影mixchannels 通道图像分割示例 参考
直方图反向投影
反向投影 反向投影是反映直方图模型在目标图像中的分布情况简单点说就是用直方图模型去目标图像中寻找是否有相似的对象。通常用HSV色彩空间的HS两个通道直方图模型 作用…
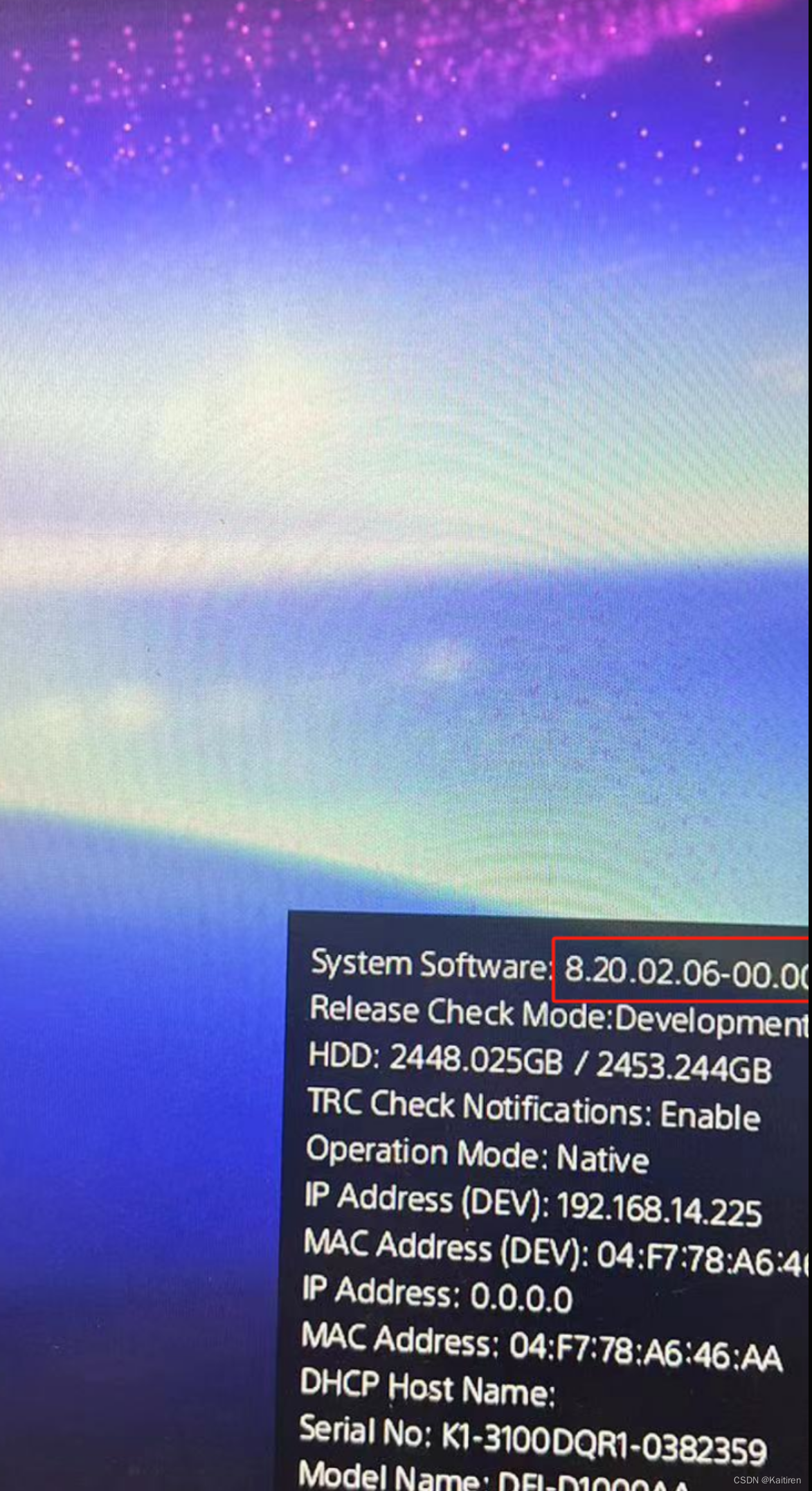
Unity PS5开发 天坑篇 之 DEVKit环境部署与系统升级02
上一篇各位大神们已经收到了SONY官方免费寄送的PS5开发机与测试机,恭喜大家成为SONY的开发者, 本篇继续PS5开发机的部署与开发套件使用。 一, PC安装PS5 SDK与系统升级
1. PC/PS5 SDK Manager下载安装包
登录开发者账号后,Development->Resources&a…

Android 开发环境搭建(Android Studio 安装图文详细教程)
Android Studio 下载
https://developer.android.google.cn/studio?hlzh-cn
Android Studio 安装 检查电脑是否启用虚拟化 如果没有开启虚拟化,则需要进入电脑的 BIOS 中开启 直接 next选择安装的组件,Android Studio 和 Android 虚拟设备ÿ…
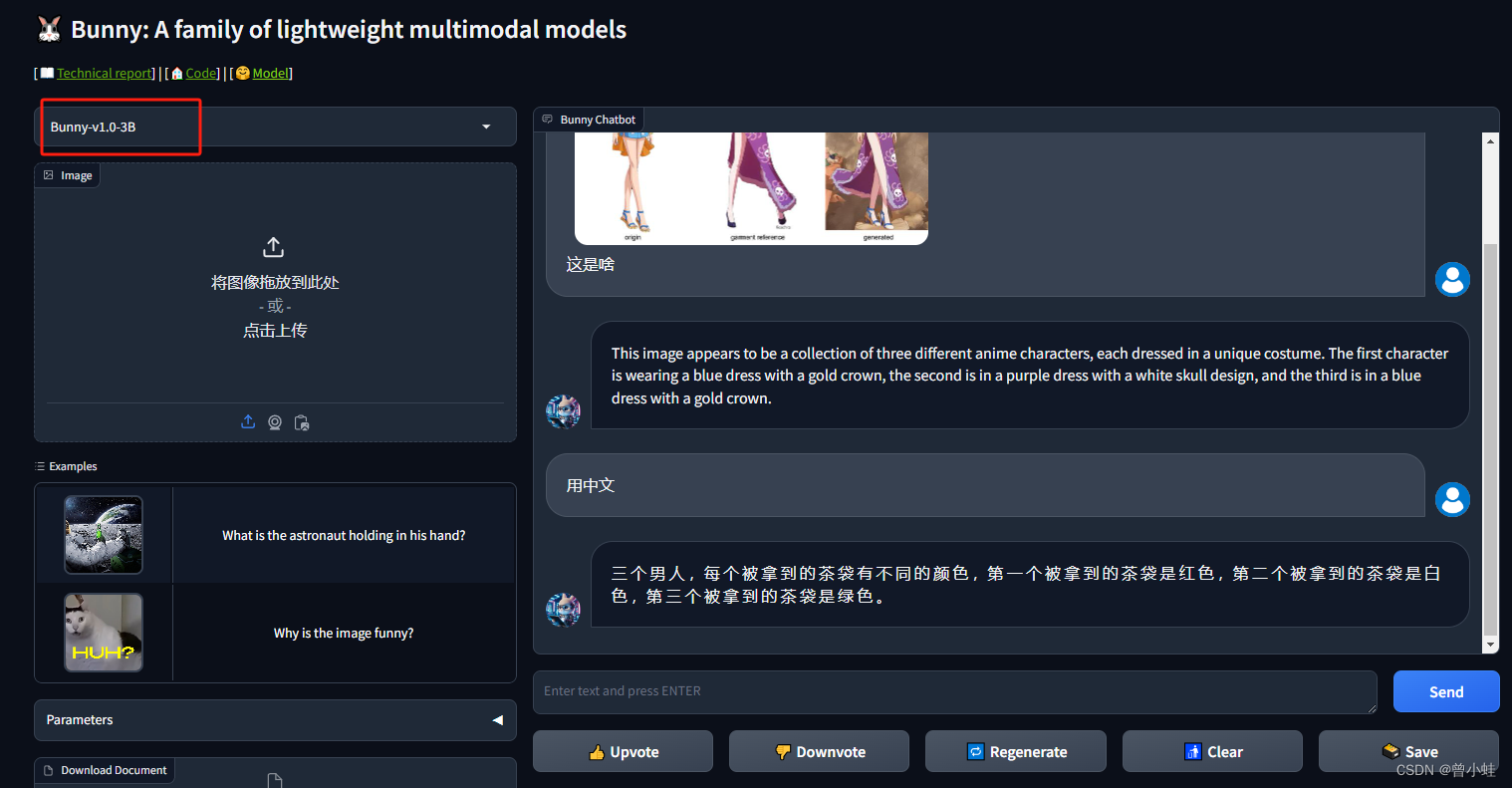
【MLLM+轻量多模态模型】24.02.Bunny-v1.0-2B-zh: 轻量级多模态语言模型 (效果一般)
24.02 北京人工智能研究院(BAAI)提出以数据为中心的轻量级多模态模型
arxiv论文:2402.Efficient Multimodal Learning from Data-centric Perspective 代码:https://github.com/BAAI-DCAI/Bunny 在线运行:https://wis…

【GDB Debugger】新手快速入门学习笔记
文章目录 前言第一讲 什么是GDB第二讲 搭建实验环境第三讲 快速开始第四讲 举例说明如何查看变量信息——print、step第五讲 使用GDB的技巧(只在此展开观察点)第六讲 调试core文件(针对UNIX,程序崩溃时)第七讲 调试一个…

如何搭建“Docker Registry私有仓库,在CentOS7”?
1、下载镜像Docker Registry
docker pull registry:2.7.1 2、运行私有库Registry
docker run -d -p 5000:5000 -v ${PWD}/registry:/var/lib/registry --restartalways --name registry registry:2.7.1 3、拉取镜像
docker pull busybox 4、打标签,修改IP&#x…
uniapp可视范围高度 - 用户屏幕可操作的屏幕高度 - 适用于APP、H5@公众号、纯H5@Chrome
可视范围高度 let heightPx uni.getWindowInfo().windowHeight uni.getWindowInfo().windowTop 官方手册
uni.getWindowInfo() | uni-app官网uni-app,uniCloud,serverless,uni.getWindowInfo()https://uniapp.dcloud.net.cn/api/system/getWindowInfo.html 实测数据
uni.ge…

BI让数据分析不在困难,分解企业数据分析流程
一、数据培养
数据分析最关键的是什么?其实从名字上就可以看出来,数据是一切的关键,没有数据的话数据分析从何谈起呢。但数据的积累不是一天两天就能成功的,企业的一定要有培养数据的意识,在业务活动中沉淀数据&#…
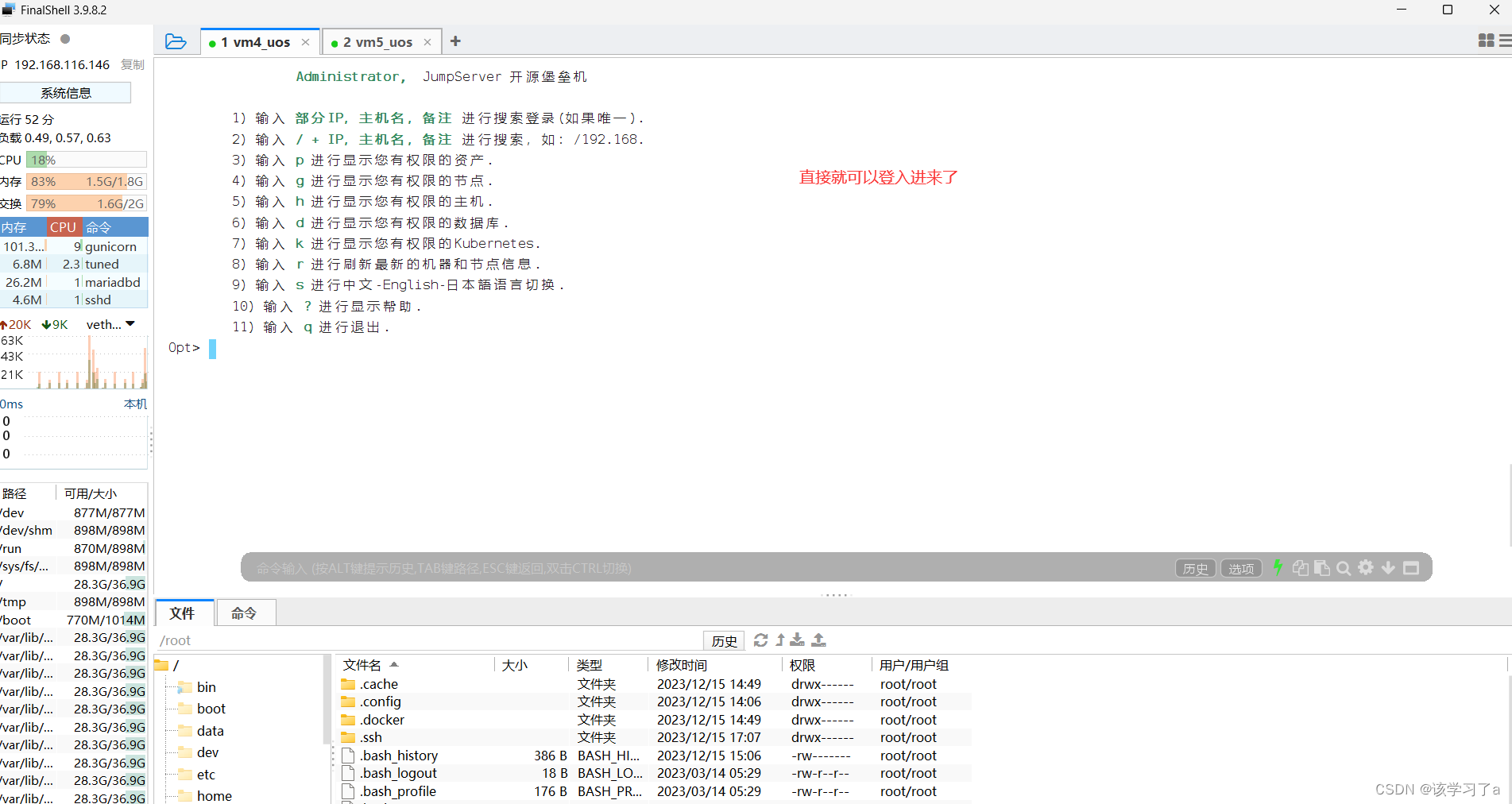
开源堡垒机Jumpserver
开源堡垒机Jumpserver 文章目录 开源堡垒机Jumpserver1 Jumpserver介绍2 Jumpserver部署用户管理资产创建账号管理模板添加 用户组管理权限管理远程连接免密连接 1 Jumpserver介绍
Jumpserver 是全球首款完全开源的堡垒机,使用 GNU GPL v2.0 开源协议,是…
《论文阅读》EmpDG:多分辨率交互式移情对话生成 COLING 2020
《论文阅读》EmpDG:多分辨率交互式移情对话生成 COLING 2020 前言简介模型架构共情生成器交互鉴别器损失函数前言
亲身阅读感受分享,细节画图解释,再也不用担心看不懂论文啦~ 无抄袭,无复制,纯手工敲击键盘~
今天为大家带来的是《EmpDG: Multi-resolution Interactive E…

文心一言赋能问卷生成,打造高效问卷调研工具
当前,各种大语言模型(LLM,Large Language Model)井喷式发展,基于LLM的应用也不断涌现。但是,当开发者基于LLM开发下游应用时,LLM直接生成的结果在格式、内容等方面都存在许多不确定因素…
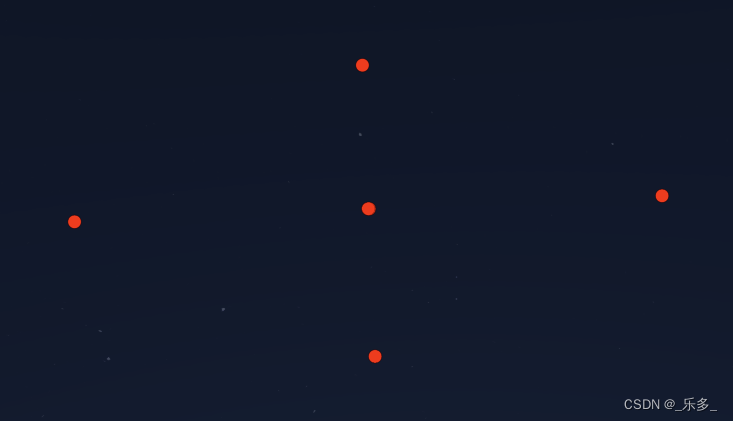
Cesium:绘制一个 3DTiles 对象的外包盒顶点
作者:CSDN @ _乐多_
本文将介绍如何使用 Cesium 引擎根据模型的中心坐标,半轴信息,绘制一个 3DTiles 对象的外包盒顶点。
外包盒是一个定向包围盒(Oriented Bounding Box),它由一个中心点(center)和一个包含半轴(halfAxes)组成。半轴由一个3x3的矩阵表示,这个矩阵…
Python Web开发记录 Day13:Django part7 Ajax入门与案例(任务管理)
名人说:莫道桑榆晚,为霞尚满天。——刘禹锡(刘梦得,诗豪) 创作者:Code_流苏(CSDN)(一个喜欢古诗词和编程的Coder😊) 目录 1、Ajax入门①简介②工作原理③优点④缺点⑤使用…
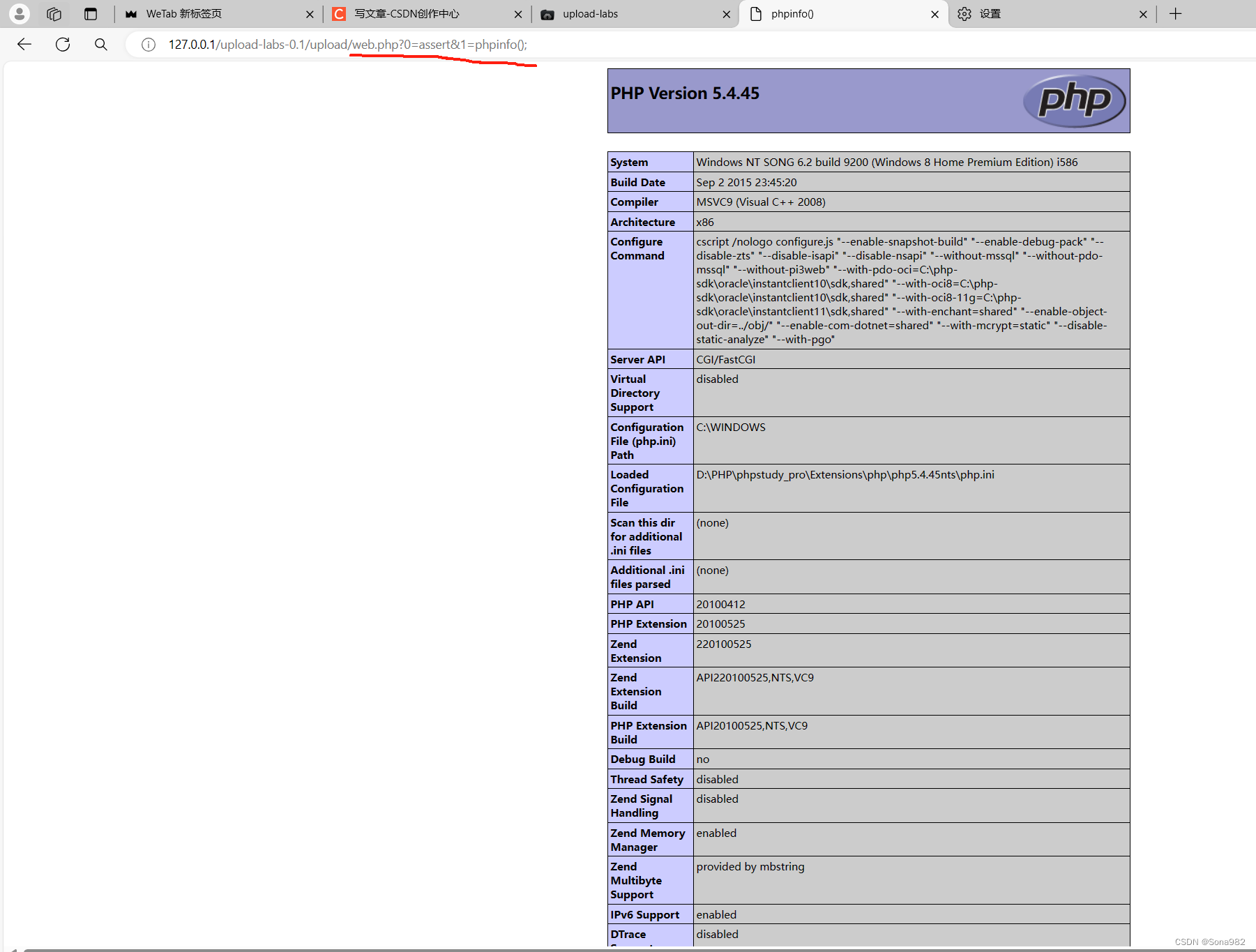
upload-labs-pass01
1.安装好环境进入关卡(记得打开小皮) 2.可以看到第一关是要求上传图片,但是同时限制了图片类型,那么如果我们将木马写入图片,但是类型又不在白名单,就要想办法绕过 3.可以看到这里的要求是有checkÿ…
中国银行信息系统应用架构发展历程
概述: 从 20 世纪 80 年代开始至今,我国银行业信息化历程已 有四十年历史。虽然相对于发达国家来讲,我国银行业务信 息化起步较晚,但发展速度很快, 目前我国一些大型商业银行的信息化程度已经处于全球领先水平。 “银行…
web渗透测试漏洞复现:Elasticsearch未授权漏洞复现
web渗透测试漏洞复现 Elasticsearch未授权漏洞复现Elasticsearch简介Elasticsearch复现Elasticsearch漏洞修复和加固措施 Elasticsearch未授权漏洞复现
Elasticsearch简介
Elasticsearch 是一款 Java 编写的企业级搜索服务,它以分布式多用户能力和全文搜索引擎为特…

Vue3学习日记 Day4 —— pnpm,Eslint
注:此课程需要有Git的基础才能学习
一、pnpm包管理工具 1、使用原因 1.1、速度快,远胜过yarn和npm 1.2、节省磁盘空间 2、使用方式 2.1、安装方式 npm install -g pnpm 2.2、创建项目 pnpm create vue 二、Eslint配置代码风格
1、环境同步 1、禁用Pret…
推荐文章
- 【收录 Hello 算法】6.4 小结
- 7.1 项目1 学生通讯录管理:文本文件增删改查(C++版本)(自顶向下设计+断点调试) (A)
- LeetCode解法汇总83. 删除排序链表中的重复元素
- 三江学院图书馆藏八一新书《乡村振兴战略下传统村落文化旅游设计》
- 运行paddlehub报错,提示:UnicodeDecodeError: ‘gbk‘ codec can‘t decode byte…**
- # Go学习-Day6
- ### 通达信数据之实时机构持股数据接口
- #LT8713SX适用于Type-C/DP1.4转三路Type-C/DP1.4/HDMI2.0应用方案,分辨率高达4K60HZ,支持SST/MST功能。
- #stm学习总结 (二十八)硬件随机数实验
- #数据结构(一)
- (42)MATLAB中使用fftshift绘制以零为中心的功率谱
- (HttpClient技术)(Hotmail和outlook系列)Hotmail和outlook的邮箱注册破解