Matlab 双目相机标定(内置函数)

本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.rhkb.cn/news/282707.html
如若内容造成侵权/违法违规/事实不符,请联系长河编程网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章
_nodemon自动重启服务器
文章目录 1.安装模块 nodemon1.1安装方式2.jason文件里面可以存储自定义指令 由于每次修改代码都要重启服务器,所以我们希望有一种方式自动监视代码修改,自动启动服务器nodemon模块解决了这个问题 1.安装模块 nodemon
1.1安装方式
全局安装 npm i node…
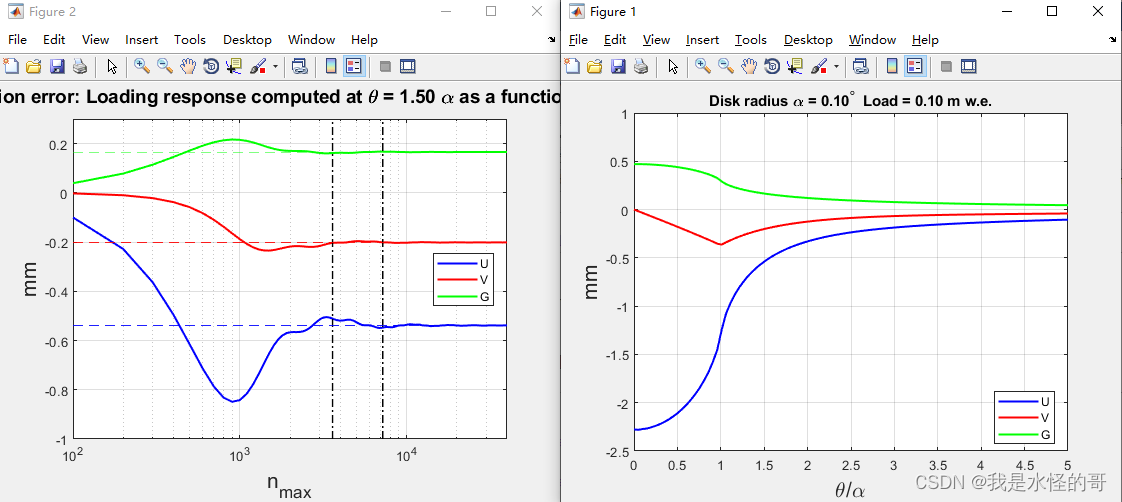
计算地球圆盘负荷产生的位移
1.研究背景 计算受表面载荷影响的弹性体变形问题有着悠久的历史,涉及到许多著名的数学家和物理学家(Boussinesq 1885;Lamb 1901;Love 1911,1929;Shida 1912;Terazawa 1916;Munk &…
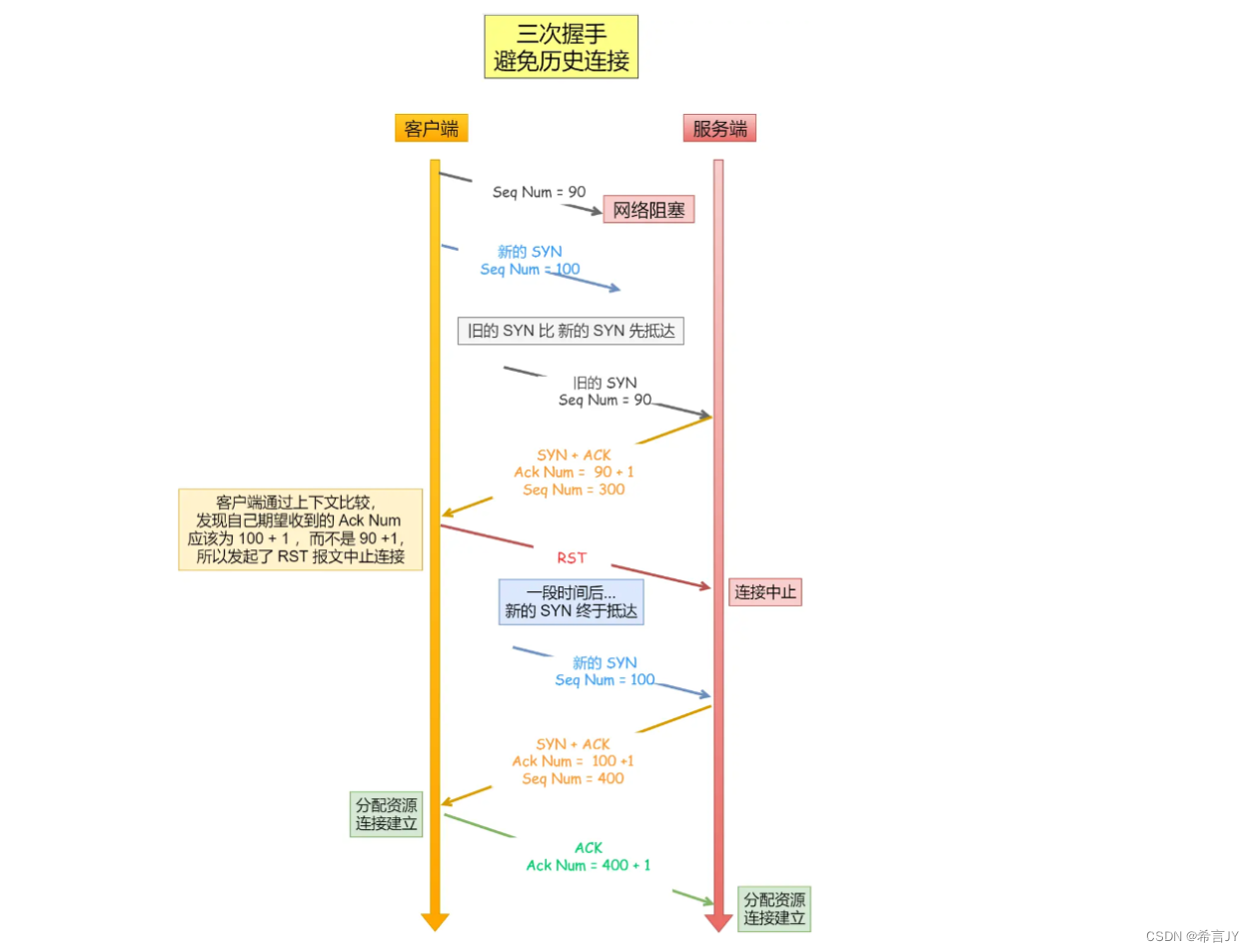
TCP | TCP协议格式 | 三次握手
1.TCP协议 为什么需要 TCP 协议 ?TCP 工作在哪一层? IP网络层是不可靠的,TCP工作在传输层,保证数据传输的可靠性。 TCP全称为 “传输控制协议(Transmission Control Protocol”)。
TCP 是面向连接的、可靠…

京东云开发者:DDD 学习与感悟 —— 向屎山冲锋
原文地址:https://mp.weixin.qq.com/s/Hvq1ttBopbxypatVcKcLiA 软件系统是通过软件开发来解决某一个业务领域或问题单元而产生的一个交付物。而通过软件设计可以帮助我们开发出更加健壮的软件系统。因此,软件设计是从业务领域到软件开发之间的桥梁。而DDD是软件设计…
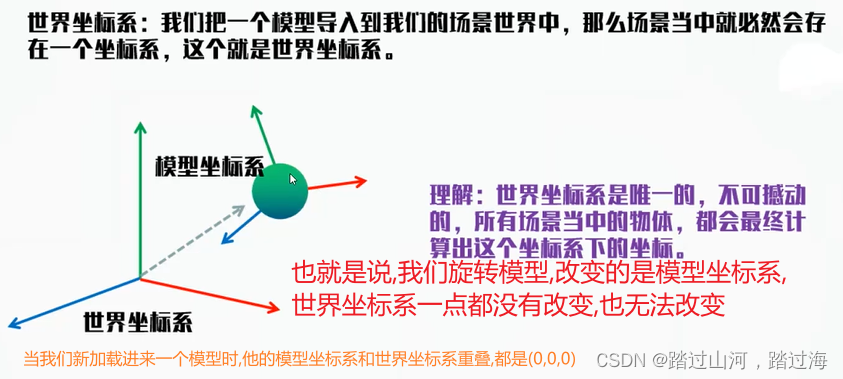
opengl 学习(六)-----坐标系统与摄像机
坐标系统与摄像机 分类引言坐标系统摄像机教程在CMake中使用全局定义预编译宏,来控制是否开启错误检查补充 分类
opengl c
引言
OpenGL希望在每次顶点着色器运行后,我们可见的所有顶点都为标准化设备坐标(Normalized Device Coordinate, NDC)。也就是说ÿ…

OCP NVME SSD规范解读-14.Firmware固件升级要求
4.11节 Firmware Update Requirements 描述了数据中心NVMe SSD固件更新的具体要求,确保固件升级过程既安全又可靠,同时充分考虑了设备在升级过程中的可用性和功能性。 FWUP-1: 设备必须记录每一次固件激活过程。这意味着固件升级过程中,设备会…
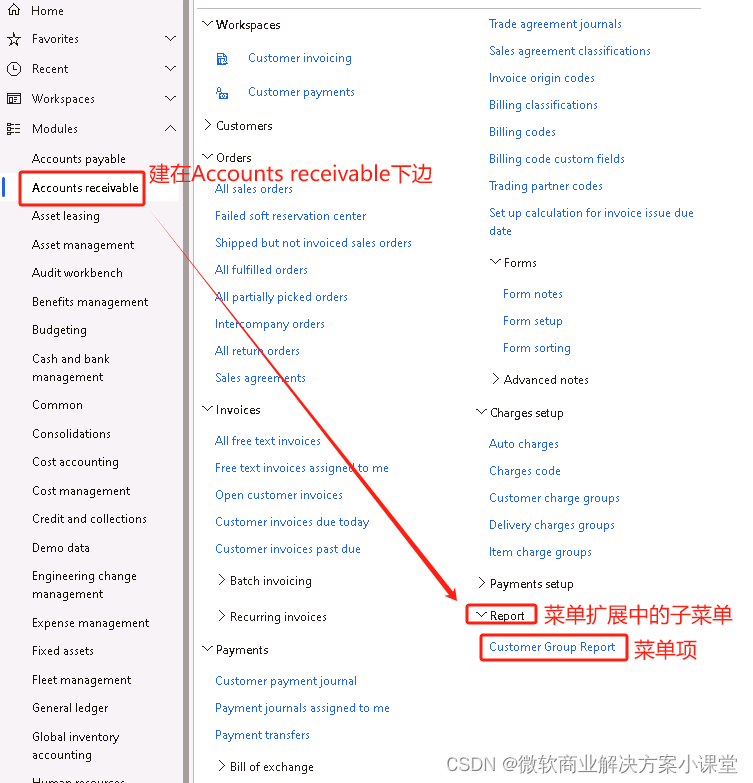
【Dynamics 365 FO】在Dynamics 365中建立一个SSRS报表
建立一个SSRS报表主要有以下8个步骤:
目录
1、新建合约类
合约类(Contract Class)的作用是获取查询数据源所需要的数据,在我们点开报表的时候,系统会弹出一个对话框让我们来选择字段来筛选要查询数据,合…

基于Java的厦门旅游电子商务预订系统(Vue.js+SpringBoot)
目录 一、摘要1.1 项目介绍1.2 项目录屏 二、功能模块2.1 景点类型模块2.2 景点档案模块2.3 酒店管理模块2.4 美食管理模块 三、系统设计3.1 用例设计3.2 数据库设计3.2.1 学生表3.2.2 学生表3.2.3 学生表3.2.4 学生表 四、系统展示五、核心代码5.1 新增景点类型5.2 查询推荐的…

CANoe自带的TCP/IP协议中TCP发送时的一个特殊处理(我一定是第一个发现的)
我们知道,CANoe软件中配置以太网通道后,添加的仿真节点可以作为一个主机或者一个应用来实现以太网通信。但不管是作为主机还是应用,仿真节点都需要配置TCP/IP协议栈。 有了TCP/IP协议栈,设置了网卡信息后(IP地址、MAC地址等),仿真节点就可以通过编写CAPL代码的方式发送和…

![[综述笔记]A Survey on Deep Learning for Neuroimaging-Based Brain Disorder Analysis](https://img-blog.csdnimg.cn/direct/1cf513b14de8429d8ac02a71046ca056.png)
[综述笔记]A Survey on Deep Learning for Neuroimaging-Based Brain Disorder Analysis
论文网址:Frontiers | A Survey on Deep Learning for Neuroimaging-Based Brain Disorder Analysis (frontiersin.org)
英文是纯手打的!论文原文的summarizing and paraphrasing。可能会出现难以避免的拼写错误和语法错误,若有发现欢迎评论…

visual studio卸载几种方法
1、控制面板卸载; 2、有时候会发现控制面板卸载会失败,无法卸载,这时候要先把下面目录的关于visual studio的都删除,然后重启电脑后,重新安装vs即可。
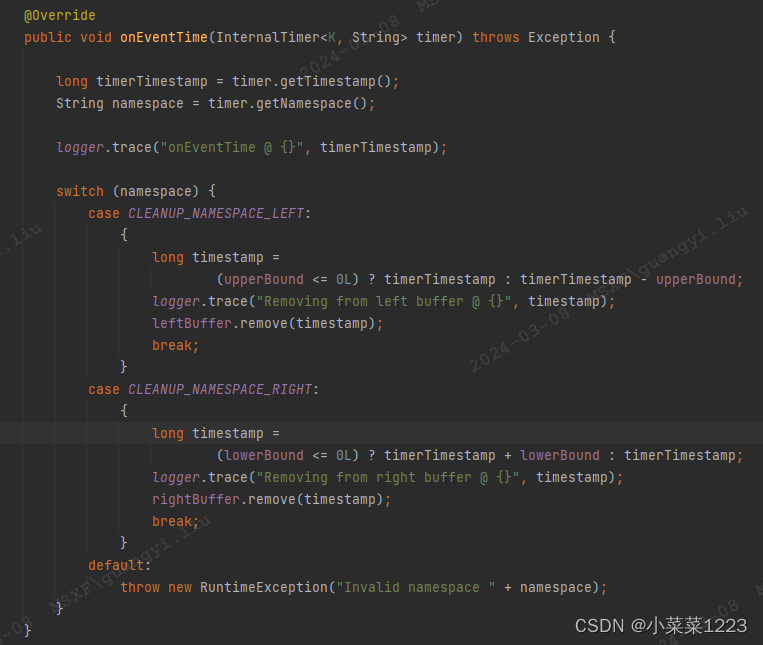
java Flink(四十三)Flink Interval Join源码解析以及简单实例
背景
之前我们在一片文章里简单介绍过Flink的多流合并算子
java Flink(三十六)Flink多流合并算子UNION、CONNECT、CoGroup、Join
今天我们通过Flink 1.14的源码对Flink的Interval Join进行深入的理解。
Interval Join不是两个窗口做关联,…
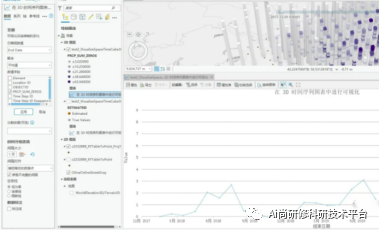
全流程ArcGIS Pro技术应用
GIS是利用电子计算机及其外部设备,采集、存储、分析和描述整个或部分地球表面与空间信息系统。简单地讲,它是在一定的地域内,将地理空间信息和 一些与该地域地理信息相关的属性信息结合起来,达到对地理和属性信息的综合管理。GIS的…
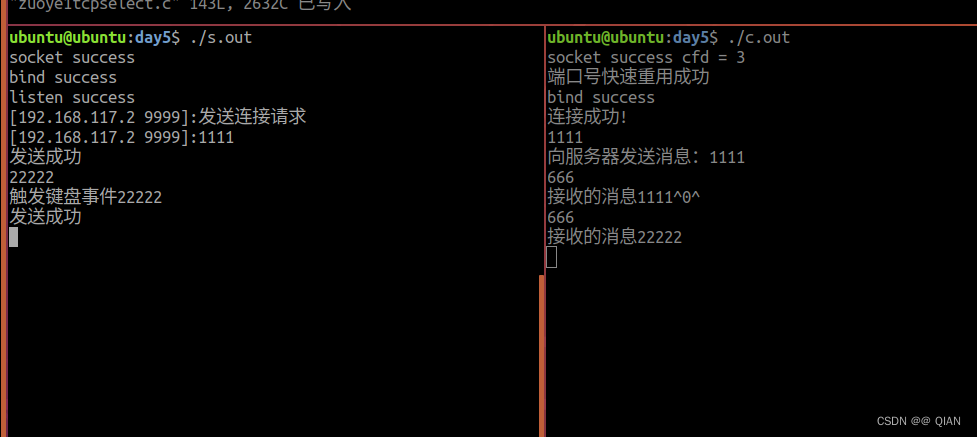
HQYJ 2024-3-19 作业
TCP通信三次握手和四次挥手:
并行和并发的区别:并发是单核处理器处理多个线程任务,并行是多核处理器同时处理多个线程任务。并发过程中会抢占CPU资源,轮流使用;并行过程不会抢占CPU资源。
阻塞IO和非阻塞IOÿ…
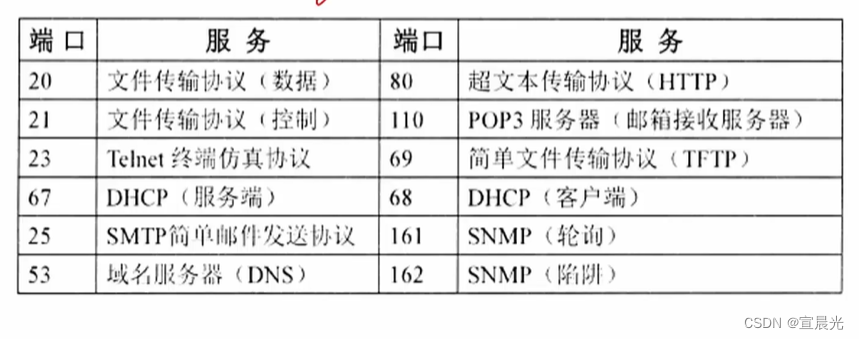
【系统架构师】-计算机网络
1、网络的划分
网络性能指标:速率、带宽(频带宽度或传送线路速率)、吞吐量、时延、往返时间、利用率。
网络非性能指标:费用、质量、标准化、可靠性、可扩展性、可升级性、易管理性和可维护性。 总线型(利用率低、干扰大、价格低)、
星型(交换机转发形…
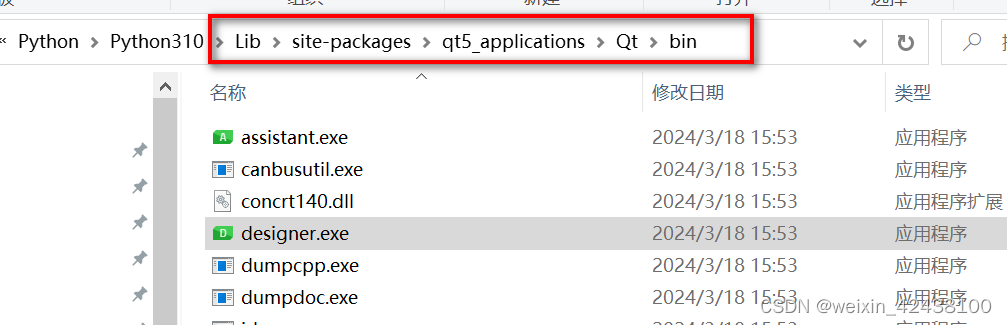
Python PyQt5
实现界面开发,与tkinter功能一致,网上已有详细资料,此处仅记录自己的代码: 文章目录 1. 实操1.1 main.py1.2. 窗体模块代码1.3. 页面效果 2. 参考资料2.1. PyQt5 参考资料2.2. tkinter 参考资料 3. 安装注意事项3.1. 下载3.2 Pyc…
解决jenkins运行磁盘满的问题
参考:https://blog.csdn.net/ouyang_peng/article/details/79225993
分配磁盘空间相关操作: https://cloud.tencent.com/developer/article/2230624
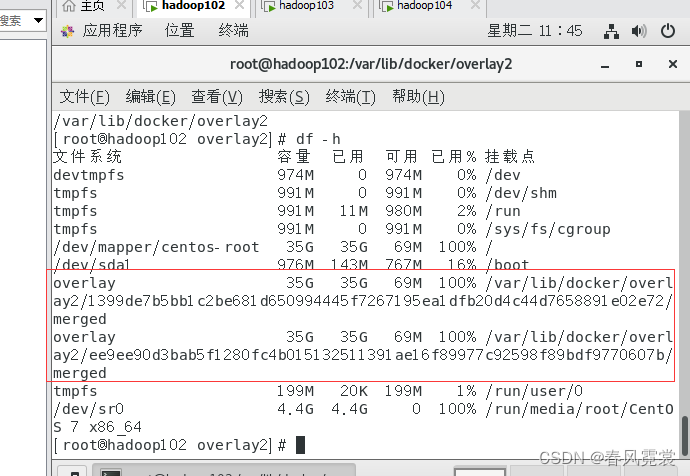
登录jenkins相对应的服务或容器中查看磁盘情况:
df -h在102挂载服务器上看到是这两个文件…
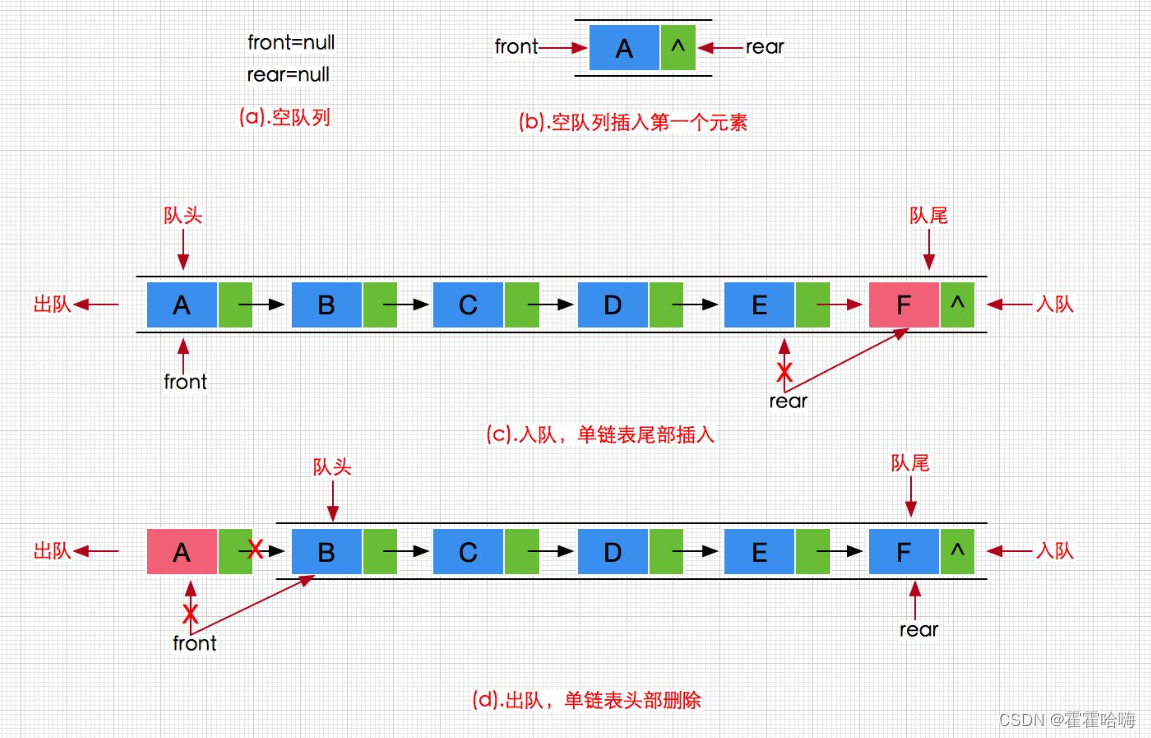
数据结构:详解【栈和队列】的实现
目录 1. 栈1.1 栈的概念及结构1.2 栈的实现1.3 栈的功能1.4 栈的功能的实现1.5 完整代码 2. 队列2.1 队列的概念及结构2.2 队列的实现2.3 队列的功能2.4 队列的功能的实现2.5 完整代码 1. 栈
1.1 栈的概念及结构
栈:一种特殊的线性表,其只允许在固定的…

leecode1793 | 好子数组的最大分数 | 求给高度矩阵最大值
题目我就不念了,就一个字难理解,给的题总是这么难懂,总感觉出题人的语文是体育老师教的? 还有就是思维转变,才能能好的理解?一味的钻牛角尖死理解,效果不好 思维的转变 >悟性?&am…
推荐文章
- Chrome插件:React Developer Tools为React开发调试而生
- #渗透测试#SRC漏洞挖掘#云技术基础02之容器与云
- (八)k8s实战-身份认证与权限
- (待会删)yyds,疯传全网的ChatGPT,请低调使用!
- (二)ffmpeg 下载安装以及拉流推流示例
- (每日一问)计算机网络:GET请求和POST请求的区别
- (前瞻篇)机器学习与深度学习对比
- (文章复现)建筑集成光储系统规划运行综合优化方法matlab代码
- (五)Spark大数据开发实战:灵活运用PySpark常用DataFrame API
- (转)图灵测试与人工智能
- .a文件和.so文件
- .DevicData-P-XXXXXXXX勒索病毒数据怎么处理|数据解密恢复