介绍
本篇Codelab是基于TS扩展的声明式开发范式编程语言,以及OpenHarmony的分布式能力实现的一个手柄游戏。
说明: 本示例涉及使用系统接口,需要手动替换Full SDK才能编译通过。
完成本篇Codelab需要两台开发板,一台开发板作为游戏端,一台开发板作为手柄端,实现如下功能:
- 游戏端呈现飞机移动、发射子弹等效果。
- 游戏端分布式拉起手柄端FA。
- 手柄端与游戏端建立连接,发送指令给游戏端,比如移动飞机,发射子弹和释放技能等。
最终效果图如下:

搭建OpenHarmony环境
完成本篇Codelab我们首先要完成开发环境的搭建,本示例以RK3568开发板为例,参照以下步骤进行:
- 获取OpenHarmony系统版本:标准系统解决方案(二进制)。
以3.1版本为例:

2.搭建烧录环境。
- 完成DevEco Device Tool的安装
- 完成RK3568开发板的烧录
3.搭建开发环境。
- 开始前请参考工具准备,完成DevEco Studio的安装和开发环境配置。
- 开发环境配置完成后,请参考使用工程向导创建工程(模板选择“Empty Ability”),选择JS或者eTS语言开发。
- 工程创建完成后,选择使用真机进行调测。
分布式组网
本章节以系统自带的音乐播放器为例(具体以实际的应用为准),介绍如何完成两台设备的分布式组网。
- 硬件准备:准备两台烧录相同的版本系统的RK3568开发板A、B。
- 开发板A、B连接同一个WiFi网络。
打开设置-->WLAN-->点击右侧WiFi开关-->点击目标WiFi并输入密码。
3.将设备A,B设置为互相信任的设备。
- 找到系统应用“音乐”。

- 设备A打开音乐,点击左下角流转按钮,弹出列表框,在列表中会展示远端设备的id。

- 选择远端设备B的id,另一台开发板(设备B)会弹出验证的选项框。
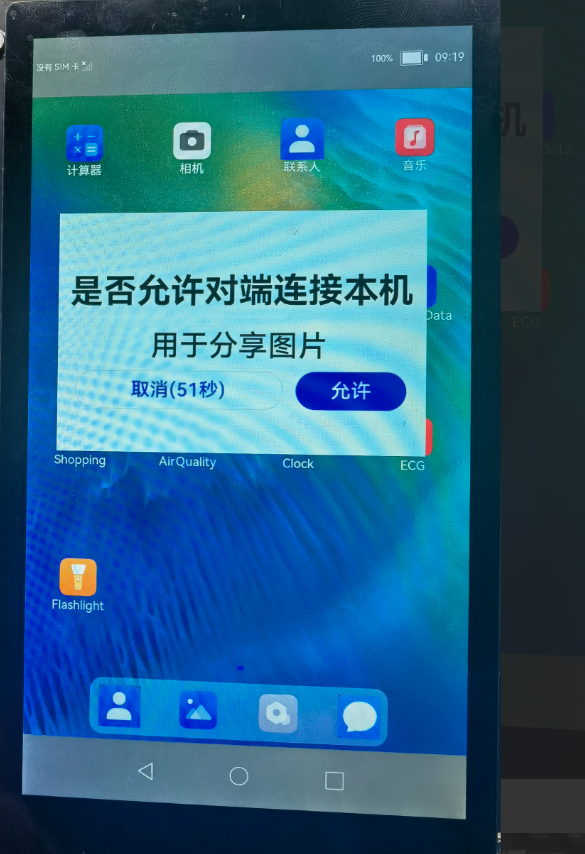
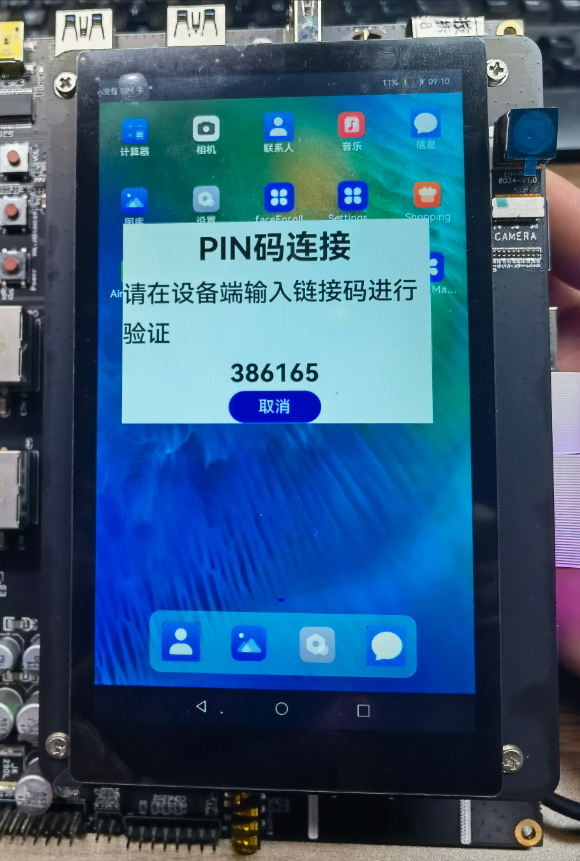
- 设备B点击允许,设备B将会弹出随机PIN码,将设备B的PIN码输入到设备A的PIN码填入框中。

- 配网完毕。
代码结构解读
- HandleEtsOpenHarmony
- GameEtsOpenHarmony
本篇Codelab只对核心代码进行讲解,首先介绍一下整个工程的代码结构:
└── HandleGameApplication│── GameEtsOpenHarmony│ └── HandleEtsOpenHarmony其中HandleEtsOpenHarmony为手柄端工程代码,GameEtsOpenHarmony为游戏端工程代码。
HandleEtsOpenHarmony

- MainAbility:存放应用主页面。
- pages/index.ets:应用主页面。
- common/images:存放图片资源的目录。
- ServiceAbility:存放ServiceAbility相关文件。
- service.ts:service服务,用于跨设备连接后通讯。
GameEtsOpenHarmony

- MainAbility:存放应用主页面。
- pages/index.ets:应用主页面。
- common/images:存放图片资源。
- model:存放获取组网内的设备列表相关文件。
- RemoteDeviceModel.ets:获取组网内的设备列表。
- GameElement.ets:游戏端界面元素的实体类,用于封装子弹、飞机等元素的属性。
- ServiceAbility:存放ServiceAbility相关文件。
- service.ts:service服务,用于跨设备连接后通讯。
实现手柄端功能
- 实现布局和样式。
手柄端有两个功能:向游戏端发送指令和实时获取游戏端得分数据。界面上有三个功能组件:蓝色图形组件用于控制游戏端飞机移动方向,黄色图形组件用于发射子弹,绿色图形组件用于释放技能,效果图如下:

主要代码如下:
@Entry
@Component
struct Index {
...build() {Stack() {...Text('score:' + this.score)...Flex({ direction: FlexDirection.Column, alignItems: ItemAlign.Start, justifyContent: FlexAlign.SpaceBetween }) {Stack() {Image('/common/images/bigcircle.png').width(300).height(300)Image('/common/images/smallcircle.png').width(140).height(140).position({ x: this.smallPosX, y: this.smallPosY }) // 30+75-35}...Row() {Image('/common/images/a.png').width(160).height(160).margin({ right: 20, bottom: 80 })Image('/common/images/b.png').width(200).height(200)}.alignItems(VerticalAlign.Bottom)...}}
}2.实现摇杆功能。
给摇杆(蓝色小圆图形)添加TouchEvent,动态改变摇杆position属性使摇杆跟随手指移动,主要代码如下:
onTouchEvent(event: TouchEvent) {switch (event.type) {case TouchType.Down:this.startX = event.touches[0].screenX;this.startY = event.touches[0].screenY;break;case TouchType.Move:this.curX = event.touches[0].screenX;this.curY = event.touches[0].screenY;this.getSmallCurrentPos(this.curX - this.smallR - 60, this.curY - this.smallR - 60)angle = Math.round(this.calculateAngle());break;default:break;}
}3.计算摇杆偏移角度。
主要代码如下:
calculateAngle() {var angle = 0var degree = Math.atan(this.getDisAbsY() / this.getDisAbsX()) * 180 / Math.PIvar quadrant = this.quadrant();switch (quadrant) {case this.QUADRANT_1:// 向右上移动angle = degree;break;case this.QUADRANT_2:// 向左上移动angle = 180 - degree;break;case this.QUADRANT_3:// 向左下移动angle = -180 + degree;break;case this.QUADRANT_4:// 向右下移动angle = -degree;break;default:angle = 0;break;}return angle;
}4.连接游戏端Service。
当手柄端被游戏端拉起时,获取游戏端传递的数据:游戏端deviceId和分数score。然后通过deviceId连接游戏端Service,主要代码如下:
aboutToAppear() {// 当被拉起时,通过want传递的参数同步对端界面UIawait featureAbility.getWant((error, want) => {// 远端被拉起后,连接游戏端的serviceif (want.parameters.deviceId) {let remoteDeviceId = want.parameters.deviceIdconnectRemoteService(remoteDeviceId)}});
}async function connectRemoteService(deviceId) {
...await featureAbility.connectAbility({'deviceId': deviceId,'bundleName': "com.huawei.cookbook",'abilityName': "com.huawei.cookbook.ServiceAbility",},{onConnect: onConnectCallback,onDisconnect: onDisconnectCallback,onFailed: onFailedCallback,},);
}5.通过RPC发送数据到游戏端。
连接游戏端Service之后,摇杆角度angle和操作类型actionType(1为发射子弹,2为释放技能)发送给游戏端,主要代码如下:
async function sendMessageToRemoteService() {
...let option = new rpc.MessageOption();let data = new rpc.MessageParcel();let reply = new rpc.MessageParcel();data.writeInt(actionType);data.writeInt(angle);await mRemote.sendRequest(1, data, reply, option);
}实现游戏端功能
- 实现布局和样式。
游戏界面主要由玩家飞机、敌机、子弹和道具(降落伞)等组成,由于敌机和子弹都是多个的,所以使用ForEach来实现,主要代码如下:
@Entry
@Component
struct Index {build() {Stack() {... ForEach(this.bullets, item => {Image(item.imgSrc).width(item.imgWidth).height(item.imgHeight).position({ x: item.positionX, y: item.positionY })}, item => item.timestamp.toString())ForEach(this.enemyPlanes, item => {Image(item.imgSrc).width(item.imgWidth).height(item.imgHeight).position({ x: item.positionX, y: item.positionY })}, item => item.timestamp.toString())Image('/common/images/planeOne.png').width(this.planeSize).height(this.planeSize).position({ x: this.planePosX, y: this.planePosY }).onTouch((event: TouchEvent) => {this.onTouchEvent(event)})Image('/common/images/props.png').width(this.propsSize).height(this.propsSize).position({ x: this.propsPosX, y: this.propsPosY })...}.height('100%').width('100%')}
}2.实现游戏端元素动画效果。
飞机、子弹和道具等元素的移动是通过动态改变Image的position属性来实现的。使用定时器setInterval每隔16ms重新设置界面元素position属性的值,主要实现代码如下:
startGame() {var that = thissetInterval(function () { // 每60*16ms创建一个敌机if (that.num % 60 == 0) {that.createEnemyPlane()}// 移动子弹var bulletsTemp: GameElement[] = []for (var i = 0; i < that.bullets.length; i++) {var bullet = that.bullets[i]bullet.positionY -= 8// 当子弹移除屏幕外的时候,释放掉if (bullet.positionY > 0) {bulletsTemp.push(bullet)}}that.bullets = bulletsTemp// 移动飞机var enemyPlanesTemp: GameElement[] = []for (var j = 0; j < that.enemyPlanes.length; j++) {var enemyPlane = that.enemyPlanes[j]enemyPlane.positionY += 6// 当飞机移除屏幕外的时候,释放掉if (enemyPlane.positionY < that.screenHeight) {enemyPlanesTemp.push(enemyPlane)}}that.enemyPlanes = enemyPlanesTemp// 每隔 500*16ms显示降落伞if (that.num % 500 == 0) {that.getPropsFlag = truethat.propsPosY = -that.propsSizethat.propsPosX = Math.round((Math.random() * (that.screenWidth - that.propsSize)))}// 刷新道具位置if (that.propsPosY < that.screenHeight) {that.propsPosY += 6}that.checkCollision()}, 16);}3.判断元素是否发生碰撞。
在setInterval中改变元素位置的时候同时检测元素之间是否发生碰撞,子弹和敌机发生碰撞则分数值改变(摧毁小飞机加50分,摧毁大飞机加100分),玩家飞机和道具发生碰撞则道具加1,主要实现代码如下:
checkCollision() {...for (var i = 0; i < this.enemyPlanes.length; i++) {var enemy = this.enemyPlanes[i];for (var j = 0; j < this.bullets.length; j++) {var bullet = this.bullets[j];var inside = this.isInside(bullet, enemy);// 发生碰撞if (inside) {enemy.imgSrc = '/common/images/boom.png'if (enemy.flag == 1) {this.score += 50sendMessageToRemoteService(that.score)} else if (enemy.flag == 2) {this.score += 100sendMessageToRemoteService(that.score)}// 清除子弹this.enemyPlanes.splice(i, 1);i--;enemy.flag = 3// 清除被子弹打中敌机that.bullets.splice(j, 1);j--;}}}// 飞机和降落伞是否发生碰撞var isGetProps = this.isInside(myPlane, props);if (isGetProps && this.getPropsFlag) {this.getPropsFlag = falsethis.bombNum++this.propsPosY = 2000}}4.获取设备列表。
点击界面右上角的“电脑”图标,调用registerDeviceListCallback()发现设备列表,并弹出设备列表选择框DeviceListDialog ,选择设备后拉起远端FA。DeviceListDialog 主要代码如下:
@CustomDialog
export struct DeviceListDialog {controller: CustomDialogControllerbuild() {Column() {Text("选择设备").fontWeight(FontWeight.Bold).fontSize(20).margin({ top: 20, bottom: 10 })List() {ForEach(deviceList, item => {ListItem() {Stack() {Text(item).fontSize(12).margin({ top: 10 })}.onClick(() => {startRemoteAbility(item)this.controller.close();}).padding({ left: 30, right: 30 })}}, item => item.toString())}.height("30%").align(Alignment.TopStart)
...}}
}5.拉起手柄端FA。
点击设备列表获取远程设备id后,拉起手柄端FA,代码如下:
function startRemoteAbility(deviceId) {var params = {deviceId: localDeviceId}var wantValue = {bundleName: 'com.huawei.cookbook',abilityName: 'com.huawei.cookbook.MainAbility',deviceId: deviceId,parameters: params};featureAbility.startAbility({want: wantValue}).then((data) => {console.info('[game] featureAbility.startAbility finished, localDeviceId=' + localDeviceId + '----deviceId:' + deviceId);// 拉起远端后,连接远端serviceconnectRemoteService(deviceId)});
}6.连接手柄端Service。
拉起手柄端FA后,连接手柄端Service,代码如下:
async function connectRemoteService(deviceId) {// 连接成功的回调async function onConnectCallback(element, remote) {mRemote = remote;}
...if (remoteDeviceModel.deviceList.length === 0) {return;}await featureAbility.connectAbility({'deviceId': deviceId,'bundleName': "com.huawei.cookbook",'abilityName': "com.huawei.cookbook.ServiceAbility",},{onConnect: onConnectCallback,onDisconnect: onDisconnectCallback,onFailed: onFailedCallback,},);
}7.通过RPC发送数据到手柄端。
通过RPC将游戏分数发送给手柄端,主要代码如下:
async function sendMessageToRemoteService(score) {console.log('[game]connectRemoteService sendMessageToRemoteService:')if (mRemote == null) {return;}let option = new rpc.MessageOption();let data = new rpc.MessageParcel();let reply = new rpc.MessageParcel();data.writeInt(score);await mRemote.sendRequest(1, data, reply, option);
}8.Service发布公共事件。
通过Service接收手柄端数据,然后使用CommonEvent模块将数据发送给FA,主要代码如下:
class GameServiceAbilityStub extends rpc.RemoteObject {
...onRemoteRequest(code, data, reply, option) {console.log('[game]Service onRemoteRequest');var publishCallBack;if (code === 1) {// 读取手柄端发送的数据let actionType = data.readInt();let angle = data.readInt();reply.writeInt(100);var params = {actionType: actionType,angle: angle,}var options = {code: 1,data: 'init data',isOrdered: true,bundleName: 'com.huawei.cookbook',parameters: params}publishCallBack = function () {}// 发布公共事件commonEvent.publish("publish_action", options, publishCallBack);} return true;}
}9.FA订阅公共事件。
订阅公共事件,接收从Service发送的公共事件数据,actionType 为操作类型(1表示发送子弹指令,2表示释放技能指令),angle 为飞机移动的角度。接收到数据后执行手柄端发送的指令:移动玩家飞机、发射子弹和释放技能摧毁所有敌机,主要代码如下:
subscribeEvent() {
...// 订阅公共事件回调function SubscribeCallBack(err, data) {let msgData = data.data;let code = data.code;
...// 处理接收到的数据datathat.actionType = data.parameters.actionType;that.angle = data.parameters.angle;if (that.actionType == 1) {that.createBullet()}if (that.actionType == 2) {if (that.bombNum > 0) {that.bombNum--that.destroyAllEnemy()}}if (that.angle != 0) {that.movePlaneByHandle()}}//创建订阅者回调function CreateSubscriberCallBack(err, data) {subscriber = data;//订阅公共事件commonEvent.subscribe(subscriber, SubscribeCallBack);}//创建订阅者commonEvent.createSubscriber(subscribeInfo, CreateSubscriberCallBack);
}恭喜您
通过本篇Codelab,您可以学到:
如何跨设备拉起远程FA。
如何连接远程Service。
使用RPC实现本地FA和远程Servcice通信。
通过CommonEvent发布与订阅实现Service和FA之间通信。
为了帮助大家更深入有效的学习到鸿蒙开发知识点,小编特意给大家准备了一份全套最新版的HarmonyOS NEXT学习资源,获取完整版方式请点击→《HarmonyOS教学视频》
HarmonyOS教学视频

鸿蒙语法ArkTS、TypeScript、ArkUI等.....视频教程

鸿蒙生态应用开发白皮书V2.0PDF:
获取白皮书完整版方式请点击→《鸿蒙生态应用开发白皮书V2.0PDF》

鸿蒙 (Harmony OS)开发学习手册
一、入门必看
- 应用开发导读(ArkTS)
- ……

二、HarmonyOS 概念
- 系统定义
- 技术架构
- 技术特性
- 系统安全
- ........

三、如何快速入门?《做鸿蒙应用开发到底学习些啥?》
- 基本概念
- 构建第一个ArkTS应用
- ……

四、开发基础知识
- 应用基础知识
- 配置文件
- 应用数据管理
- 应用安全管理
- 应用隐私保护
- 三方应用调用管控机制
- 资源分类与访问
- 学习ArkTS语言
- ……
五、基于ArkTS 开发
- Ability开发
- UI开发
- 公共事件与通知
- 窗口管理
- 媒体
- 安全
- 网络与链接
- 电话服务
- 数据管理
- 后台任务(Background Task)管理
- 设备管理
- 设备使用信息统计
- DFX
- 国际化开发
- 折叠屏系列
- ……
更多了解更多鸿蒙开发的相关知识可以参考:《鸿蒙 (Harmony OS)开发学习手册》



![[音视频学习笔记]七、自制音视频播放器Part2 - VS + Qt +FFmpeg 写一个简单的视频播放器](https://img-blog.csdnimg.cn/direct/2afff4465b2d45218068d2b4685630f9.png)