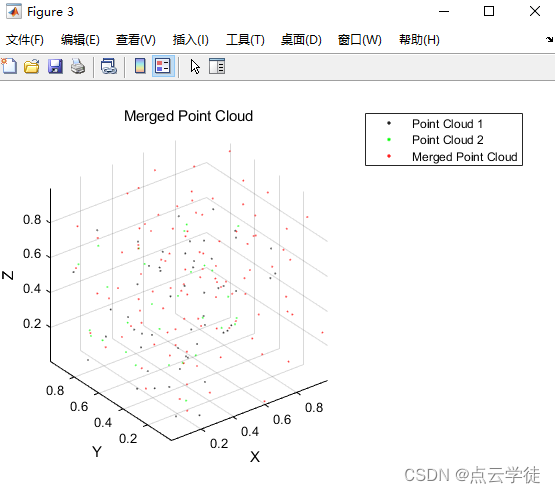
MATLAB 公共区域的点云合并(46)
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.rhkb.cn/news/287139.html
如若内容造成侵权/违法违规/事实不符,请联系长河编程网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章

ReactNative项目构建分析与思考之RN组件化
传统RN项目对比
ReactNative项目构建分析与思考之react-native-gradle-plugin
ReactNative项目构建分析与思考之native_modules.gradle
ReactNative项目构建分析与思考之 cli-config
在之前的文章中,已经对RN的默认项目有了一个详细的分析,下面我们来…
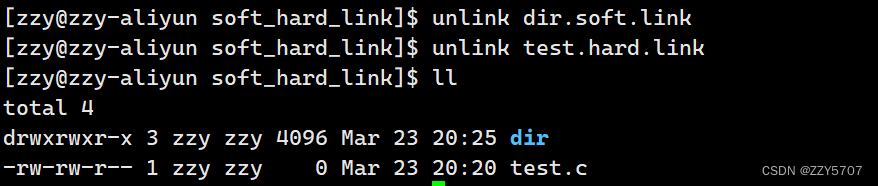
Linux之文件系统与软硬链接
前言
我们之前阐述的内容都是在文件打开的前提下, 但是事实上不是所有文件都是被打开的, 且大部分文件都不是被打开的(也就是文件当前并不需要被访问), 都在磁盘中进行保存. 那这些没有被(进程)打开的文件, 也是需要被管理的! 对于这部分文件核心工作之一是能够快速定位文件…
P1135 奇怪的电梯 (双向bfs)
输入输出样例
输入
5 1 5
3 3 1 2 5输出
3说明/提示
对于 100%100% 的数据,1≤N≤200,1≤A,B≤N,0≤Ki≤N。
本题共 1616 个测试点,前 1515 个每个测试点 66 分,最后一个测试点 10 分。
重写AC代码࿱…
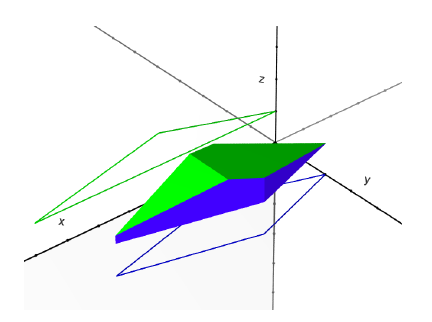
UVa1483/LA5075 Intersection of Two Prisms
题目链接 本题是2010年ICPC亚洲区域赛东京赛区的I题
题意 求两个无限高棱柱的交。其中一个棱柱是把xy平面上的凸多边形沿z轴无限拉长得到,另外一个棱柱是把xz平面上的凸多边形沿y轴无限拉长得到。输入给出第一个棱柱在xy平面的凸多边形坐标和另外一个棱柱在xz平面的…

voxelize_cuda安装教程 python+windows环境
import voxelize_cuda报错
安装步骤:
克隆voxelize项目 官网:https://github.com/YuliangXiu/neural_voxelization_layer.git
git clone https://github.com/YuliangXiu/neural_voxelization_layer.git下载一些必备的解析c文件的依赖 官网:…

鸿蒙应用开发-录音保存并播放音频
功能介绍:
录音并保存为m4a格式的音频,然后播放该音频,参考文档使用AVRecorder开发音频录制功能(ArkTS),更详细接口信息请查看接口文档:ohos.multimedia.media (媒体服务)。
知识点:
熟悉使用AVRecorder…

agent利用知识来做规划:《KnowAgent: Knowledge-Augmented Planning for LLM-Based Agents》笔记
文章目录 简介KnowAgent思路准备知识Action Knowledge的定义Planning Path Generation with Action KnowledgePlanning Path Refinement via Knowledgeable Self-LearningKnowAgent的实验结果 总结参考资料 简介
《KnowAgent: Knowledge-Augmented Planning for LLM-Based Age…
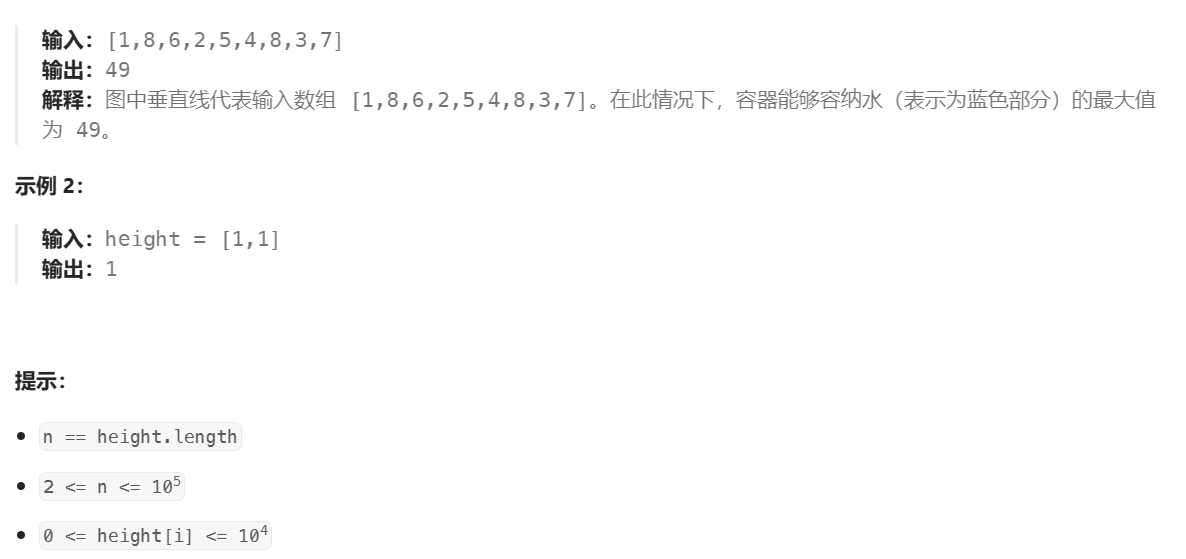
盛⽔最多的容器【双指针】
首先我们设该容器的两边为左右两边界。 这道题中的:盛⽔最大容量 底 * 高 左右两边界距离 * 左右两边界的较短板。 这道题如果用暴力求解,是个人都能想到怎么做,遍历所有的情况即可。 有没有更好的办法呢?我是搜了资料了解的。我…

Covalent Network(CQT)的以太坊时光机:在 Rollup 时代确保长期数据可用性
以太坊正在经历一场向 “Rollup 时代” 的转型之旅,这一转型由以太坊改进提案 EIP-4844 推动。这标志着区块链技术的一个关键转折,采用了一种被称为“数据块(blobs)”的新型数据结构。为了与以太坊的扩容努力保持一致,…
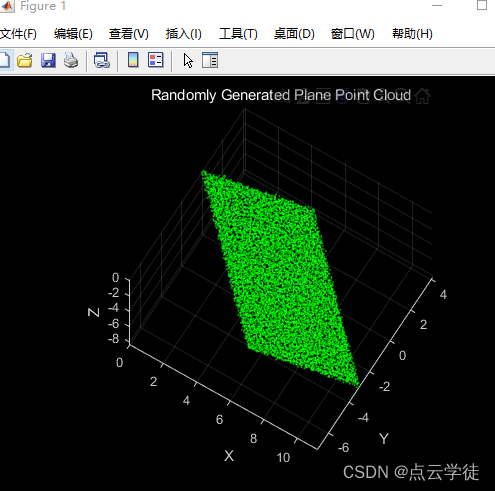
MATLAB 自定义生成平面点云(可指定方向,添加噪声)(48)
MATLAB 自定义生成平面点云(可指定方向,添加噪声)(48) 一、算法介绍二、算法步骤三、算法实现1.代码2.效果一、算法介绍
通过这里的平面生成方法,可以生成模拟平面的点云数据,并可以人为设置平面方向,平面大小,并添加噪声来探索不同类型的平面数据。这种方法可以用于…
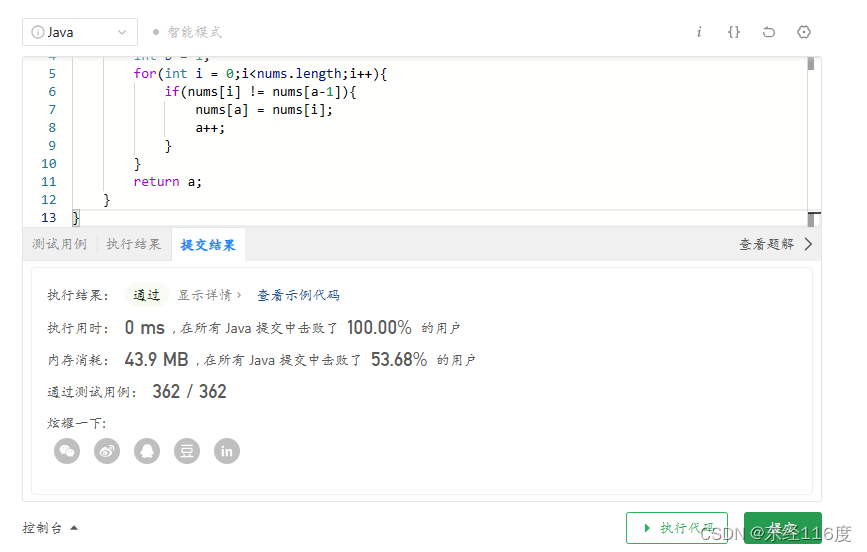
Java_15 删除排序数组中的重复项
删除排序数组中的重复项 给你一个 非严格递增排列 的数组 nums ,请你 原地 删除重复出现的元素,使每个元素 只出现一次 ,返回删除后数组的新长度。元素的 相对顺序 应该保持 一致 。然后返回 nums 中唯一元素的个数。
考虑 nums 的唯一元素的…

影视作品一键转成动漫,自媒体作者用DomoAI赢麻了
前言
众所周知,在自媒体爆火的那段时间,影视号是最容易起量的,借助高质量的影视,进行剪辑,解说,等二次创作,最终制作成高质量的作品,但是随着自媒体的发展,影视号越来越…

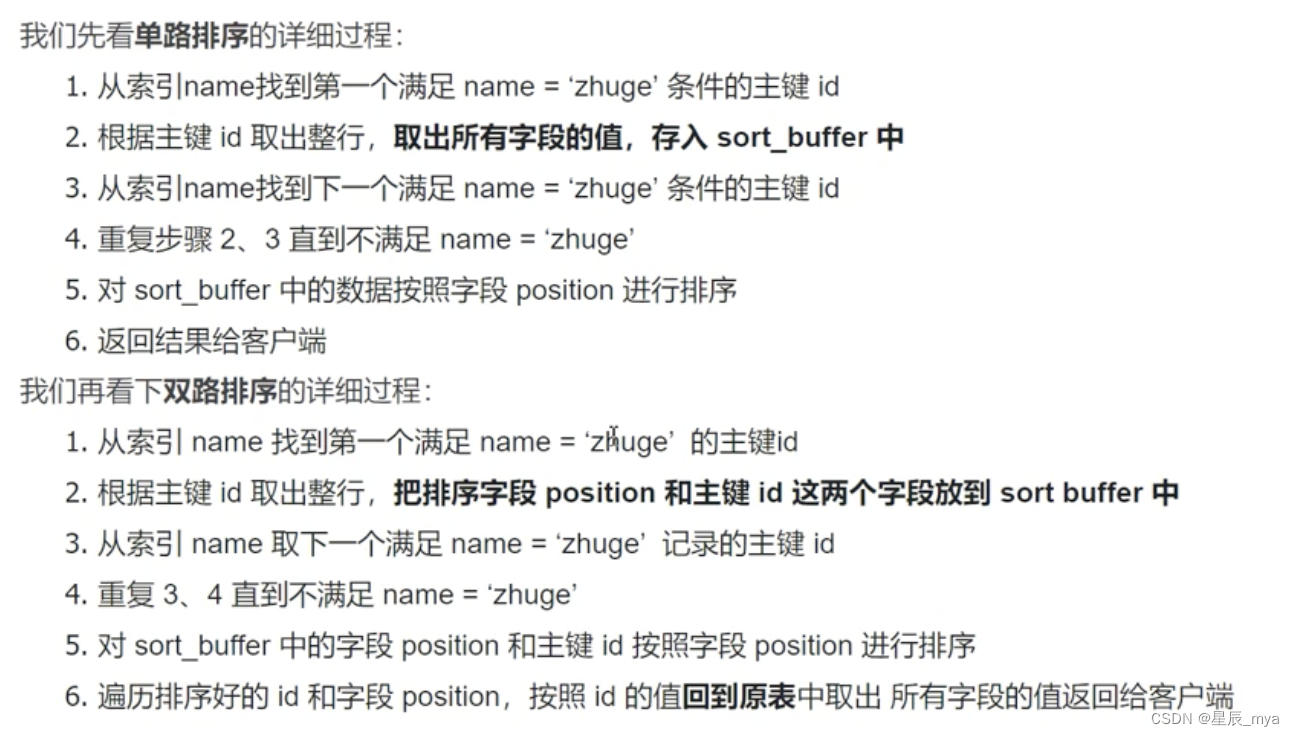
MyBatis是纸老虎吗?(七)
在上篇文章中,我们对照手动编写jdbc的开发流程,对MyBatis进行了梳理。通过这次梳理我们发现了一些之前文章中从未见过的新知识,譬如BoundSql等。本节我想继续MyBatis这个主题,并探索一下MyBatis中的缓存机制。在正式开始梳理前&am…

基于SpringBoot+MyBatis框架的智慧生活商城系统的设计与实现(源码+LW+部署+讲解)
目录
前言
需求分析
可行性分析
技术实现
后端框架:Spring Boot
持久层框架:MyBatis
前端框架:Vue.js
数据库:MySQL
功能介绍
前台功能拓展
商品详情单管理 个人中心
秒杀活动
推荐系统
评论与评分系统
后台功能拓…

测试小白必看:自动化测试入门基础知识
一、首先,什么是自动化测试?
自动化测试是把以人为驱动的测试行为转化为机器执行的一种过程。通常,在设计了测试用例并通过评审之后,由测试人员根据测试用例中描述的规程一步步执行测试,得到实际结果与期望结果的比较…
Vuex状态、数据持久化(vue2、vue3状态数据持久化)
简介:Vuex是一个仓库,是vue的状态管理工具,存放公共数据,任何组件都可以使用vuex里的公共数据。Vuex提供了插件系统,允许我们使用 vuex-persistedstate插件,将Vuex的状态持久化到本地存储中,解决…
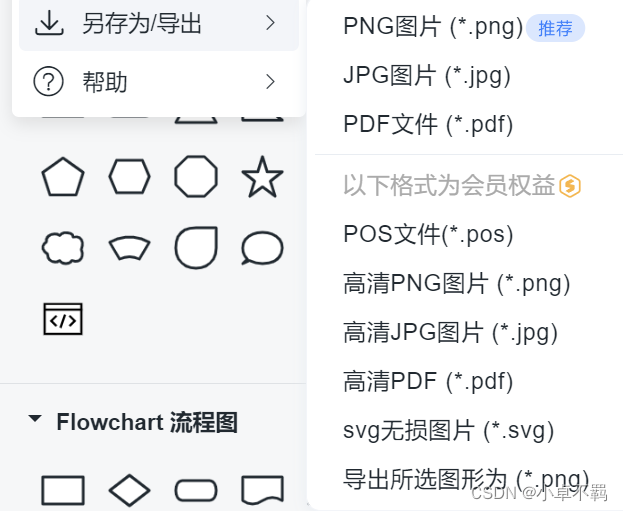
【工具篇】总结比较几种绘画软件的优缺点
目录 一、Visio二、Processon三、draw.io四、亿图图示五、wps 写在文章开头,感谢你的支持与关注!小卓的主页 一、Visio Visio 是微软公司开发的一款流程图和图表绘制软件。我们可以用它来创建各种类型的图表,如流程图、组织结构图、网络图、平…
【python从入门到精通】-- 第二战:注释和有关量的解释
🌈 个人主页:白子寰 🔥 分类专栏:python从入门到精通,魔法指针,进阶C,C语言,C语言题集,C语言实现游戏👈 希望得到您的订阅和支持~ 💡 坚持创作博文…
最新文章
- 上海专业网站建设精英/网站排名优化培训哪家好
- 香港做指数的网站/天津网络关键词排名
- 网站流程示意/百度ai搜索引擎
- 织梦添加网站音乐/培训平台
- 扬中网站优化/做一个自己的网站
- 网站建设步骤实践报告/营销推广活动策划方案大全
- Uniapp踩坑input自动获取焦点ref动态获取实例不可用
- 报错 No available slot found for the embedding model
- AI大模型(二):AI编程实践
- MFC程序崩溃时生成dmp文件
- 释放高级功能:Nexusflows Athene-V2-Agent在工具使用和代理用例方面超越 GPT-4o
- 微服务中的技术使用与搭配:如何选择合适的工具构建高效的微服务架构
推荐文章
- OneDrive账号被冻结如何进行解冻
- 酒店小程序开发的功能与优势解析
- 每天十分钟| Get实用在线英语启蒙教育APP—叽里呱啦
- # wps必须要登录激活才能使用吗?
- #智能车项目(三)串口初始化
- (※)力扣刷题-字符串-实现 strStr()(KMP算法)
- (2023|CVPR,Corgi,偏移扩散,参数高斯分布,弥合差距)用于文本到图像生成的偏移扩散
- (VIP-朝夕教育)2021-05-23 .NET高级班 02-反射
- (vue)新闻列表与图片对应显示,体现选中、移入状态
- (保姆级)离线安装mongoDB集群
- (层次遍历)104. 二叉树的最大深度
- (二)什么是Vite——Vite 和 Webpack 区别(冷启动)