mutex.h:信号量,互斥锁,读写锁,范围锁模板,自旋锁,原子锁
锁
**锁不能进行拷贝操作:**锁是用于管理多线程并发访问共享资源的同步原语。这些锁包括互斥锁(mutex)、读写锁(rwlock)等。它们通常不支持拷贝构造和拷贝赋值,这是为了防止在一个线程持有锁的情况下,另一个线程通过拷贝得到相同的锁,从而可能导致死锁或数据不一致的问题。
《Effective C++》 条款 06
想要禁止⼀个类对象的拷⻉操作,就要禁⽌拷⻉构造函数和拷⻉赋值运算符。
解决⽅案2:
定义⼀个基类专⻔阻⽌拷⻉动作,继承该基类的派生类起实例化对象也就无法进行拷⻉操作。
/*** @file noncopyable.h* @brief 不可拷贝对象封装*/
#ifndef __Fzk_NONCOPYABLE_H__
#define __Fzk_NONCOPYABLE_H__
namespace FzkCoroutine {
/*** @brief 对象无法拷贝,赋值*/
class Noncopyable {
public:/*** @brief 默认构造函数*/Noncopyable() = default;/*** @brief 默认析构函数*/~Noncopyable() = default;/*** @brief 拷贝构造函数(禁用)*/Noncopyable(const Noncopyable&) = delete;/*** @brief 赋值函数(禁用)*/Noncopyable& operator=(const Noncopyable&) = delete;
};
}
#endif
基于pthread进一步封装了信号量,互斥锁,读写锁,范围锁模板,自旋锁,原子锁。
局部锁模板:
采用RAII编程风格,RAII的核心思想是利用对象的生命周期来管理资源,确保资源在对象的构造函数中被获取,并在析构函数中被释放。
ScopedLockImpl 及其派生类通过在构造时获取资源(加锁)并在析构时释放资源(解锁)。
/*** @brief 局部锁的模板实现*/
template<class T>
struct ScopedLockImpl {
public:/*** @brief 构造函数* @param[in] mutex Mutex*/ScopedLockImpl(T& mutex):m_mutex(mutex) {m_mutex.lock();m_locked = true;}/*** @brief 析构函数,自动释放锁*/~ScopedLockImpl() {unlock();}/*** @brief 加锁*/void lock() {if(!m_locked) {m_mutex.lock();m_locked = true;}}/*** @brief 解锁*/void unlock() {if(m_locked) {m_mutex.unlock();m_locked = false;}}
private:/// mutexT& m_mutex;/// 是否已上锁bool m_locked;
};
类似于C++的lock_guard:
lock_guard通过与互斥锁(mutex)结合使用来实现线程同步。当创建一个lock_guard对象时,获取提供给它的互斥锁的所有权,并自动调用互斥锁的lock()方法来加锁。如果互斥锁已经被其他线程锁定,当前线程将会阻塞,直到互斥锁被解锁。
当lock_guard对象离开作用域时,它的析构函数会被自动调用。在析构函数中,lock_guard会调用互斥锁的unlock()方法来解锁互斥锁。这样可以确保即使在异常情况下,互斥锁也能被正确解锁,避免死锁的发生。
lock_guard特点:
1、创建即加锁,作⽤域结束⾃动析构并解锁,⽆需⼿⼯解锁
2、不能中途解锁,必须等作⽤域结束才解锁
3、不能复制
#include <iostream>
#include <thread>
#include <mutex>
std::mutex mtx; // 定义一个互斥锁
int counter = 0; // 共享资源void increment() {for (int i = 0; i < 100000; ++i) {std::lock_guard<std::mutex> lock(mtx); // 加锁++counter; // 访问共享资源}
}
int main() {std::thread t1(increment);std::thread t2(increment);t1.join();t2.join();std::cout << "Counter: " << counter << std::endl;return 0;
}
互斥量Mutex:
/*** @brief 互斥量*/
class Mutex : Noncopyable { //继承不可拷贝数据类
public: /// 局部锁typedef ScopedLockImpl<Mutex> Lock;/*** @brief 构造函数*/Mutex() {pthread_mutex_init(&m_mutex, nullptr);}/*** @brief 析构函数*/~Mutex() {pthread_mutex_destroy(&m_mutex);}/*** @brief 加锁*/void lock() {pthread_mutex_lock(&m_mutex);}/*** @brief 解锁*/void unlock() {pthread_mutex_unlock(&m_mutex);}
private:/// mutexpthread_mutex_t m_mutex;
};
读写互斥量RWMutex:
/*** @brief 读写互斥量*/
class RWMutex : Noncopyable{
public:/// 局部读锁typedef ReadScopedLockImpl<RWMutex> ReadLock;/// 局部写锁typedef WriteScopedLockImpl<RWMutex> WriteLock;/*** @brief 构造函数*/RWMutex() {pthread_rwlock_init(&m_lock, nullptr);}/*** @brief 析构函数*/~RWMutex() {pthread_rwlock_destroy(&m_lock);}/*** @brief 上读锁*/void rdlock() {pthread_rwlock_rdlock(&m_lock);}/*** @brief 上写锁*/void wrlock() {pthread_rwlock_wrlock(&m_lock);}/*** @brief 解锁*/void unlock() {pthread_rwlock_unlock(&m_lock);}
private:/// 读写锁pthread_rwlock_t m_lock;
};
自旋锁
自旋锁是一种同步机制,它不会导致线程进入睡眠状态,而是通过循环不断尝试获取锁资源,可以避免线程切换的开销。但只适用于锁被持有时间短的场景,自旋等待的时间不会太长,而且可以避免线程切换的开销。如果锁被持有时间较长或竞争激烈导致很多线程在自旋等待,那么自旋锁可能会导致CPU资源的浪费,因为线程在等待时会持续占用CPU周期。
此外,自旋锁不适合在中断处理中使用,因为中断处理程序应该尽快完成,避免长时间占用CPU。
/*** @brief 自旋锁*/
class Spinlock : Noncopyable {
public:/// 局部锁typedef ScopedLockImpl<Spinlock> Lock;/*** @brief 构造函数*/Spinlock() {pthread_spin_init(&m_mutex, 0);}/*** @brief 析构函数*/~Spinlock() {pthread_spin_destroy(&m_mutex);}/*** @brief 上锁*/void lock() {pthread_spin_lock(&m_mutex);}/*** @brief 解锁*/void unlock() {pthread_spin_unlock(&m_mutex);}
private:/// 自旋锁pthread_spinlock_t m_mutex;
};
原子锁??感觉就是用原子布尔类型实现的自旋锁
CASLock使用C++11中的std::atomic_flag来实现无锁同步,lock()函数使用std::atomic_flag_test_and_set_explicit()函数尝试获取锁,如果获取失败则一直循环等待。unlock()函数使用std::atomic_flag_clear_explicit()函数释放锁。
定义了一个volatile std::atomic_flag类型的成员变量m_mutex,用于表示锁的状态。由于它是volatile类型的,因此编译器不会对其进行优化,保证了其可见性,每次操作都会从内存读取m_mutex的值。
/*** @brief 原子锁*/
class CASLock : Noncopyable {
public:/// 局部锁typedef ScopedLockImpl<CASLock> Lock;/*** @brief 构造函数*/CASLock() {m_mutex.clear();}/*** @brief 析构函数*/~CASLock() {}/*** @brief 上锁*/void lock() {//获取失败则一直循环等待 感觉和自旋锁没区别了while (std::atomic_flag_test_and_set_explicit(&m_mutex, std::memory_order_acquire));}/*** @brief 解锁*/void unlock() {std::atomic_flag_clear_explicit(&m_mutex, std::memory_order_release);}
private:/// 原子状态volatile std::atomic_flag m_mutex;
};CASLock lock;
int shared_data = 0;void thread_func() {for (int i = 0; i < 100000; ++i) {CASLock::Lock l(lock); // 加锁++shared_data; // 访问共享资源}
}int test2() {std::thread t1(thread_func);std::thread t2(thread_func);t1.join();t2.join();std::cout << "shared_data: " << shared_data << std::endl;return 0;
}
测试效果:
1、加原子锁
2、未加原子锁
#include 只能将基本数据类型声明为原子变量


#include<iostream>
#include<thread>
#include<windows.h>
#include<atomic> //新增
#include<vector>
#include<mutex>
using namespace std;
void Mythread(atomic<int>& num) //修改
{for (int i = 0; i < 100000; i++){ num++; }
}
void test03()
{//int num = 0;std::atomic<int> num = 0;int threadNum = 2; //线程个数vector<std::thread> m_thread;m_thread = vector<std::thread>(threadNum);for (auto i = 0; i < threadNum; i++){m_thread[i] = std::thread(Mythread, &num);}for (auto i = 0; i < threadNum; i++){m_thread[i].join();}cout <<"结果:"<<num << endl;
}
int main()
{test03();system("pause");return 0;
}
小结一下:
互斥量(Mutex):
互斥量是最基本的同步机制之一。它阻止多个线程同时访问共享资源。
当一个线程锁定互斥量时,如果另一个线程尝试锁定同一个互斥量,它将被阻塞(挂起),直到拥有锁的线程释放该锁。
互斥量适用于锁定时间较长的场景,比如复杂操作或涉及I/O的操作。
在 C++ 中,可以使用 头文件中的 std::mutex 类。
自旋锁(Spinlock):
自旋锁在等待锁释放时,线程会在循环检查锁的状态直到获取锁,它不会使线程挂起,而是占用CPU周期等待。
自旋锁适用于锁定时间非常短的场景,因为它避免了线程挂起和恢复的开销(避免线程切换)。
C++11 标准没有直接提供自旋锁,但可以通过原子操作实现,或者使用平台特定的实现(如 POSIX 的 pthread_spinlock,POSIX“可移植操作系统接口”,能够在多种系统之间使用)。
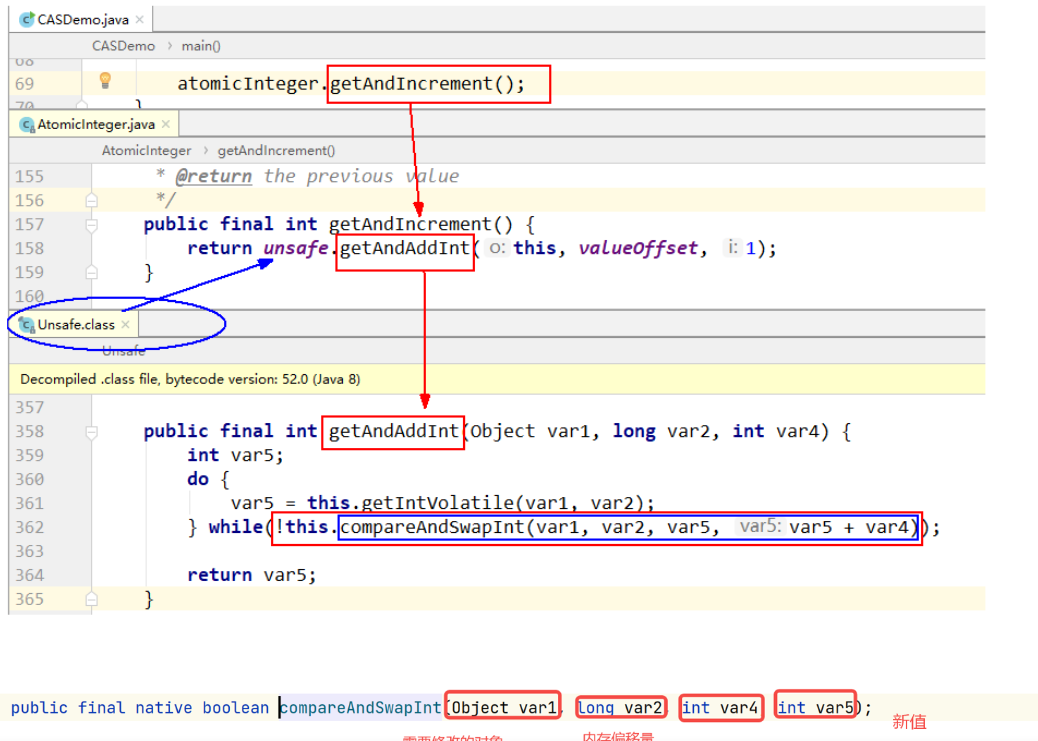
原子锁(Atomic Lock):
原子操作是指不可分割、不会被线程调度机制打断的操作。在执行完毕之前,不会有其他线程对这个操作进行干扰。
C++11 引入了原子操作库 ,提供了一组原子类型,如 std::atomic,可以用来实现低开销的线程安全操作。
原子操作通常用于简单的赋值、递增、递减等操作,而且是无锁的,所以开销比互斥量和自旋锁都要小。
总结:
使用互斥量时,长时间锁定资源会使其他线程挂起,适合复杂操作。
使用自旋锁时,线程会忙等待直到获取锁,适合短时间锁定资源。
使用原子操作时,可以保证单一操作的线程安全,无需锁定,开销最小,但仅限于简单操作(因为只有两种状态)。