视频插针
- 1、评估指标
- 2、准确度
- 3、实时
- 4、视频流处理
- 3、实时
- RIFE视频插帧测试
1、评估指标
参考:https://blog.csdn.net/weixin_43478836/article/details/104159648
https://blog.csdn.net/weixin_43605641/article/details/118088814
PSNR和SSIM
PSNR数值越大表示失真越小。,因为数值越大代表MSE越小。MSE越小代表两张图片越接近,失真就越小。
SSIM≤1,SSIM 越大,两张图像越相似。
PSNR(峰值信噪比,Peak Signal-to-Noise Ratio),用于衡量两张图像之间差异,例如压缩图像与原始图像,评估压缩图像质量;复原图像与ground truth,评估复原算法性能等。
SSIM(结构相似性,Structural Similarity)基于人眼会提取图像中结构化信息的假设,比传统方式更符合人眼视觉感知。
但是 PSNR 和 SSIM 都只适合画面复杂度低或完全对齐的图像,例如下图是同一地点的不同时期卫星图像及其重叠显示,对人眼来说相似度高,但由于没对齐导致 SSIM 很低。
2、准确度
参考:https://github.com/zdyshine/Video-Frame-Interpolation-Summary/blob/main/2023_before.md
https://zhuanlan.zhihu.com/p/362525023


3、实时
RIFE
IFRNet:CVPR 2022|上海交大&腾讯优图提出IFRNet:视频插帧新范式&新SOTA
CAIN ncnn Vulkan - 只能用于 0.5 时刻点(两帧插一帧)的 AI 视频补帧算法
rife-ncnn-vulkan - 只能用于 0.5 时刻点(两帧插一帧)的 AI 视频补帧算法(速度较快,效果非常好)
DAIN ncnn Vulkan - 支持任意时刻点插帧的 AI 视频补帧算法(速度最慢,占用最高,效果非常好)
谷歌的FILM: Frame Interpolation for Large Motion
https://github.com/google-research/frame-interpolation?tab=readme-ov-file
4、视频流处理
OpenCV、Kafka 和 Spark 技术
所谓视频流,就是一种视频数据信息的传输方式,使用这种方式,用户可以在没有接到完整的数据信息前就能处理那些已接收的信息。这种一边接收,一边处理的方式,很好地解决了视频数据信息在网络上的传输问题。使用者可以不必等待太长的时间,就能收看到视频数据信息。并且在此之后一边播放,一边接收,根本不会感觉到文件没有传完。
视频流是指将视频内容以连续的流式方式传输或播放,而不需要等待整个视频文件下载完毕。视频流使用户能够实时观看视频,而无需等待全部内容下载到本地设备。这种流式传输方式适用于各种视频应用,包括在线视频播放、视频会议、实时转播和直播流等。
视频流:
实时观看:视频流允许用户实时观看视频内容,而不需要等待整个视频文件下载完毕。视频数据以连续的流式方式传输到观众设备,观众可以在数据传输的同时观看内容。
连续性:视频流是连续的数据流,它们通常分为小段,每个段都可以独立下载和播放。观众可以随时开始观看视频,并且可以在观看过程中继续下载后续段。
动态自适应:视频流通常支持动态自适应,可以根据观众的网络带宽和设备性能实时调整视频质量和码率,以提供更好的观看体验。
opencv-python视频流基本操作【视频流是由一帧一帧的图像构成的,我们对视频流的处理,本质上就是对图像的处理,因此这里我们只说明从相机中读取视频,从 …
5、预测视频的动态部分,生成i帧
视频预测是一项复杂的时间序列预测任务。
3、实时
RIFE
IFRNet:CVPR 2022|上海交大&腾讯优图提出IFRNet:视频插帧新范式&新SOTA
IFRNet
CAIN ncnn Vulkan - 只能用于 0.5 时刻点(两帧插一帧)的 AI 视频补帧算法
rife-ncnn-vulkan - 只能用于 0.5 时刻点(两帧插一帧)的 AI 视频补帧算法(速度较快,效果非常好)
DAIN ncnn Vulkan - 支持任意时刻点插帧的 AI 视频补帧算法(速度最慢,占用最高,效果非常好)
谷歌的FILM: Frame Interpolation for Large Motion (只有图片demo)效果可以
https://github.com/google-research/frame-interpolation?tab=readme-ov-file
EMA-VFI (只有图片demo)效果可以
VFIformer (要训练,只有图片)
集成工具
AaronFeng753/Waifu2x-Extension-GUI: Video, Image and GIF upscale/enlarge(Super-Resolution) and Video frame interpolation. Achieved with Waifu2x, Real-ESRGAN, Real-CUGAN, RTX Video Super Resolution VSR, SRMD, RealSR, Anime4K, RIFE, IFRNet, CAIN, DAIN, and ACNet. (github.com)
1、 实时插帧算法对比
实时插针算法主要有:RIFE、IFRNet、DAIN、CAIN,他们的性能对比如下:

评估指标:PSNR、SSIM和FPS
PSNR(峰值信噪比,Peak Signal-to-Noise Ratio),用于衡量两张图像之间差异,例如压缩图像与原始图像,评估压缩图像质量;复原图像与ground truth,评估复原算法性能等。PSNR数值越大表示失真越小。,因为数值越大代表MSE越小。MSE越小代表两张图片越接近,失真就越小。
SSIM(结构相似性,Structural Similarity)基于人眼会提取图像中结构化信息的假设,比传统方式更符合人眼视觉感知。SSIM≤1,SSIM 越大,两张图像越相似。
FPS是图像领域中的定义,是指画面每秒传输帧数,通俗来讲就是指动画或视频的画面数
2、 设备要求
2GB 以上显存, 4GB 左右的空余运行内存以及4GB+的磁盘剩余空间
3、 测试结果
RIFE
视频分辨率1280x720
1.没量化

2.开启fp16量化

3.开启scale=0.5

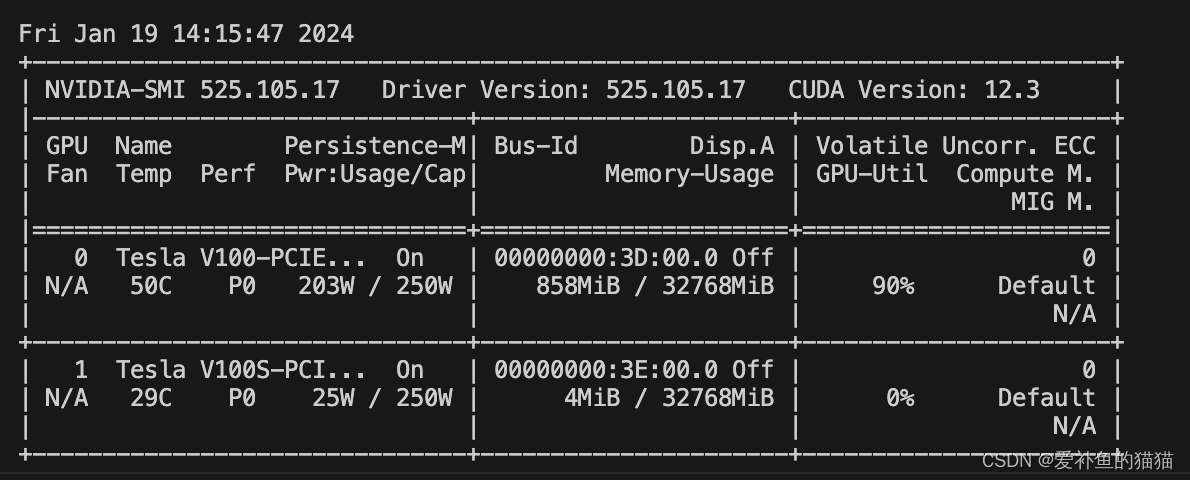
显卡v100占用
参考:
https://zhuanlan.zhihu.com/p/362525023
https://github.com/zdyshine/Video-Frame-Interpolation-Summary/blob/main/2023_before.md
RIFE视频插帧测试
1、环境部署
#拉取镜像
docker pull nvcr.io/nvidia/pytorch:23.12-py3
#创建docker
docker run --gpus all --cpus 48 --shm-size 16G --memory 500gb --privileged=true -itd --name rife_test
#git拉取源码
git clone https://github.com/megvii-research/ECCV2022-RIFE.git
#安装运行相关包
cd ECCV2022-RIFE
pip3 install -r requirements.txt
2、运行推理
插帧命令
插一帧:python3 inference_video.py --exp=1 --video=video.mp4
插两帧:python3 inference_video.py --exp=2 --video=video.mp4
参数说明:
python3 inference_video.py --exp=2 --video=video.mp4 --fps=60 --scale=0.5
exp:插多少帧
video:输入视频路径
fp16:是否使用半精度
scale:压缩视频质量(如果您的视频具有非常高的分辨率,例如 4K,我们建议设置 --scale=0.5(默认为 1.0)。如果您在视频上生成无序模式,请尝试设置 --scale=2.0。此参数控制光流模型的过程分辨率)
3、对比展示
对比方法:
对比方法:对比视频的流畅度,用ffmpeg将多个视频拼接在一起对比(会有压缩),高帧率的硬件不支持(测试设备最高支持60Hz)
横向2个视频排列命令:ffmpeg -i 0.mp4 -i 1.mp4 -filter_complex “[0:v]pad=iw2:ih1[a];[a][1:v]overlay=w” out.mp4
4个视频排列命令:ffmpeg -i 0.mp4 -i 1.mp4 -i 2.mp4 -i 3.mp4 -filter_complex “[0:v]pad=iw2:ih2[a];[a][1:v]overlay=w[b];[b][2:v]overlay=0:h[c];[c][3:v]overlay=w:h” out.mp4
展示效果如下:
4、速度对比
对比方法:
1、同一显卡不同参数推理速度对比
2、不同显卡推理速度对比
V100显卡不同参数测试如下图:
1.没量化,推理速度20fps左右
2.开启fp16量化,推理速度25fps左右
3.开启scale=0.5,推理速度28fps左右
4.显卡占用,1G显存左右
2080TiV100显卡不同参数测试如下图:
1.没量化,推理速度17fps左右
2.fp16量化,推理速度22fps左右
3.scale=0.5量化,推理速度31fps左右
测试结论:V100和2080ti显卡的算力差不多,推理需要显存1G左右,在没有量化 的情况下推理速度最高20fps左右,量化情况下推理速度最高30fps。